1
Изобретение относится к области неразрушающего контроля металлов с помощью ультразвука и может быть использовано, например, при контроле кромок, полос и листов.
Целью изобретения является повышение надежности и чувствительности преобразователя путем уменьшения числа оборотов колес и, следовательно, повьшения их долговечности за счет уменьшения удельных наг рузок, стабилизации зазора между высокочастотной катушкой и контролируемым изделием, создания двух равночувствитель- ных излучателей-приемников, а также за счет увеличения количества ампер- витков катушки индуктивности.
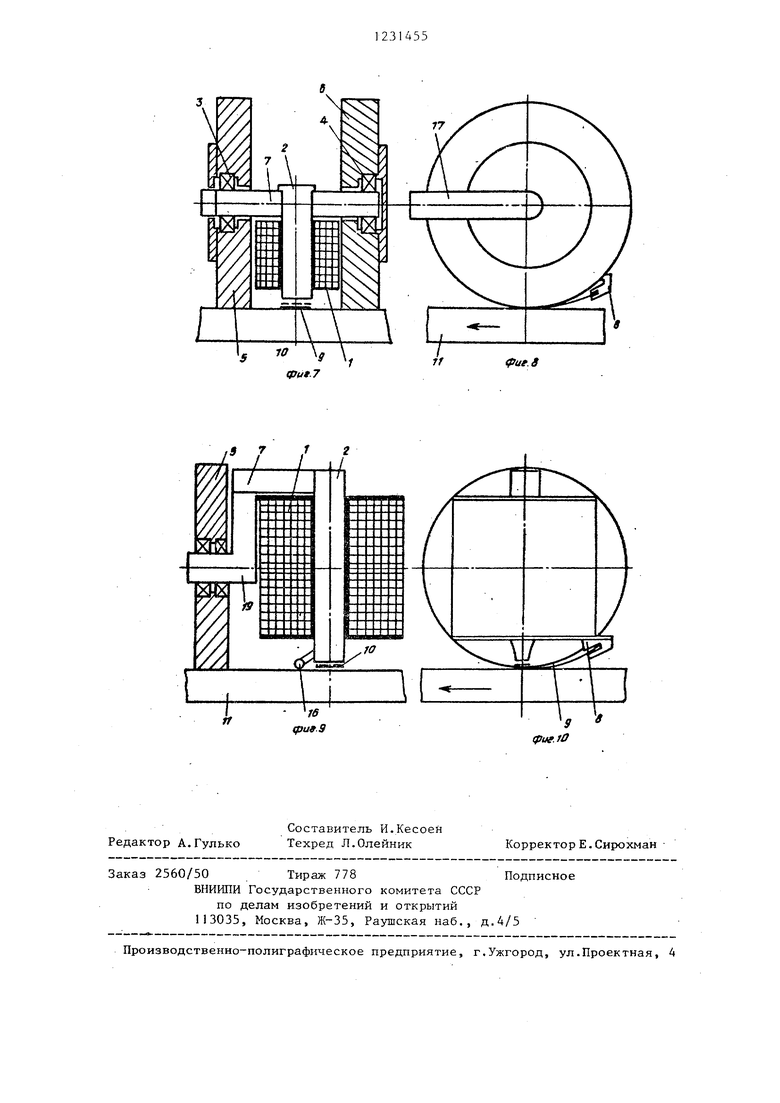
На фиг.1 изображен электромагнитно-акустический (ЭМЛ) преобразователь для контроля листов и кромок, сечение, вариант; на фиг. 2 - то же, вид сбоку; на фиг. 3 - двухканальный преобразователь, другая модернизация первого варианта; на фиг. 4 - то же, вид сбоку; на фиг. 5 - преобразователь для.контроля кромок, второй вариант; на фиг. 6 - то же, вид сбоку; на фиг, 7 - преобразователь двухко- лесньш для контроля центральной части листа, второй вариа}1т; на фиг. 8 - то же, вид сбоку; на фиг. 9 - преобразователь для контроля кромок, третий вариант; на фиг. 10 - то же, вид сбоку.
