Изобретение относится к машиностроению и может быть использовано в качестве планетарного распределителя момента для привода винтов противоположного вращения.
Целью изобретения является выравнивание частот вращени.я контрвращающихся валов и повышение передаточного отношения распределителя путем выбора рациональной кинематической схемы.
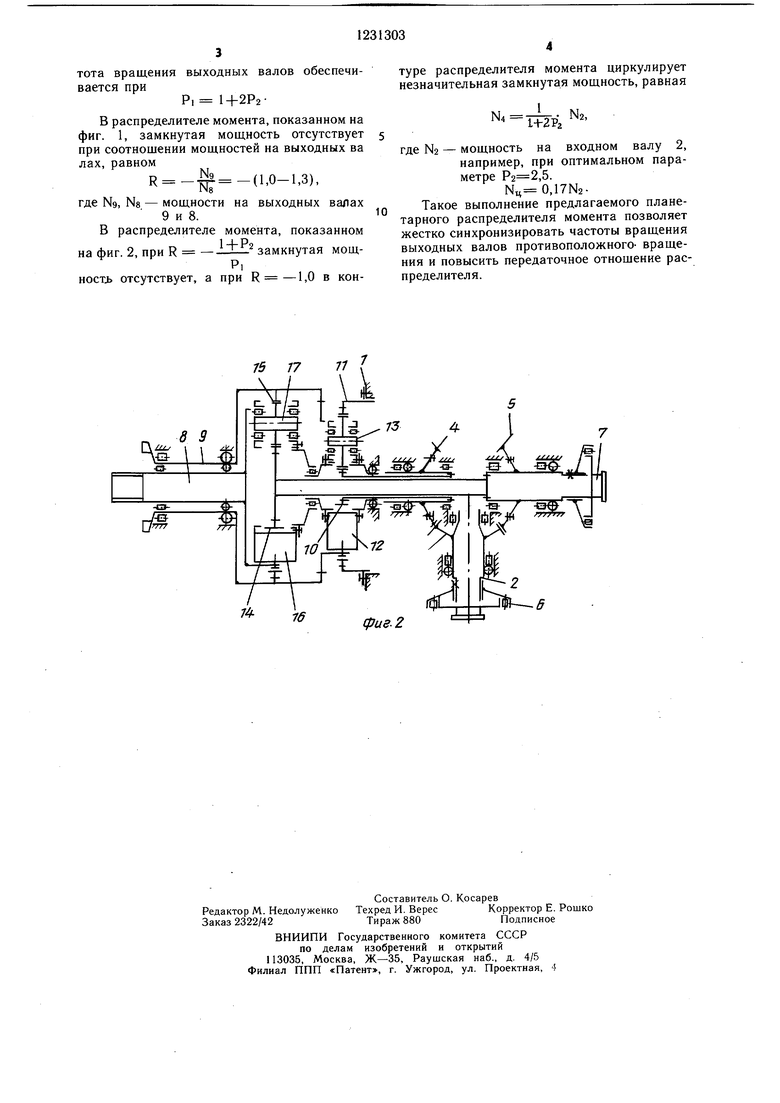
На фиг. 1 показана кинематическая схема планетарного распределителя момента; на фиг. 2 - то же, вариант выполнения.
Планетарный распределитель момента (фиг. 1) содержит корпус 1, входной вал 2 с ведушим коническим колесом 3, взаимодей- ствуюш,ие с последним два ведомых конических колеса 4 и 5, два двигателя (не показаны), две муфты свободного хода 6 и 7, посредством которых входной вал 2 и ведомое коническое колесо 5 связаны с со- ответствуюш,ими двигателями (не показаны), два коаксиальных выходных вала 8 и 9 и два планетарных механизма, первый из которых включает три основных звена: центральное колесо 10 с наружными зубьями, центральное колесо 11 с внутренними звеньями и водило 12 с сателлитами 13. Второй планетарный механизм также включает три основных звена: центральное колесо 14 с наружными зубьями, центральное колесо 15 с внутренними зубьями и водило 16 с сателлитами 17. Центральные колеса 10 и 14 соединены соответственно с ведомыми коническими колесами 4 и 5, водило 16 второго планетарного механизма - с выходным валом 8, центральное колесо 15 - с выходным валом 9, центральное колесо 11 первого планетарного механизма заторможено на корпус 1, а водило 12 соединено с центральным колесом 15.
