Изобретение относится к горному машиностроению, а именно к средствам предохранения от аварийных ситуаций в вые- мочно-доставочном оборудовании.
Цель изобретения - повышение надежности в работе датчика и уменьшение его длины за счет уменьшения угла срабатывания.
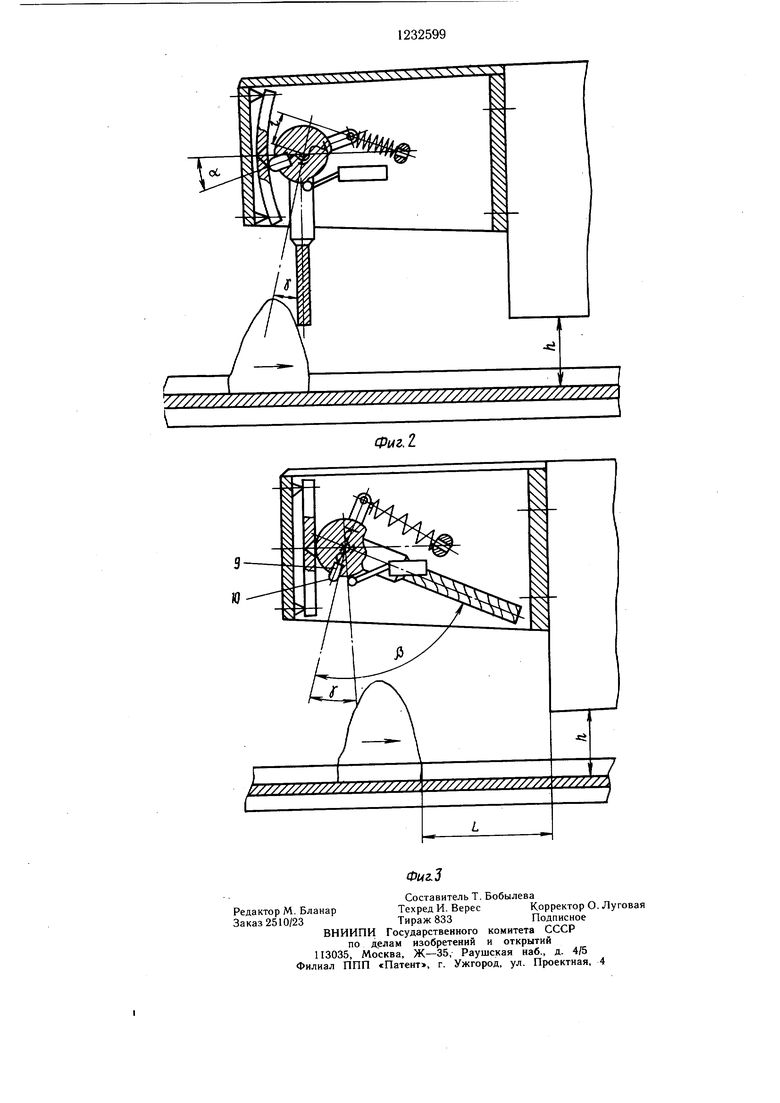
На фиг. 1 изображен датчик негабаритных грузов узкозахватного комбайна, вид сбоку; на фиг. 2 - положение датчика в момент срабатывания контактных элементов; на фиг. 3 - предельное положение рычагов.
Датчик негабаритных грузов узкозахватного комбайна содержит поворотную ось 1, которая установлена на корпусе 2 датчика, закрепленного на корпусе 3 узкозахватного комбайна.
На поворотной оси 1 радиально закреплены упругие рычаги 4, на которые воздействует негабаритный груз 5 при движении его по днишу 6 рештака скребкового конвейера 7. Рычаги по ширине дниша 6 рештака установлены с шагом меньшим минимально возможного негабаритного груза 5 (рычаги совмещены в одной плоскости).
