Изобретение относится к области механизации погрузочно-загрузочных работ на транспортных средствах.
Цель изобретения - расширение эксплуатационных возможностей устройства.
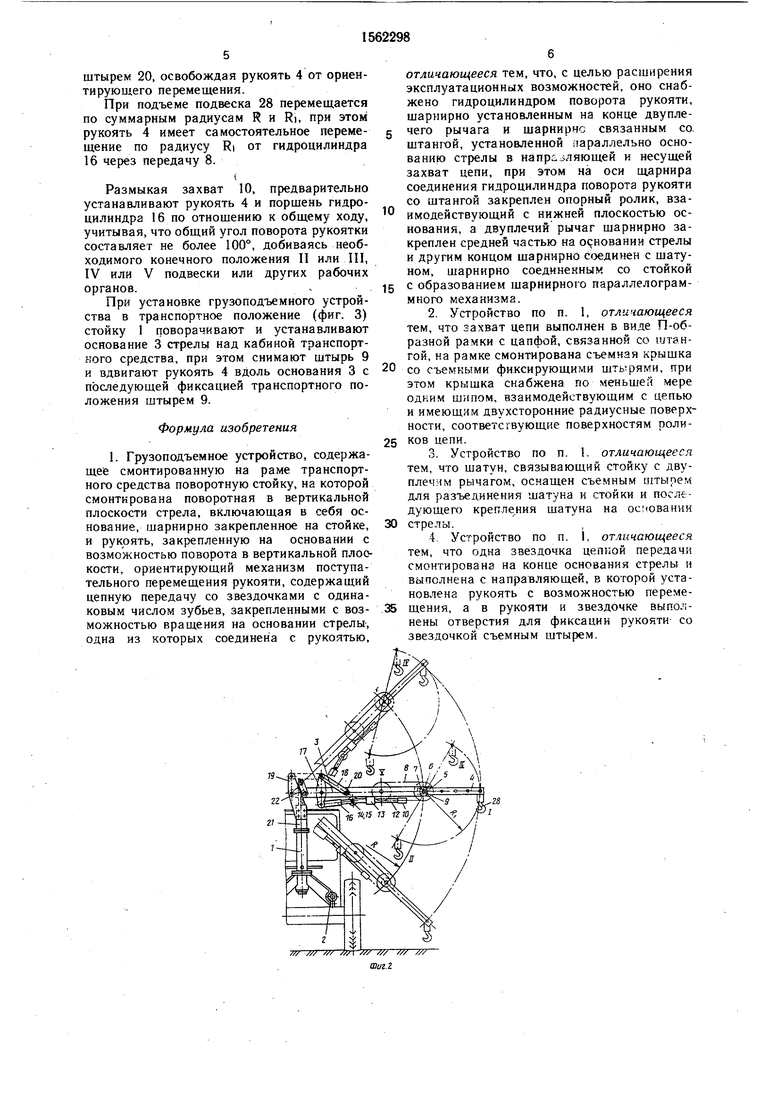
На фиг. 1 изображено устройство с ковшом в рабочих положениях; на фиг. 2 - то же, с крюковой подвеской; на фиг. 3 - то же, в транспортном положении; на фиг. 4 - кинематическая схема стрелы; на фиг. 5 - установка концевой звездочки на основании стрелы; на фиг. 6 - конструкция захвата; на фиг. 7 - разрез А-А на фиг. 6.
Устройство состоит из поворотной стойки 1, закрепленной на раме 2 транспортного средства, двухсекционной стрелы, включающей коробчатое основание 3 и рукоять 4 в виде профильной полосы, установленной с наружной стороны основания 3 в Т-образном пазу 5 направляющей 6, жестко связанной с концевой звездочкой 7 цепной передачи 8 поступательно-ориентирующего механизма.
