Изобретение относится к области машиностроения, и в частности к шарнирным манипуляторам и роботам с механизмами параллельной структуры, и может найти применение в сборочных технологических стендах, в строительстве и автоматических линиях, шахтных подъемниках и механизмах подачи боеприпасов, складывающихся установках запуска беспилотных летательных аппаратов, а также в грузовых морских портах и подъемниках грузов из трюма на палубу корабля для подъема и двух координатного перемещения, преимущественно длинномерных грузов с точным сохранением их заданной горизонтальной ориентации во всем рабочем пространстве манипулятора.
Известен шарнирный грузоподъемный манипулятор, содержащий установленное на опорном основании шарнирно-рычажное устройство замкнутой кинематической цепи с шарнирным подвесом груза, которая выполнена в виде кинематически связанных между собой двух разных кривошипных механизмов и одного двух коромыслового механизма, составленных из различных звеньев различной конфигурации (Енчев К.И., Стойкое С.Б. «Совмещение экстремального и оптимизационного синтеза при проектировании направляющего механизма портального крана»//журнал «Теория механизмов и машин». №2(12), 2008 год, Том б. - Изд-во СПбГПУ - с. 38, рис. 3 (www.tmm.spbstu.ru) - аналог.
Недостатками известного грузоподъемного манипулятора являются сложность конструкции и системы управления, большие габариты в нерабочем положении и возникающие угловые перекосы и колебания переносимого длинномерного груза, нарушающие его заданную горизонтальную ориентацию во всем рабочем пространстве.
Наиболее близким по технической сущности и достигаемому эффекту к предполагаемому изобретению является платформенный манипулятор параллельной структуры, содержащий опорное основание и подвижную грузовую платформу, кинематически связанные между собой посредством шести параллельно установленных между собой замкнутых кинематических цепей раздвижных стержневых опор ног, содержащих 12 сложных сферических шарниров и 6 приводных подвижных гидроцилиндров для подъема грузовой платформы (книга Вульфсон И.И. и др. «Механика машин: Учебное пособие для втузов» - М.: Высшая школа, 1996 г., с. 28, рис. 1.20) - прототип.
Недостатками указанного манипулятора являются:
1. Сложная конструкция и система управления, требующая для подъема грузовой платформы одновременного согласованного привода всех шести приводных гидроцилиндров.
2. Большие габариты в нерабочем положении, затрудняющие складирование и доставку манипулятора, например, в космос на МКС (что требует его предварительной и трудоемкой разборки и сборки всех сложных узлов кинематической цепи манипулятора).
3. При нарушении согласованной работы всех шести приводных гидроцилиндров опорных ног возникает неизбежный угловой перекос грузовой платформы с длинномерным грузом, что нарушает его заданную постоянную горизонтальную ориентацию.
4. Ограниченная малая высота подъема грузовой платформы, равная только ограниченному гидроцилиндрами ходу их поршней при раздвигании стержневых опор ног.
5. Нельзя реализовать двухкоординатное перемещение и подъем длинномерного груза без его углового раскачивания.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции и системы управления, снижении габаритов и компактности в нерабочем положении (без разборки узлов манипулятора), многократном увеличении высоты подъема и хода грузовой платформы (при заданном перемещении приводного гидроцилиндра), а также в обеспечении двухкоординатного подъема и перемещения длинномерных и крупногабаритных грузов при гарантированном постоянстве их, например, горизонтальной ориентации во всем рабочем пространстве.
Получение технического результата достигается за счет того, что замкнутая кинематическая цепь грузоподъемного манипулятора выполнена в виде установленного на опорном основании параллелограммного механизма, кривошипы которого сблокированы с многократно соединенными между собой шарнирными ромбами, образующими параллельные между собой сборки пересекающихся трехшарнирных соединительных рычагов для привода грузовой платформы.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5 и фиг. 6.
