Изобретение относится к устройствам для приведения в действие колесных транспортных средств мускульной силой человека, в частности к мускульным приводам, приводимым в движение мускульной силой человека посредством устройств одновременно ручного и ножного действия.
Цель изобретения - облегчение управления приводом путем создания в нем дополнительной энергии.
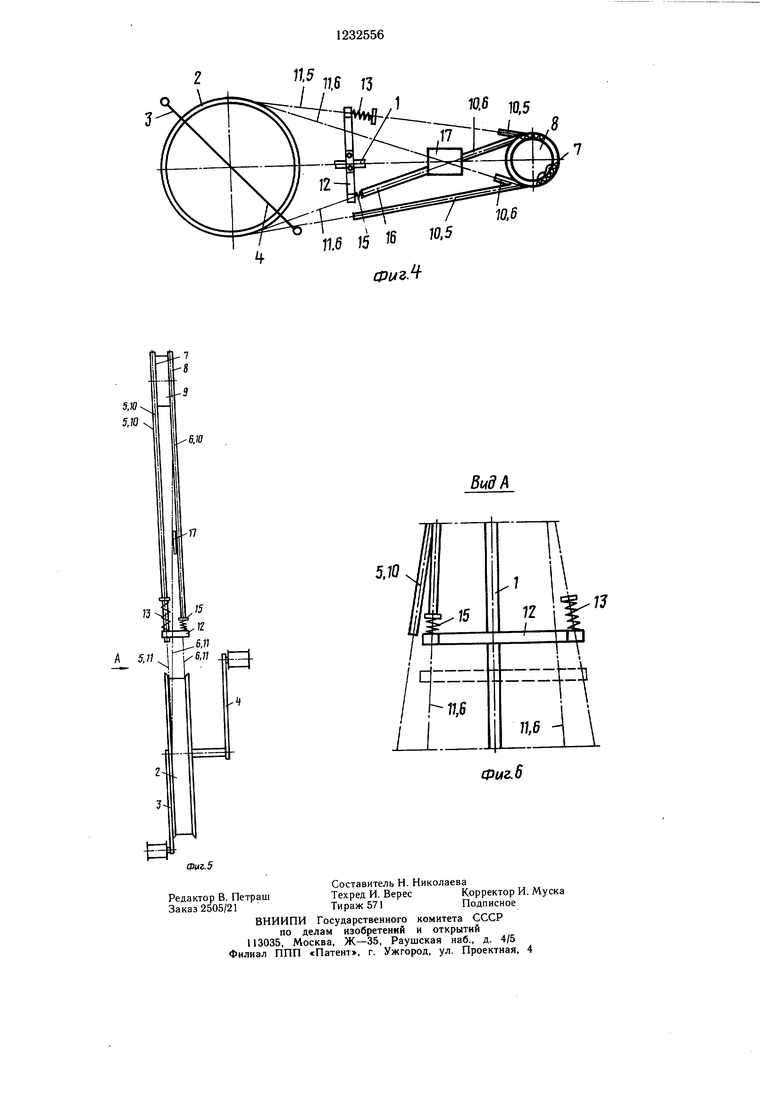
На фиг. I изображен мускульный привод с действием усилия на переднюю педаль; на фиг. 2 - то же, с действием усилия на заднюю педаль; на фиг. 3 - гибкие органы с амортизационными пружинами при воздействии усилия на переднюю педаль; на фиг. 4 - то же, при воздействии усилия на заднюю педаль; на фиг. 5 - мускульный привод, вид сверху; на фиг. 6 - вид А на фиг. 5.
Мускульный привод транспортного средства содержит раму 1, на которой крепится барабан 2 с передним 3 и задним 4 рычагами с педалями. К барабану 2 крепятся два гибких органа 5 и 6. Гибкий орган 5 соединяет барабан 2 с правой ведомой звездочкой 7. Другой гибкий орган, выполненный в виде восьмерки с пересекающимися ветвями, соединяет барабан 2 с левой ведомой звездочкой 8. Каждая ведомая звездочка 7 и 8 снабжена муфтой свободного хода. Обе муфты свободного хода сидят на одном корпусе 9 задней втулки колеса.