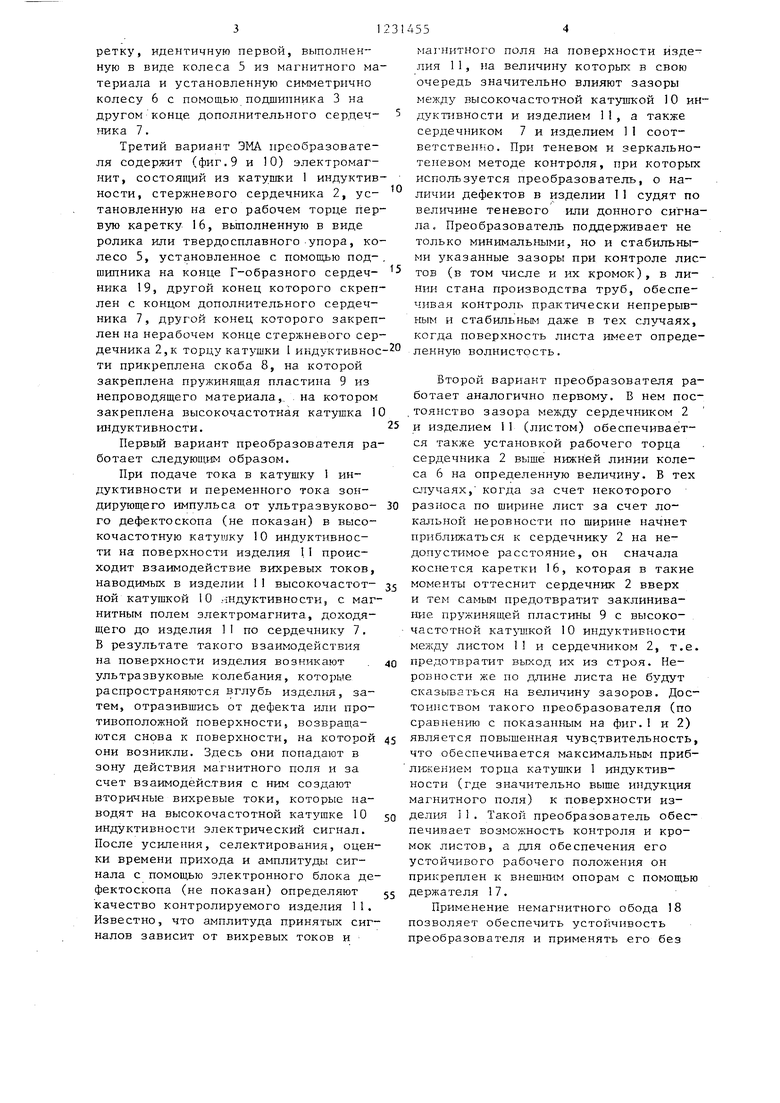
Первьш вариант ЭМА преобразователя (фиг. и 2) содержит электромагнит, в который входит катушка I индуктивности и вставленный в нее стерж евой сердечник 2, на концах которого с помош,ью подшипников 3 и 4 установлены колеса 5 и 6 из немагнитного материала, при этом колеса 5 и 6 сов- мес Лю с сердечником 2 образуют каретку электромагнита, к торцу сердечника 2 прикреплен одним концом дополнительный сердечник 7, к в:оторому i прикреплена скоба 8, на другом конце скобы 8 закреплен конец упругого элемента 9, выполненного в виде упругой пластины из непроводящего материала, например из стеклотекстолита толшз ной 0,2-0,6 мм, на другом конце пластины 9 установлена высокочастотная катушка 10 индуктивности. Другой конец дополнительного сердечника 7 направлен в сторону контролируемого изделия 1 и находится от него на расстоянии нескольких миллиметров. Плас
10
20
1455
тина 9 укреплена под таким углом к поверхности изделия 11 и имеет такую /длину, что катушка 10 находится под торцом сердечника 7. Стрелка показьг- 5 вает направление движения контролируемого изделия 1.
Возможна модификация преобразователя, в котором колесо 5 выполнено из магнитного материала.