На фиг. 1 представлен общий вид и рабочее положение складывающегося грузоподъемного манипулятора параллельной структуры, содержащего опорное основание 1 и подвижную грузовую платформу 13 с грузом 15, которые связаны между собой посредством замкнутой кинематической цепи из рычажных звеньев и цилиндрических шарниров с параллельными осями вращения. Упомянутая замкнутая кинематическая цепь выполнена в виде установленного на опорном основании 1 двухкривошипного параллелограммного механизма O1ABO2, кривошип 2 и 3 которого взаимосвязаны через шатун 4 и сблокированы с последовательно установленными и многократно соединенными между собой одинаковыми шарнирными ромбами, составленными из пересекающихся между собой трехшарнирных соединительных рычагов 5 и 6, 7 и 8, 9 и 10, 11 и 12 с расположением в каждом из них всех трех шарниров O3,O4,Os (для рычага 5) и шарниров O7,O4,O6 (для рычага 6) на одной прямой линии O3O5 (для рычага 5) и на линии O6O7 (для рычага 6). Все трехшарнирные соединительные рычаги выполнены одинаковой длины  , равной
, равной  и образуют параллельные между собой сборки, одна из которых составлена из рычагов 5 и 6, 7 и 8, и также двухшарнирного звена EO9 длиной
и образуют параллельные между собой сборки, одна из которых составлена из рычагов 5 и 6, 7 и 8, и также двухшарнирного звена EO9 длиной  а другая сборка составлена из рычагов 9 и 10, 11 и 12 с двухшарнирным звеном GH длиной
а другая сборка составлена из рычагов 9 и 10, 11 и 12 с двухшарнирным звеном GH длиной 
Шатун 4 параллелограммного механизма O1ABO2 и грузовая платформа 13 выполнены в виде четырехшарнирных соединительных рычагов с расположением у них всех четырех шарниров A,O7,B,C (для рычага 4) и шарниров D,E,F,G (для грузовой платформы 13) на одной прямой линии АС (для шатуна 4) и линии DG (для грузовой платформы 13), а упомянутые четырехшарнирные соединительные рычаги сблокированы с раздельными сборками шарнирных ромбов. Противоположно расположенные стороны параллелограммного механизма O1ABO2 выполнены одинаковой длины, равной О1А=BO2 и O1O2=АВ. Манипулятор на фиг. 1 снабжен поворотной платформой 14, выполненной с возможностью полного реверсивного поворота от вращательного двигателя, а опорное основание 1 установлено на упомянутой поворотной платформе 14. Двухкривошипный параллелограммный механизм O1ABO2 снабжен приводной вращательной кинематической парой O1, расположенной на опорном основании 1 - между ним и кривошипом 2 и выполненной с приводом от вращательного двигателя.
На фиг. 2 представлен грузоподъемный манипулятор в складывающемся (без разборки его замкнутой кинематической цепи) нерабочем положении, где для перехода в рабочее положение (на фиг. 1) не требуется повторная сборка его кинематической цепи.
На фиг. 3 представлено двухкоординатное линейное перемещение грузовой площадки 13 с грузом 15 (подъем по оси у и горизонтальное смещение по оси х), происходящее с точным сохранением ее заданной горизонтальной ориентации вместе с расположенным на ней грузом.