Цланетарный распределитель момента по фиг. 2 отличается от описанного тем, что в первом планетарном механизме водило 12 заторможено на корпусе 1, а центральное колесо 11 соединено с водилом 16 второго планетарного механизма.
Планетарный распределитель момента по фиг. 1 работает следующим образом.
При работе обоих двигателей (не показаны), имеющих разное направление вращения мощности двумя параллельными по- токам и муфты 6 и 7 свободного хода передаются на ведущие коническое колесо 3 и ведомые конические колеса 4 и 5, а от них - центральным колесам 10 и 14. Основная часть мощности передается через центральное колесо 14 и далее через водило 16 и центральное колесо 15 на выходные валы 8 и 9 противоположного вращения, незначительная часть мощности от центрального колеса 10 передается на водило 12 и далее через центральное колесо 15 к выходному валу 9. Первый планетарный механизм, играющий роль синхронизатора, через водило 12,
5
0
5
соединенное с центральным колесом 15, обеспечивает противоположное вращение выходных валов 8 и 9 с одинаковой частотой независимо от величины внешней нагрузки на них. Кроме того, водило 12 передает через центральное колесо 15 часть мощности на выходной вал 9, чем обеспечивается равномерное распределение мощности между выходными валами 8 и 9.
При работе от двигателя, связанного муфтой 7 свободного хода с ведомым коническим колесом 5, мощность от последнего двумя неравномерными потоками поступает непосредственно к центральному колесу 14 и через ведущее 3 и ведомое 4 колеса- к центральному колесу 10, далее аналогично описанному.
При этом муфта 6 свободного хода отключает неработающий в этом случае второй двигатель. При работе от двигателя, связанного с муфтой свободного хода 6, мощность двумя неравномерными потоками поступает через ведущее колесо 3 и ведомые колеса 4 и 5 к центральным колесам 10 и 14 и далее аналогично описанному. При этом муфта 7 свободного хода отключает связанный с ней двигатель.
Работа планетарного распределителя момента, показанного на фиг. 2, осуществляется так же, за исключением того, что водило 12 первого планетарного механизма зоторможено на корпус 1, а центральное колесо 11 соединено с водилом 16, чем обеспечивается противоположное вращение выходных валов 8 и 9 с одинаковой частотой вращения.
В планетарном распределителе момента, показанном на фиг. 1, противоположное вращение выходных валов с одинаковой частотой независимо от внешней нагрузки на выходных валах обеспечивается при параметрах
PI 2Р2,
гдеР,
i.10
/14
Zio; Zii; ZK; Zis - числа зубьев центральных
колес 10, 11, 14 и 15. Передаточное отношение планетарных механизмов равно U ±(l-f2P2), а обшее передаточное отношение составляет
0
5
0
5
0
55 где Zs и Z4 - числа зубьев ведущего 3 и ведомого 4 колес.
Для планетарного распределителя момента, показанного на фиг. 2, одинаковая частота вращения выходных валов обеспечивается при
Р, 1+2Р2В распределителе момента, показанном на фиг. 1, замкнутая мощность отсутствует при соотношении мощностей на выходных ва лах, равном
R (1.0-l,3),
iNg
где Ng, Ng - мощности на выходных валах
9 и 8. В распределителе момента, показанном
на фиг. 2, при R - llt замкнутая мощPIност.ь отсутствует, а при R -1,0 в контуре распределителя момента циркулирует незначительная замкнутая мощность, равная
N4
1
1+2Р2
N2,
Рде № - мощность на входном валу 2, например, при оптимальном параметре ,5.