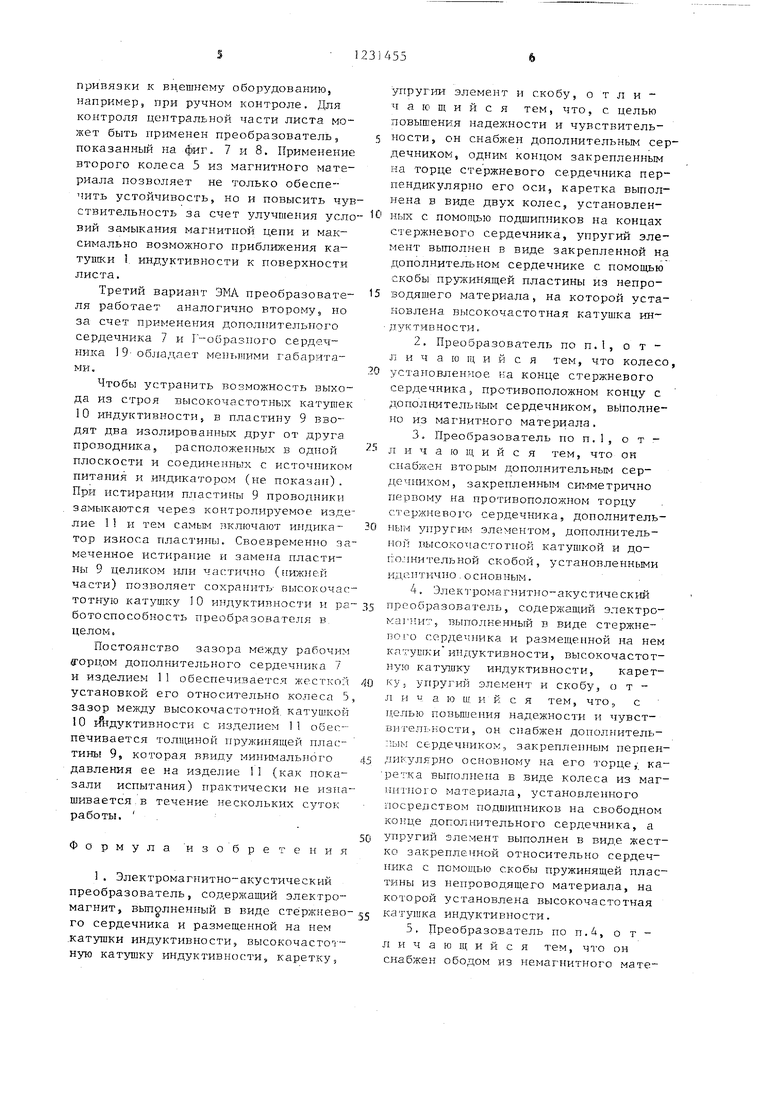
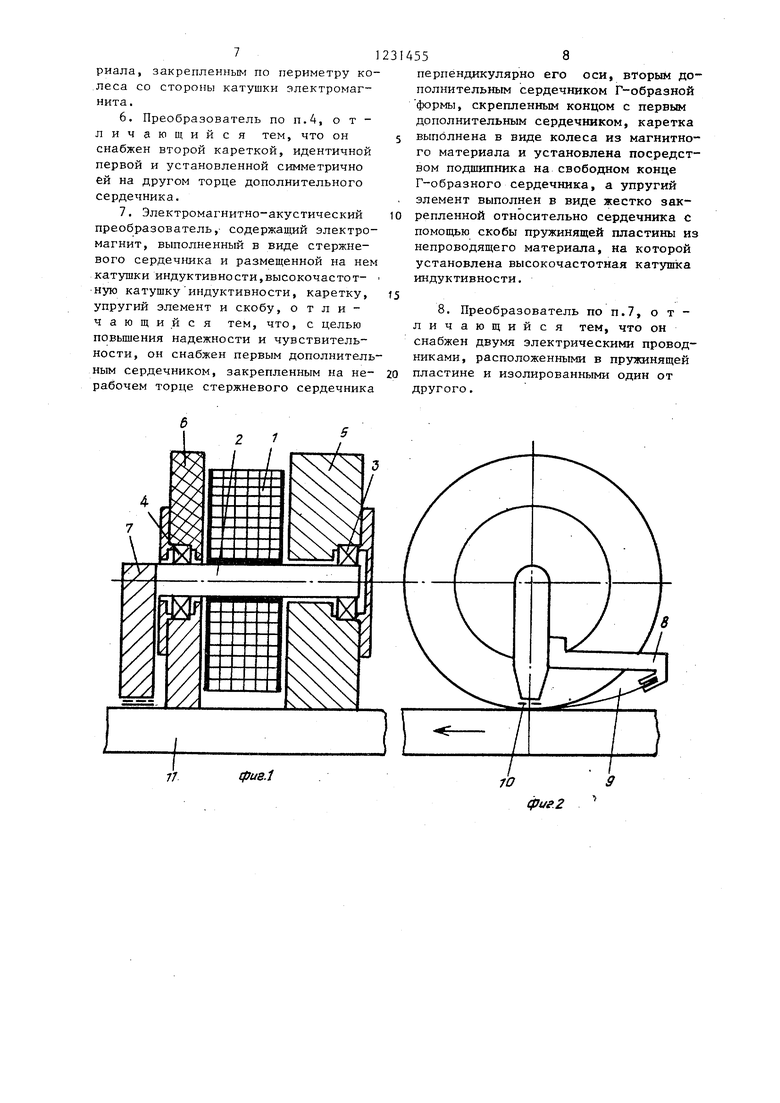
Возможна также вторая модификация преобразователя (фиг. 3 и 4), которая содержит второй дополнительный сердечник 12, установленный симметрично первому дополнительному сердеч- нику 7 на противоположном торце
стержневого сердечника 2, а также дополнительный упругий элемент 13, дополнительную высокочастотную катушку 14, дополнительную скобу 15, которые установлены относительно второго дополнительного сердечника 12 аналогично установке основных этих элементов 8, 9 и 10, относительно сердечника 7. В этом случае колеса 5 и 6 должны быть из немагнитного материала.