Гибкие органы 5 и 6 состоят из правых 10 и левых 11 частей. Правые части 10 изготовлены из цепей, а левый И - из троса. Между барабаном 2 и ведомыми звездочками 7 и 8 к раме 1 крепится ограничительная стойка 12. К верхнему концу стойки 12 крепится верхняя амортизационная пружина 13 с упором, внутри которых по оси проходит ведущая ветвь 14 гибкого органа 5. К нижнему концу ограничительной стойки 12 крепится нижняя амортизационная пружина 15 с упором, внутри которых проходит ведущая ветвь 16 гибкого органа 6. Ограничительную стойку 12 можно передвигать по раме 1, тем самым увеличивая или умень- щая ход гибких органов 5 и 6 при повороте барабана 2 в ту или другую сторону. При установке стойки 12 ближе к барабану 2 увеличивается ход гибких органов 5 и 6, а также угол поворота барабана 2 в ту или другую сторону. Если стойку удалять от барабана 2, уменьщается ход гибких органов 5 и 6 и угол поворота барабана 2. На раме 1 крепится разделительная пластина 17, которая размещается между ведомой и ведущей 16 ветвями гибкого органа 6. Пластина 17 уменьщает трение между ветвями гибкого органа 6.
К раме 1 крепится скоба 18, вдоль .которой имеется ряд сквозных отверстий. К скобе 18 осью 19 крепится маятниковая стойка 20. Отверстия в скобе позволяют
устанавливать стойку на разной высоте в зависимости от роста велосипедиста. Маятниковая стойка 20 верхним концом входит в паз рамы 1. На маятниковой стойке над рамой 1 установлен фиксатор 21, который входит в за- цепление с рамой и удерживает стойку 20 в определенном положении. На верхнем конце маятниковой стойки 20 пальцем крепится седло 22, которое может на пальце поворачиваться под небольщим углом и зани0 мать горизонтальное положение как при переднем положении стойки 20 (фиг. 1), так и при заднем (фиг. 2).
Привод работает следующим образом. Нажимая на передний рычаг 3, велосипедист перемещает педаль вниз. Вместе с
5 рычагом вперед вращается барабан 2, который за ведущую ветвь 14 гибкого органа 5 вращает правую ведомую звездочку 7. Последняя через муфту свободного хода и корпус 9 передает вращение на заднее
Q ведущее колесо. При этом левая часть (из троса) ведущей ветви 14 гибкого органа 5 проходит в верхней амортизационной пружине 13.
Как только передняя педаль рычага 3 дойдет до нижнего положения (фиг. 3 и 1),
5 в амортизационную пружину 13 упрется правая часть ведущей ветви 14 гибкого органа, пружина 13, сжимаясь, смягчит удар и часть энергии вернет при обратном движении гибкого органа 5. Ведомая ветвь гибкого органа при движении передней педали
0 рычага 3 вниз левой частью (трос) сматывается с барабана 2, а правая часть (цепь) наматывается на правую ведомую звездочку 7. Гибкий орган 6 и левая ведомая звездочка 8 вращаются в холостом режиме. Если барабан 2 вращается против часовой
5 стрелки, то ведомая левая звездочка 8 гибким органом 6 вращается по часовой стрелке. Для увеличения крутящего момента, действующего на передннэю педаль рычага 3, велосипедист при помощи рук переносит вес свое0 го тела вперед. Вместе с велосипедистом в переднее положение наклоняется маятниковая стойка 20 с седлом 22 (фиг. 1).
При воздействии на заднюю педаль рычага 4 (фиг. 2 и 4) барабан 2 вращается по часовой стрелке. Гибкий орган 6
5 действует в рабочем режиме, а гибкий орган 5 - в холостом. Ведущая ветвь 16 гибкого органа 6 левой частью (из троса) накручивается на барабан 2, а правая часть (цепь) за левую ведомую звездочку 8, за муфту свободного хода и за корпус 9 (фиг. 4)
0 передает крутящий момент на заднее ведущее колесо. Гибкий орган (трос) 6 проходит через нижнюю амортизационную пружину 15 и упор.
Как только задняя педаль рычага 4 занимает нижнее положение (фиг. 2 и 4), ведущая ветвь гибкого органа 6 своей целью упирается в упор нижней пружины 15 и сжимает ее, тем самым смягчается удар
(фиг. 4), затем пружина часть энергии передает гибкому органу 6 при его обратном движении. Ведомая ветвь гибкого органа 6 разматывается с барабана 2 и наматывается на левую ведомую звездочку 8, при этом она движется с левой стороны разделительной пластины 17, а ведущая ветвь 16 гибкого органа 6 движется с правой стороны пластины 17 (фиг. 4). Чтобы увеличить крутящий момент на задней педали рычага 4, велосипедисту нужно руками, упираясь в руль, перенести вес тела в заднее положение вместе с маятниковой стрелкой 20 и седлом 22 (фиг. 2).