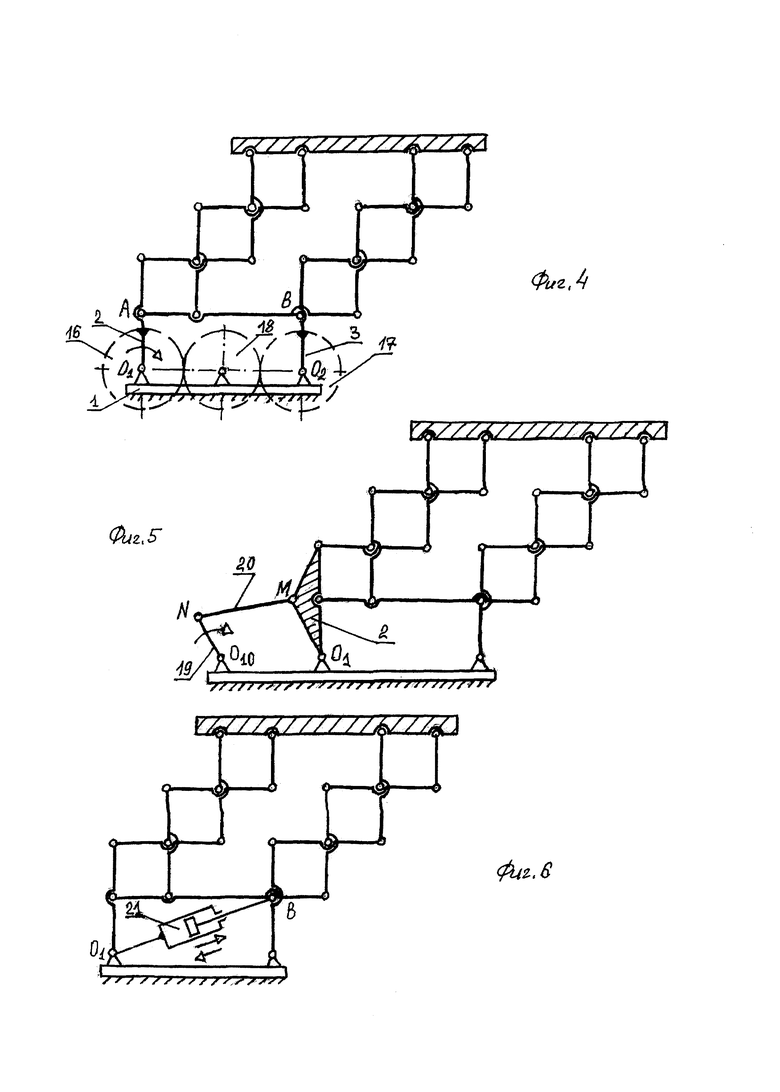
На фиг. 4 представлен вариант выполнения складывающегося грузоподъемного манипулятора параллельной структуры, привод которого выполнен в виде раздельно сблокированных с кривошипами 2 и 3 параллелограммного механизма O1ABO2 двух зубчатых колес 16 и 17 с одинаковым числом зубьев (Z16=Z17), которые связаны между собой через установленное на опорном основании 1 промежуточное зубчатое колесо 18, а колесо 16 выполнено с приводом от вращательного двигателя.
На фиг. 5 представлен вариант выполнения складывающегося грузоподъемного манипулятора параллельной структуры, привод которого выполнен в виде кривошипно-шатунного механизма, кривошип 19 которого выполнен меньшей длины O10N по сравнению с длиной O1M кривошипа 2 параллелограммного механизма (O10N<O1M), а его шатун 20 шарнирно соединен с кривошипом 2 упомянутого параллелограммного механизма.
На фиг. 6 представлен вариант выполнения складывающегося грузоподъемного манипулятора параллельной структуры, в котором двухкривошипный параллелограммный механизм снабжен приводной поступательной кинематической парой, выполненной в виде подвижного гидроцилиндра или пневмоцилиндра 21, установленного по диагонали упомянутого параллелограммного механизма и соединенного с ним через два двойных цилиндрических шарнира с осями O1 и В.
Работа представленного складывающегося грузоподъемного манипулятора параллельной структуры заключается в следующем.
Заданное движение ведущего звена манипулятора (на фиг. 1-6 показано стрелкой) преобразуется в угловой поворот обоих кривошипов параллелограммного механизма, что приводит к согласованному многократному вытягиванию (или, наоборот сжатию) всех шарнирных ромбов и соответствующему подъему (или опусканию) грузоподъемной платформы при точном сохранении ее горизонтальной ориентации.