Второй вариант ЭМА преобразователя (фиг.5 и 6) содержит электромаг-. нит, в который входит катушка 1 ин- 30 дуктивности и вставленньй в нее
стержневой сердечник 2, установленную на рабочем торце сердечника 2 каретку 16, вьшолненную в виде ролика либо упора из твердосплав- 35 ного материала, дополнительный сердечник 7, через отверстие в котором проходит стержневой сердечник 2, колесо 6, выполненное из магнитного материала и установленное с помощью 40 подшипников 3 и 4 на конце дополнительного серд;ечника 7, закрепленную на торца катушки I скобу 8, укрепленный на скобе 8 упругий элемент 9, выполненр ый в виде пружинящей пластины из непроводящего материала,. установленную на пластине (под рабочим торцом сердечника 2) катушку 10 индуктивности, укрепленный на торце сердечника 7 держатель 17.
Модификацией такого преобразователя является преобразователь, в котором )зведен обод 18 из немагнитного материала, расположенный по торцу периметра колеса со стороны катущкн 1 индуктивности и соединенный с ним, например, сваркой.
Вторая модификация преобразователя (фиг. 7 и 8) содержит вторую ка45
50
55
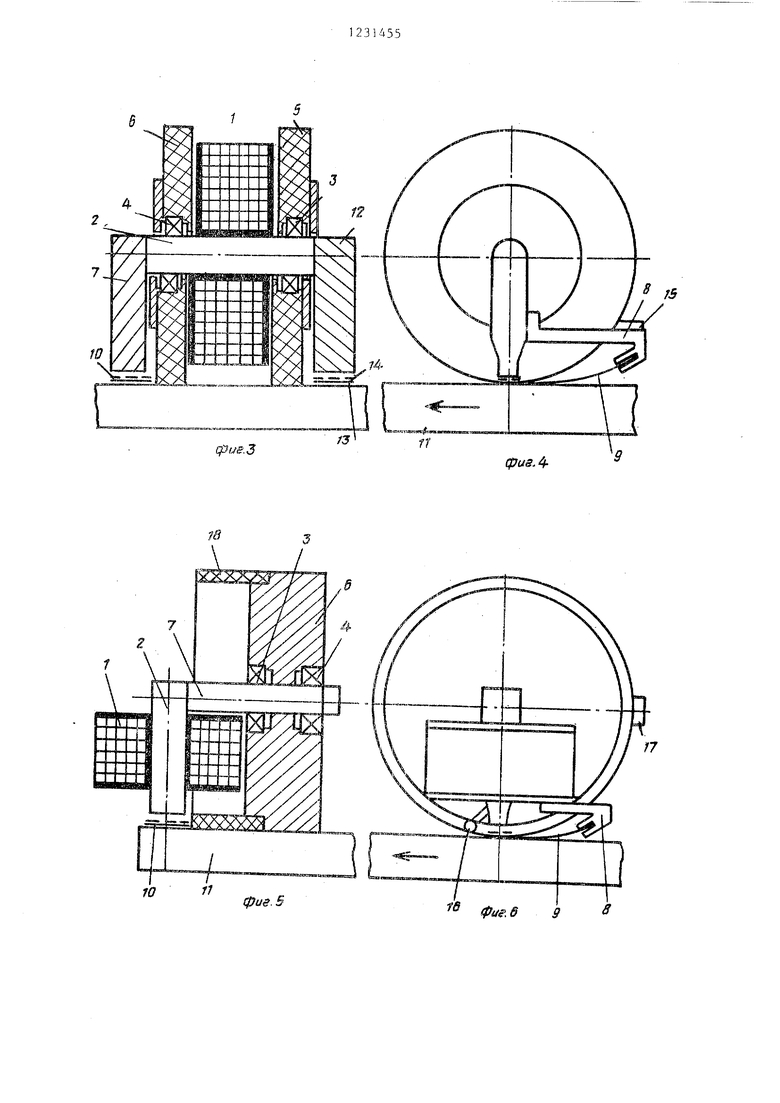
ретку, идентичную первой, выполненную в виде колеса 5 из магнитного материала и установленную симметрично колесу 6 с помощью подшипника 3 на другом конде дополнительного сердеч- ника 7.