Рукоять 4 установлена в пазу 5 с возможностью перемещения и фиксируется по оси звездочки 7 съемным штырем 9. Цепная передача снабжена захватом 10, который через цапфу 11 (фиг. 7) связан с одним концом штанги 12, установленной в направляющей 13, закрепленной на основании 3 стрелы. Другой конец штанги 12 связан через шарнир 14, на котором установлен опорный ролик 15, взаимодействующий с нижней плоскостью основания 3 стрелы, с гидроцилиндром 16 поворота рукояти 4, который также шарнирно закреплен на двуплечем рычаге-кривошипе 17 параллелограммного механизма, в состав которого входят шатун 18, соединяющий рычаг-кривошип 17 с кронштейном 19 стойки 1 через съемный штырь 20. Подъем основания 3 стрелы осуществляется гидроцилиндром 21 с помощью серьги 22, при этом гидроцилиндр 21 установлен соосно со стойкой 1.
Захват 10 (фиг. 6) выполнен в виде П-образной рамки 23, обхватывающей цепь цепной передачи 8, в нижней части которой
установлена съемная крышка 24, зафиксированная в рамке 23 быстросъемными штырями 25. Крышка содержит шипы 26, имеющие двухсторонние радиусные поверхности, кон- 0 тактирующие с роликами цепи.
На рукояти могут быть закреплены ковш 27 (фиг. 1), крюковая подвеска 28 (фиг. 2) или другие сменные рабочие органы.
Устройство работает следующим обра5 зом
При погрузке сыпучих грузов (фиг. 1)
на рукояти 4 закрепляют ковш 27, поршень гидроцилиндра 16 устанавливают в среднее положение хода гидроцилиндра, шатун 18 фиксируют с кронштейном 19 штырем
0 20. При разомкнутом захвате 10 рукоять 4 устанавливают в необходимое положение (например, положение I в крайнем нижнем положении стрелы) и фиксируют захват 10 с цепью цепной передачи 8. Погрузочные работы осуществляют с боковых сторон транс5 портного средства.
В нижнем положении включением гидроцилиндра 16 перемещают при необходимости ковш 27 из положения I в положение II, приподнимая при этом стрелу гидроцилиндра 21, а затем в положение III, осуществляя загрузку ковша сыпучим материалом.
При подъеме в верхнее положение ковш 27 остается в ориентированном положении за счет работы параллелограммного
5 механизма и углового перемещения цепной передачи 8, равного угловому перемещению рычага-кривошипа 17.
Для высыпки груза включают гидроцилиндр 16, который, перемещая передачу 8, поворачивает рукоять 4 с ковшом 27 в
0 положение IV. При недостаточности угла высыпки груза опускают основание 3 стрелы, увеличивая угол наклона ковша. Поворачивая стойку 1 вручную, можно перемещать ковш в любое положение горизонтальной плоскости.
5 При погрузке штучных грузов на рукоять 4 (фиг. 2) закрепляют крюковую подвеску 28, шатун 18 размыкают с кронштейном 19 и закрепляют на основании 3 стрелы
0
штырем 20, освобождая рукоять 4 от ориентирующего перемещения.
При подъеме подвеска 28 перемещается по суммарным радиусам R и Ri, при этом рукоять 4 имеет самостоятельное перемещение по радиусу RI от гидроцилиндра 16 через передачу 8.
(
Размыкая захват 10, предварительно устанавливают рукоять 4 и поршень гидроцилиндра 16 по отношению к общему ходу, учитывая, что общий угол поворота рукоятки составляет не более 100°, добиваясь необходимого конечного положения II или III, IV или V подвески или других рабочих органов.
При установке грузоподъемного устройства в транспортное положение (фиг. 3) стойку 1 поворачивают и устанавливают основание 3 стрелы над кабиной транспортного средства, при этом снимают штырь 9 и вдвигают рукоять 4 вдоль основания 3 с последующей фиксацией транспортного положения штырем 9.
Формула изобретения
1. Грузоподъемное устройство, содержащее смонтированную на раме транспортного средства поворотную стойку, на которой смонтирована поворотная в вертикальной плоскости стрела, включающая в себя основание, шарнирно закрепленное на стойке, и рукоять, закрепленную на основании с возможностью поворота в вертикальной плоскости, ориентирующий механизм поступательного перемещения рукояти, содержащий цепную передачу со звездочками с одинаковым числом зубьев, закрепленными с возможностью вращения на основании стрелы, одна из которых соединена с рукоятью.