Достигаемый в предлагаемом манипуляторе параллелей структуры положительный эффект заключается в упрощении конструкции и ее сборки (за счет применения простых цилиндрических шарниров и всех одинаковых шарнирных ромбов), упрощении системы управления (за счет привода только от одного двигателя), многократном увеличении хода грузовой платформы по сравнению с ходом поршня гидроцилиндра (равном числу шарнирных ромбов) при сохранении заданной горизонтальной ориентации длинномерного груза, а также возможности его быстрого и легкого складывания и раскладывания без его разборки и сборки для компактности в нерабочем положении при его транспортировке.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ ПОДЪЕМНИК ПОДВЕСНОГО ГРУЗА | 2021 |
|
RU2770954C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2728851C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |

Изобретение относится к робототехнике и может быть использовано в сборочных стендах, шахтных подъемниках и механизмах подачи боеприпасов, установках запуска беспилотников и подъемниках, преимущественно длинномерных грузов. Манипулятор содержит опорное основание и подвижную грузовую платформу, связанные между собой посредством замкнутой приводной кинематической цепи, выполненной в виде двухкривошипного параллелограммного механизма, сблокированного с многократно соединенными между собой шарнирными ромбами, образующими параллельные между собой сборки пересекающихся трехшарнирных соединительных рычагов для привода грузовой платформы. Изобретение обеспечивает при сохранении заданной горизонтальной ориентации длинномерных грузов компактность манипулятора в нерабочем положении без его разборки и сборки при транспортировке и хранении. 6 з.п. ф-лы, 6 ил.
1. Складывающийся грузоподъемный манипулятор параллельной структуры, преимущественно для двухкоординатного перемещения длинномерных грузов, содержащий опорное основание и подвижную грузовую платформу, которые связаны между собой посредством приводной замкнутой кинематической цепи из рычажных звеньев и цилиндрических шарниров с параллельными осями вращения, отличающийся тем, что замкнутая кинематическая цепь выполнена в виде установленного на опорном основании двухкривошипного параллелограммного механизма, кривошипы которого взаимосвязаны через шатун и сблокированы с последовательно установленными и многократно соединенными между собой одинаковыми шарнирными ромбами, составленными из пересекающихся между собой трехшарнирных соединительных рычагов с расположением в каждом из них всех трех шарниров на одной прямой линии, а упомянутые шарнирные ромбы образуют параллельные между собой сборки упомянутых трехшарнирных соединительных рычагов длиной  замыкаемых на грузовую платформу посредством двухшарнирных рычагов длиной
замыкаемых на грузовую платформу посредством двухшарнирных рычагов длиной 
2. Манипулятор по п. 1, отличающийся тем, что шатун параллелограммного механизма и грузовая платформа выполнены в виде четырехшарнирных соединительных рычагов с расположением на каждом из них всех четырех шарниров на одной прямой линии, а упомянутые четырехшарные соединительные рычаги сблокированы с раздельными сборками шарнирных ромбов.
3. Манипулятор по п. 1, отличающийся тем, что двухкривошипный параллелограммный механизм снабжен приводной вращательной кинематической парой, расположенной на опорном основании между ним и одним из кривошипов и выполненной с приводом от вращательного двигателя.
4. Манипулятор по п. 1, отличающийся тем, что привод манипулятора выполнен в виде раздельно сблокированных с кривошипами параллелограммного механизма двух зубчатых колес с одинаковым числом зубьев, которые связаны между собой через установленное на опорном основании промежуточное зубчатое колесо, а одно из упомянутых двух зубчатых колес выполнено с приводом от вращательного двигателя.
5. Манипулятор по п. 1 или 2, отличающийся тем, что привод манипулятора выполнен в виде установленного на опорном основании кривошипно-шатунного механизма, кривошип которого выполнен меньшей длины по сравнению с длиной кривошипа параллелограммного механизма, а его шатун шарнирно соединен с одним из кривошипов параллелограммного механизма.
6. Манипулятор по п. 1 или 2, отличающийся тем, что двухкривошипный параллелограммный механизм снабжен приводной поступательной кинематической парой, выполненной в виде подвижного гидроцилиндра или пневмоцилиндра, установленного по диагонали упомянутого параллелограммного механизма и соединенного с ним через два двойных цилиндрических шарнира.
7. Манипулятор по любому из пп. 1-6, отличающийся тем, что он снабжен поворотной платформой, выполненной с возможностью полного реверсивного поворота от вращательного двигателя, а опорное основание установлено на упомянутой поворотной платформе.
| Механизм прямолинейного перемещения объекта | 1988 |
|
SU1576315A1 |
| Манипулятор | 1983 |
|
SU1093540A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1050861A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КОЛЕС ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2153946C2 |