Третий вариант ЭМА преобразователя содержит (фиг.9 и 10) электромагнит, состоящий из катушки 1 индуктив- ности, стержневого сердечника 2, установленную на его рабочем торце первую каретку 16, выполненную в виде ролика или твердосплавного .упора, колесо 5, установленное с помощью подшипника на конце Г-образного сердеч- ника 19, другой конец которого скреплен с концом дополнительного сердечника 7, другой конец которого закреплен на нерабочем конце стержневого сердечника 2,к торцу катушки 1 индуктивное ти прикреплена скоба 8, на которой закреплена пружинящая пластина 9 из непроводящего материала,, - на котором закреплена высокочастотная катушка 10 индуктивности.
Первый вариант преобразователя работает следующим образом.
При подаче тока в катушку 1 индуктивности и переменного тока зондирующего импульса от ультразвуково- го дефектоскопа (не показан) в высо- кочастотьгую катушку 10 индуктивности на поверхности изделия 1I происходит взаимодействие вихревых токов, наводимых в изделии 11 высокочастот- ной катушкой 10 индуктивности, с магнитным полем электромагнита, доходящего до изделия 11 по сердечнику 7. В результате такого взаимодействия на поверхности изделия возникают . ультразвуковые колебания, которые распространяются вглубь издельш, затем, отразившись от дефекта или противоположной поверхности, возвращаются снова к поверхности, на которой они возникли. Здесь они попадают в зону действия магнитного поля и за счет взаимодействия с ним создают вторичные вихревые токи, которые наводят на высокочастотной катушке 10 индуктивности электрический сигнал. После усиления, селектирования, оценки времени прихода и амплитуды сигнала с помощью электронного блока дефектоскопа (не показан) определяют качество контролируемого изделия 11. Известно, что амплитуда принятых сигналов зависит от вихревых токов и
магнитного поля на поверхности изделия 11, на величину которых в свою очередь значительно влияют зазоры между высокочастотной катушкой 10 индуктивности и изделием 11, а также сердечником 7 и изделием 11 соот- ветственью. При теневом и зеркально- теневом методе контроля, при которых используется преобразователь, о наличии дефектов в изделии 11 судят по величине теневого или донного сигнала. Преобразователь поддерживает не только минимальными, но и стабильными указанные зазоры при контроле листов (в том числе и их кромок), в линии стана производства труб, обеспечивая контроль практически непрерывным и стабильным даже в тех случаях, когда поверхность листа имеет определенную волнистость.
Второй вариант преобразователя работает аналогично первому. В нем постоянство зазора между сердечником 2 и изделием 11 (листом) обеспечивается также установкой рабочего торца сердечника 2 выше нижней линии колеса 6 на определенную величину. В тех случаях, когда за счет некоторого разноса по ширине лист за счет локальной неровности по ширине начнет приближаться к сердечнику 2 на не- допз стимое расстояние, он сначала коснется каретки 16, которая в такие моменты оттеснит сердечник 2 вверх и тем самым предотвратит заклинивание пружинящей пластины 9 с высокочастотной кат тлкой 10 индуктивности мелсду листом 1 и сердечником 2, т.е. предотвратит вькод их из строя. Неровности же по длине листа не будут сказьгоаться на величину зазоров. Достоинством такого преобразователя (по сравненик с показан11ым на фиг.1 и 2) является повышенная чувствительность, что обеспечивается максимальным приб- лккением торца катушки 1 индуктивности (где значительно выше индукция магнитного поля) к поверхности изделия 1. Такой преобразователь обеспечивает возможность контроля и кромок листов, а для обеспечения его устойчивого рабочего положения он прикреплен к внешним опорам с помощью держателя 17.