На поворотной оси 1 установлен регулируемый болтом 8 в радиальном направлении кулачок 9 со сферической частью 10, которая взаимодействует с конусным отверстием 11 пластинчатой пружины 12, закрепленной на корпусе 2 датчика и расположена в вертикальной плоскости, параллельной продольной оси поворотной оси 1. При этом кулачок 9 прижимается к пластинчатой пружине 12 болтом 8 для регулирования усилия удержания оси 1 от поворота при силовом взаимодействии рычага 4 с негабаритом 5.
Для того, чтобы упругие рычаги 4 после выхода из конусного отверстия 11 кулачка 9 резко «прятались в корпусе 2 датчика, на поворотной оси 1 закреплен дополнительный рычаг 13 с винтовой пружиной 14 сжатия, один конец которой закреплен на корпусе датчика 2, при этом продольная ось пружины 14 сжатия с дополнительным рычагом 13 в исходном положении совпадает с осью конусного отверстия 11. В корпусе 2 датчика размешены контактные элементы 15, обеспечивающие под воздействием кулачка 16 поворотной оси 1 отключение конвейера 7 и комбайна.
Датчик негабаритных грузов работает следующим образом.
В процессе транспортирования грузов по днишу б рештака скребкового конвейера 7 упругие рычаги 4 входят в соприкосновение, с ними при превышении грузом допустимой высоты h прохождения под комбайном. Те
0
5
0
5
0
5
0
5
0
5
грузы, которые по высоте больше, чем высота h, задерживаются, опрокидываются или частично разрушаются упругими рычагами 4.
Кулачок 9, размещаясь в конусном от- версии 1 пластинчатой пружины 12, удерживает ось 1 в фиксированном положении от проворота (фиг. 1). Это позволяет при обнаружении рычагами 4 негабарита 5 как бы предпринять попытку привести его в состояние, удобное для прохождения под комбайном, что способствует исключению ложных срабатываний.
При этом направление усилия пружины 14 сжатия дополнительного рычага 13 совпадают с продольной осью кул ачка 9 и конусного отверстия 11, что приводит к отсутствию крутящего момента от действия винтовой пружины 14 сжатия.
В положении датчика при максимальном силовом противодействии продвижению негабарита 5 усилие винтовой пружины 14 сжатия дополнительного рычага 13 создает возрастающий крутящий момент, стремящийся повернуть поворотную ось 1 на угол р (фиг. 2).
При дальнейщем действии негабарита 5 на рычаги 4 кулачок 9 со сферической частью 10 поворачивается на угол а, после чего полностью освобождается от силового взаимодействия пластинчатой пружины 12. При этом рычаги 4 поворачиваются на угол -у - угол срабатывания, равный углу а (без учета упругой деформации рычага 4), а пружина 14 сжатия создает возрастающий крутящий момент, так как возрастает плечо Е, стремящийся резко повернуть рычаги 4 в крайнее положение на угол р-у (фиг. 3). После чего связь рычагов 4 с негабаритом 5 разрывается, а после срабатывания контактных элементов 15, негабариту 5 представляется возможность беспрепятственного прохода расстояния L (фиг. 3), равного пути остановки конвейера 7 после его отключения.
Радиальным смещением кулачка 9 производится регулирование усилия срабатывания датчика, т. е. происходит точная отстройка датчика от ложных срабатываний.
За счет малой деформации пластинчатой пружины при выходе кулачка 9 со сферической частью 10 из конусного отверстия 11 повышается надежность работы датчика негабарита грузов.
Малый угол поворота оси 1 при достижении максимального усилия на рычагах 4 позволяет сократить расстояние между поворотной осью 1 и корпусом 3 комбайна.
После освобождения от силового взаимодействия кулачка 9 со сферической частью с пластинчатой пружиной 12 винтовая пружина 14 резко поворачивает поворотную ось 1, что способствует быстродействию срабатывания контактных элементов 15.