Таким образом, чтобы привести привод в движение, необходимо проворачивать
поочередно педали в разные стороны, при необходимости используя мускульную силу рук. Если же использование силы рук не требуется, то маятниковая стойка 20 устанавливается и крепится фиксатором 21 в положении, удобном для велосипедиста.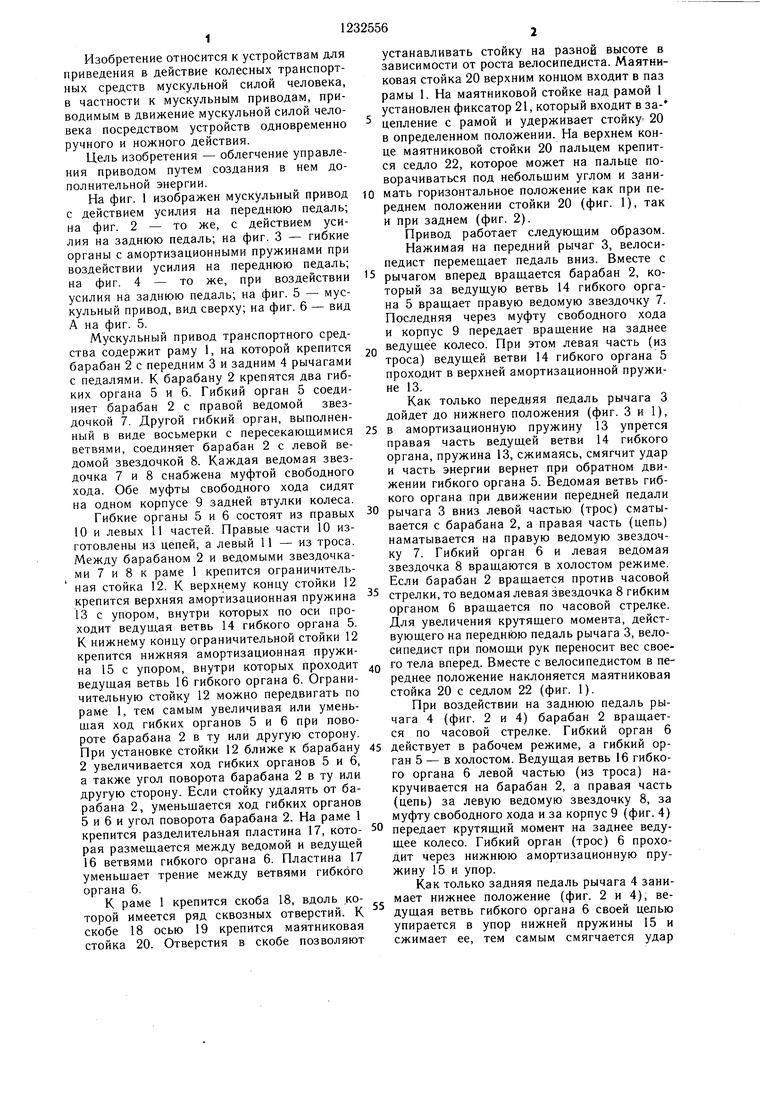

| название | год | авторы | номер документа |
|---|---|---|---|
| ТАНДЕМ А.Г. ДВОРЯНИДОВА | 2003 |
|
RU2247051C1 |
| "Устройство "Дворянидова" для приведения в действие колесных транспортных средств" | 1990 |
|
SU1796530A1 |
| ВЕЛОСИПЕД | 1992 |
|
RU2041114C1 |
| Возвратно-поступательный ножной привод для велосипеда | 2022 |
|
RU2780873C1 |
| Велосипед | 1982 |
|
SU1049328A1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2100240C1 |
| ВЕЛОСИПЕД С ЭРГОНОМИЧНЫМИ ПОСАДКОЙ И ПЕДАЛИРОВАНИЕМ | 2019 |
|
RU2724027C1 |
| ПРИВОД ВЕЛОСИПЕДА (ВАРИАНТЫ) | 2013 |
|
RU2539260C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| Транспортное средство с мускульным приводом | 1986 |
|
SU1311996A1 |

Ф1/г.2
П,& П,б
:.о
W /0.5 Ш,Б
1Г
J5
Ю,6
Фиг.
гз 5
-
1x6.
f
а
ч
г Jа
Фиг. 5
Редактор В. Петраш Заказ 2505/21
Составитель Н. Николаева
Техред И. ВересКорректор И. Муска
Тираж 571Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Фиг.6
| Мускульный привод транспортного средства | 1979 |
|
SU785104A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