Применение немагнитного обода 18 позволяет обеспечить устойчивость преобразователя и применять его без
привязки к внешнему оборудованию, например, при ручном контроле. Для контроля центральной части листа может быть Г1ри 1енен преобразователь, показанный на фиг. 7 и 8. Применение второго колеса 5 из магнитного материала позволяет не только обеспечить устойчивость, но и повысить чувствительность за счет улучшения условий замыкания магнитной цепи и максимально возможного приближения катушки I индуктивности к поверхности листа.
Третий вариант ЭМА преобразователя работает аналогично второму, но за счет применения дополнительного сердечника 7 и Г-образного сердечника 1 9- обладает менГ)Т1Гими габаритами,
Чтобы устранить возможность выхода из строя высокочастотных катушек 10 индуктивности, в пластину 9 вво-- дят два изолированных друг от друга проводника, расположенных в одной плоскости и соединенных с источником питания и индикатором (не показан). При истирании пластины 9 проводники замыкаются через контролируемое изделие 11 и тем самым /жлючают иицика- тор износа пластины. Своевременно замеченное истирание и замена нласти- ны 9 целиком итт частично (нижней части) позволяет сохраннть высокочас TOTi-гую катушку 10 индуктивности и работоспособность преобразователя в целом.
Постоянство зазора между рабочим «гордом дополнительного сердечника 7 и изделием 11 обеспечивается жесткой установкой его относительно колеса 5 зазор между высокочастотной, катуапчой 10 Асдуктивности с изделием И обеспечивается толщиной нру}кинящей нлас- тины 9, которая ввиду минрмального давления ее на изделие 1 (как показали испытания) практически не изнашивается, в течение нескольких суток работы.
Формула изобретения
1. Электромагнитно-акустический преобразователь, содержащий электромагнит, выполненный в виде стержневого сердечника и размещенной на нем .катушки индуктивности, высокочасто - ную катушку индуктивности, каретку.
упругий элемент и скобу, о т л и ч а ю щ и и с я тем, что. с целью :повыш:ения надежности и чувствительности, он снабжен дополнительным сердечником, одним концом закрепленным на горце стержневого сердечника перпендикулярно его оси, каретка выполнена в виде двух колес, установленных с помощью подшипников на концах стержневого сердечника, упругий элемент выполнен в виде закрепленной на дополнител:ьном сердечнике с помогцью скобы пру/кинящей пластины из непровoдяпJeгo материала, на которой установлена высокочастотная катушка ин
ДУКТИВНОСТИ.
2.Преобразователь по п.1, о т л и ч а ю га, и и с я тем, что колесо, установленное ка конце стержневого сердечника, противоположном концу с до по л -И тельным сердечником, вьгполне- но из магнитного материала.
3,Преобразователь по п. 1, о т 25
л и ч а ю щ и и с я тем, что он
снабжен вторым дополнительным сер- д,ечником, закрепленным симметрично первому на противоположном торцу стержневого сердечника, дополнитель- ным упругим элементом, дополнительной высокочастотной катушкой и до- толнич ельной скобой, установленными идр.нтично. основным.
4.Электромагнитно-акустический преоб)азователь, содержащий электрокагнит, выполненный в виде стержне- лого сердеч}шка и размещенной на нем катупгки индуктивности, высокочастотную к 1 тушку индуктивности, каретку уг ругий элемент и скобу, о т - л и ч а ю щ и и с я тем, что, с целью повышения надежности и гувст- внтельностн, он снабжен дополнительным се-.рдечникох, закрепленным перпендикуля рно основному на его торце,- ка- ретка выполнена в виде колеса из маг- HHi Horo материала, установленного посредством подшипников на свободном конце дополнительного сердечника, а
упругий элемент выполнен в виде жестко закрепленной относительно сердечника с помощью скобы пружинящей пластины из непроводящего материала, на которой установлена высокочастотная
катушка индуктивности.
5,Преобразователь но п.4, о т - л и ч а ю щ и и с я тем, что он снабжен ободом из немагнитного мате7
риала, закрепленным по периметру ко- ,леса со стороны катушки электромагнита.