У/////7//////7////7/7///////7/////////////////////////
.1
Фиг.3
Составитель т. Бобылева
Редактор М. БланарТехред И. ВересКорректор О. Луговая
Заказ 2510/23Тираж 833Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патеит, г. Ужгород, ул. Проектная, 4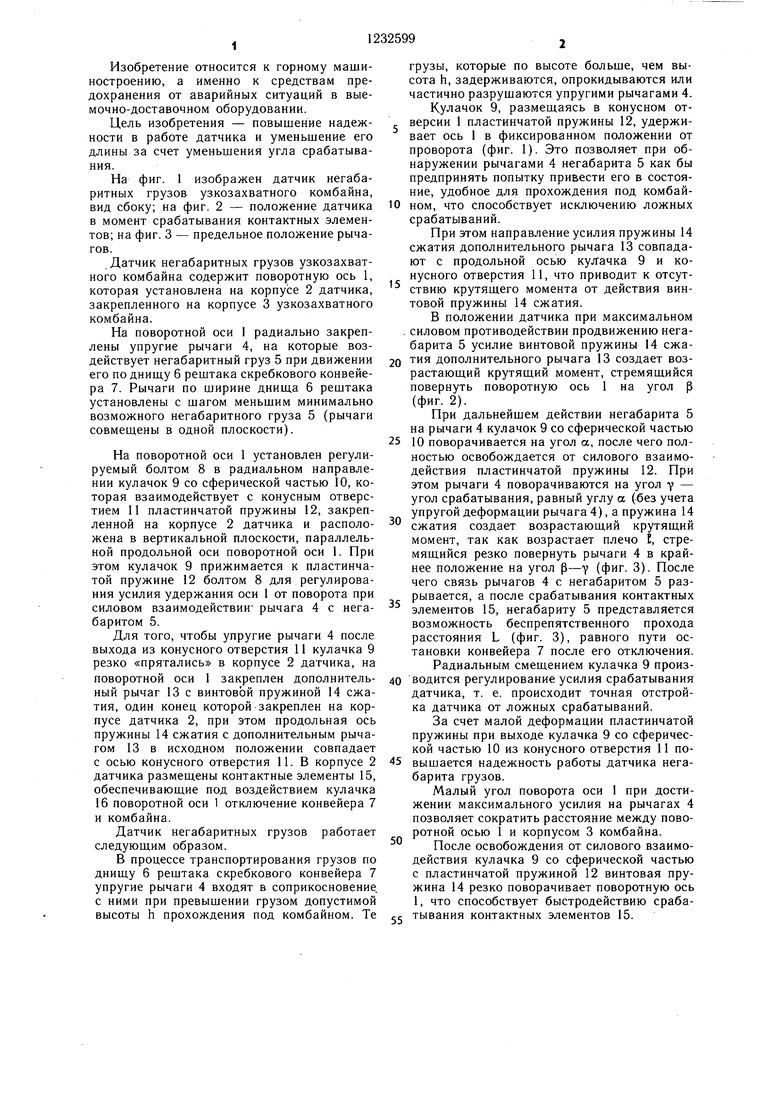
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик негабарита грузов узкозах-ВАТНОгО КОМбАйНА | 1978 |
|
SU797988A1 |
| Горный комбайн | 1932 |
|
SU30245A1 |
| Забойный скребковый конвейер | 1988 |
|
SU1632885A1 |
| Устройство для удаления негабаритов с ленты конвейера | 1984 |
|
SU1194792A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| ОПОРА УЗКОЗАХВАТНОГО КОМБАЙНА | 1972 |
|
SU352012A1 |
| УДАРНО-ПОВОРОТНЫЙ МЕХАНИЗМ | 2001 |
|
RU2200817C2 |
| Механизм подачи очистного комбайна | 1984 |
|
SU1155748A1 |
| Устройство для загрузки конвейера | 1979 |
|
SU797996A1 |
| Узкозахватный угольный комбайн | 1981 |
|
SU972081A1 |

| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Датчик негабарита грузов узкозах-ВАТНОгО КОМбАйНА | 1978 |
|
SU797988A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