,17Ы2Такое выполнение предлагаемого планетарного распределителя момента позволяет жестко синхронизировать частоты вращения выходных валов противоположного- вращения и повысить передаточное отношение распределителя.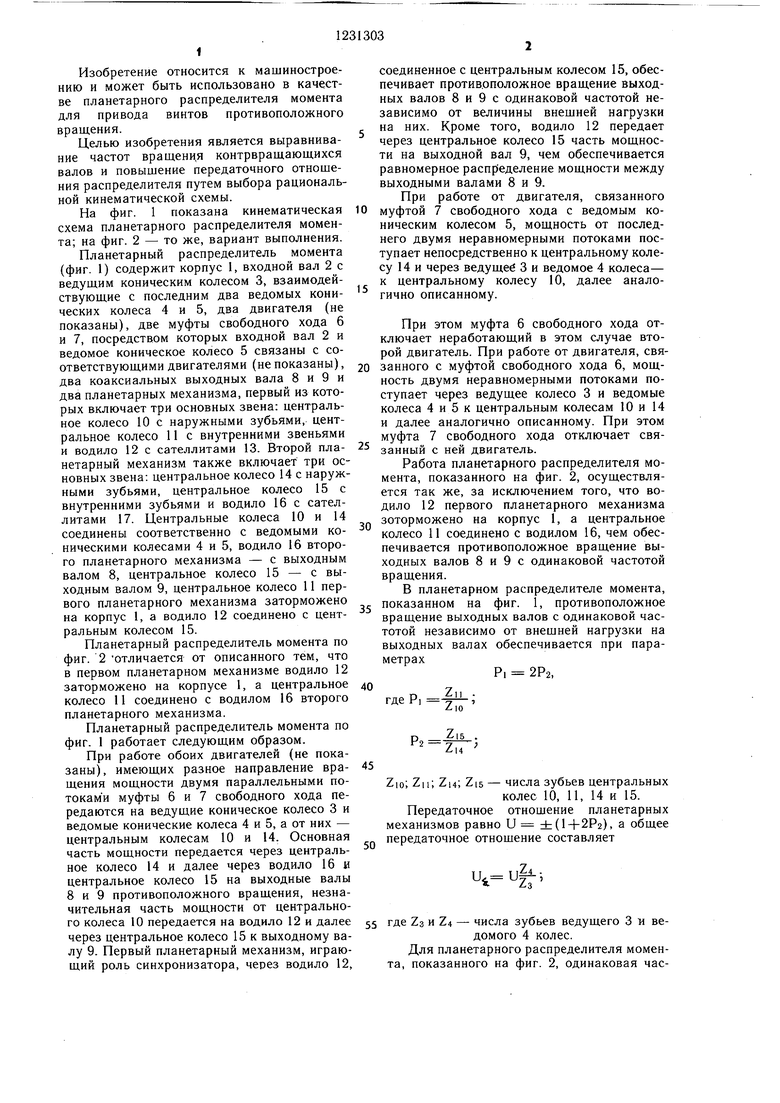
| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарный распределитель момента | 1984 |
|
SU1188407A2 |
| Планетарный распределитель момента | 1984 |
|
SU1222950A1 |
| КИНЕМАТИЧЕСКАЯ СХЕМА ГЛАВНОГО РЕДУКТОРА ВЕРТОЛЕТА | 1992 |
|
RU2089454C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С МУСКУЛЬНЫМ ДВИГАТЕЛЕМ | 1992 |
|
RU2033367C1 |
| ПЕРЕДАТОЧНОЕ УСТРОЙСТВО | 1991 |
|
RU2114345C1 |
| ГЛАВНЫЙ РЕДУКТОР ВЕРТОЛЕТА | 1993 |
|
RU2065381C1 |
| Трансмиссия гусеничной машины | 1988 |
|
SU1527072A1 |
| СПОСОБ УПРАВЛЕНИЯ ГУСЕНИЧНОЙ МАШИНОЙ | 2024 |
|
RU2835218C1 |
| ТРАНСМИССИЯ ВНЕДОРОЖНЫХ МАШИН, ПРЕИМУЩЕСТВЕННО ТРАКТОРОВ | 1999 |
|
RU2162799C2 |
| Планетарный распределитель момента | 1983 |
|
SU1097846A2 |
77
77 (
i
и
с. з
-о 1
ST
qjue.Z
У
/ л
-в©- J 43
| Планетарный распределитель момента | 1983 |
|
SU1097846A2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