6.Преобразователь по п.4, отличающийся тем, что он снабжен второй кареткой, идентичной первой и установленной симметрично ей на другом торце дополнительного сердечника.
7,Электромагнитно-акустический преобразователь, содержащий электромагнит, выполненный в виде стержневого сердеч1шка и размещенной на нем катушки индуктивности,высокочастот-
ную катушку индуктивности, каретку, упругий элемент и скобу, отличающийся тем, что, с целью повьш1ения надежности и чувствительности, он снабжен первым дополнительным сердечником, закрепленным на нерабочем торце стержневого сердечника
314558
перпендикулярно его оси, вторым дополнительным сердечником Г-образной формы, скрепленным концом с первым дополнительным сердечником, каретка 5 выполнена в виде колеса из магнитного материала и установлена посредством подшипника на свободном конце Г-образного сердечника, а упругий элемент выполнен в виде жестко зак- 10 репленной относительно сердечника с помощью скобы пружинящей пластины из непроводящего материала, на которой установлена высокочастотная катушка индуктивности.
8. Преобразователь по п.7, о т - личающийся тем, что он снабжен двумя электрическими проводниками, расположенными в пружинящей пластине и изолированными один от другого.
tpije.3
Сриз.4
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитно-акустический преобразователь для ультразвукового контроля изделий | 1976 |
|
SU647596A1 |
| Электромагнитно-акустический преобразователь | 1986 |
|
SU1365622A1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2390014C1 |
| Датчик положения стыка кромок свариваемых деталей | 1980 |
|
SU872097A1 |
| Электромагнитно-акустический преобразователь | 1974 |
|
SU532048A1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| ЭЛЕКТРОМАГНИТНЫЙ АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СИСТЕМА УЛЬТРАЗВУКОВОГО КОНТРОЛЯ С ТАКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2009 |
|
RU2489713C2 |
| Преобразователь электромагнитно-акустического дефектоскопа | 1989 |
|
SU1707525A1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
Изобретение относится к области неразрушающего контроля металлов ультразвуком и может быть использовано, например, при контроле кромок, полос и листов. Целью изобретения является повьппение надежности преобразователя путем введения в конструкцию дополнительного сердечника, выполнения каретки в виде одного либо двух колес- с увеличенным на порядок диаметром колес, что приводит к пропорциональному уменьшению числа юс оборотов и, следовательно, повьшает их долговечность за счет уменьшения удельных нагрузок, а также размещения высокочастотной катушки на конце упругого элемента, выполненного в виде пружинящей пластины из электропроводящего материала. Первьй вариант изобретения, кроме того, по- вьшгает производительность и достоверность контроля, так как горизонтальное расположение катушки позволяет создать два равночувствительных излучателя - приемника. Второй и третий варианты позволяют также повысить чувствительность преобразователя за счет увеличения количества ам- первитков катушки индуктивности. Электромагнитно-акустический преобразователь содержит электромагнит, вы- полненньш в виде стержневого сердечника и размещенной на нем катушки индуктивности, высокочастотную катушку индуктивности, каретку, упругий элемент и скобу, а также дополнительный сердечник, одним концом закрепленный на торце стержневого сердечника перпендикулярно его оси. Каретка вьшолнена в виде двух колес, установленных с помощью подшипников на концах стержневого сердечника, упругий элемент вьтолнзн в виде закрепленной на дополнительном сердечнике с помощью скобы пружинящей плас тины из непроводящего материала, на которой установлена высокочастотная .катушка индуктивности. При этом колесо, установленное на конце стержневого сердечника, противоположном концу с дополнительным сердечником, выполнено из магнитного материала. Кроме того, электромагнитно-акустический преобразователь может содержать второй дополнительный сердечник, закрепленный симметрично первому на противоположном торце стержневого сердечника, дополнительный упругий эле,мент, дополнительную высокочастотную катушку и дополнительную скобу, :установленные идентично основным. 3 с.п. и 5 з.п.ф-лы, 10 ил. I (/) , А ;х 4 сд ел
10
фиг. В
I d
фа.6 9
рие.8
П
(pue.tO
Редактор А.Гулько
Составитель И.Кесоен Техред Л.Олейник
Заказ 2560/50 Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
- - -. - - - -, - - -.«..- «.,« - - - «.,-, - ,-.-«.
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проек тная, 4
Корректор Е. Сирохман
| Электромагнитно-акустический преобразователь для ультразвукового контроля изделий | 1976 |
|
SU647596A1 |