отличающееся тем, что, с целью расширения эксплуатационных возможностей, оно снабжено гидроцилиндром поворота рукояти, шарнирно установленным на конце двупле- чего рычага и шарнирчс связанным со штангой, установленной лараллельно основанию стрелы в напрсзляющей и несущей захват цепи, при этом на оси щарнира соединения гидроцилиндра поворота рукояти со штангой закреплен опорный ролик, взаимодействующий с нижней плоскостью основания, а двуплечий рычаг шарнирно закреплен средней частью на основании стрелы и другим концом шарнирно соединен с шатуном, шарнирно соединенным со стойкой
5 с образованием шарнирного параллелограм- много механизма.
2.Устройство по п. 1, отличающееся тем, что захват цепи выполнен в виде П-об- разной рамки с цапфой, связанной со штэн- гой, на рамке смонтирована съемная крышка
0 со съемными фиксирующими штырями, при этом крышка снабжена по меньшей мере одним шипом, взаимодействующим с цепью и имеющим двухсторонние радиусные поверхности, соответствующие поверхностям роли5 ков цепи.
3.Устройство по п. 1. отличающееся тем, что шатун, связывающий стойку с двуплеч ш рычагом, оснащен съемным штыпем для разъединения шатуна к стойки и последующего крепления шатуна на осчовании
0 стрелы.
4 Устройство по п. 1. отличающееся тем, что одна звездочка цепной передачи смонтирована на конце основания стрелы и выполнена с направляющей, в которой установлена рукоять с возможностью переме5 щения, а в рукояти и звездочке выполнены отверстия для фиксации рукояти со звездочкой съемным штырем.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМОБИЛЬНЫЙ КОНСОЛЬНЫЙ КРАН | 2016 |
|
RU2624888C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
| СПОСОБ ЭКСКАВАЦИИ ГРУНТА ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032029C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| ПОГРУЗОЧНАЯ МАШИНА | 1991 |
|
RU2042831C1 |
| Землеройно-крановое устройство | 1986 |
|
SU1408022A1 |
| Грузоподъемное устройство | 1989 |
|
SU1701620A1 |
| ПОЖАРНЫЙ ГИДРОПОДЪЕМНИК | 1972 |
|
SU421330A1 |
| Одноковшовый экскаватор | 1987 |
|
SU1463870A1 |
| ПОГРУЗЧИК-ТРАНСПОРТИРОВЩИК РУЛОНОВ СЕНОСОЛОМИСТЫХ МАТЕРИАЛОВ | 2015 |
|
RU2580163C1 |


Изобретение относится к механизации погрузочно-разгрузочных работ на транспортных средствах. Цель изобретения - расширение эксплуатационных возможностей устройства. Грузоподъемное устройство содержит поворотную стойку 1, смонтированную на раме 2 транспортного средства, сочлененные стрелу и рукоять 4, поступательно-ориентирующий механизм рукоятки в виде цепной передачи 8 с втулочно-роликовой цепью и передаточным отношением звездочек I = 1, параллелограммный механизм, включающий части основания и стойки, гидроцилиндр подъема стрелы, а также сменные рабочие органы. Гидроцилиндр 16 рукояти 4 смонтирован на двуплечем рычаге-кривошипе 17 параллелограмного механизма и связан с поступательно-ориентирующим механизмом рукояти через захват 10 цепи и штангу 12, установленную параллельно основанию стрелы в направляющей 13, при этом шарнир 14 соединения гидроцилиндра 16 рукояти со штангой 12 снабжен опорным роликом 15, взаимодействующим с нижней плоскостью основания 3 стрелы. Захват 10 цепи выполнен в виде П-образной рамки с цапфой, связанной со штангой 12, на рамке смонтирована съемная крышка с быстросъемными фиксирующими штырями, при этом крышка снабжена по меньшей мере одним шипом, взаимодействующими с цепью и имеющим двухсторонние радиусные поверхности, соответствующие поверхностям роликов цепи. 3 з.п. ф-лы, 7 ил.
2217 18 16
19
21
Фиг. 4
Фи2.В
Фиг. 5
А-А
1211
Фиг.7
| Крайнев А | |||
| Ф | |||
| Словарь-справочник по механизмам.-М.: Машиностроение, 1987 с | |||
| Прибор для определения при помощи радиосигналов местоположения движущегося предмета | 1921 |
|
SU319A1 |
