t
Изобретение относится к горному машиностроению, а именно к средствам предохранения от аварийньк ситуаций в выемочно-доставочном оборудовании .
Известен предохранительный датчик цепного конвейера, включающий два расположенных на поворотных втулках рычага и нормально замкнутый вык гючатель, при этом одна из втулок снабжена в торцовой части подпружиненными контактами, а вторая - пластинкой, нормально замыкающей эти контакты 1.
Однако в этом датчике рычаги контактируют с тяговым органом и должны быть вынесены из зоны передвижения грузов, что не обеспечивает предохранение от заклинивания негабаритных предметов.
Известен датчик негабарита грузов узкозахватного комбайна, включающий выключатель, укрепленную к кронштейнам корпуса комбайна поворотную ось, на которой закреплены рычаги для взаимодействия с грузом р .
При прохождении негабарита рыча-. ги отклоняются вверх. В положении максимально допустимого отклонения срабатывает конечный выключатель.
что обеспечивает отключение приводов комбайна и скребкового конвейера. Поверхность рычагов выполнена криволинейной с тем, чтобы обеспечить большую чувствительность датчика при больших размерах негабаритных предметов. При этом негабаритные предметы меньших размеров должны разрушаться рычагами, не вызывая
0 .срабатывания датчика. Однако, ввиду наличия свободного выбега конвейера после отключения привода, его тяго вый орган , движущийся по инерции,увлекает за собой негабаритный пред5мет, который заклинивается между комбайном и конвейером. Таким образом, усилие, необходимое для срабатывания датчика, не падает до нуля при достижении максимальной величины
0 отклонения чувствительного элемента датчика и срабатывании конечного выключателя, а наоборот резко возрастает, в связи с чем неразрушаемый негабарит заклинивается между ком5байном и конвейером. Причем, эффект снижения усилий в тяговых цепях за. счет отключения приводов конвейера и комбайна получается недостаточным для тога, чтобы предотвратить разви0тие аварии.
Недостатками конструкции можно считать также отсутствие возможности регулирования усилия, при котором должно происходить срабатывание датчика, а также то, что принятая зона нечувствительности датчика для его отстройки от ложных срабатываний определяется формой и размерами нех абаритного груза, а не его прочностью
Цель изобретения - исключение ложных срабатываний и заклинивания негабаритов под комбайном.
Указанная цель достигается тем, что датчик снабжен консольно закрепленными на корпусе комбайна двумя листовыми пружинами, расположенными одна над другой перпендикулярно поворотной оси, и кулачком, жестко закрепленным на поворотной оси и расположенным между листовыми пружинами для взаимодействия с ними,при этом сечение кулачка, перпендикулярное поворотной оси, имеет форму параллелограмма.
Листовые пружины выполнены с пазами в средней части и стянутое между собой, посредством установленного в пазах болта, а рычаги датчика выполнены в виде упругих цилиндрических стержней.
Па фит. 1 изображен датчик негабарита грузов узкозахватного комбайна; на фиг. 2 - положение датчика при предельном раскрытии листовых пружин; на фиг. 3 - предельное положение рычагов; на фиг. 4 - график, отражающий характер силового взаимодействия негабарита с чувствительными элементами.
Датчик содержит поворотную ось 1, которая установлена в двух кронштейнах 2, выполненных из толстолистовой стали. Кронштейны 2 в одном из сечений соединены посредством плиты 3 и закреплены на корпусе узкозахватного комбайна. На поворотной оси укреплены радиально рычаги 5, на которые воздействует негабаритный груз при движении по днищу 6 рештака скребкового конвейера. Рычаги 5 .по ширине днища б рештака установлены с шагом, меньшил; минимально возможного негабаритного груза (на чертежах показан один рычаг, а остальные совмещены с ним в одной плоскости).
Рычаги 5 выполнены в виде цилиндрических упругих стержней, например, из отрезков стального каната. На поворотной оси 1 жестко установлен кулачок 1, имеющий в сечении форму параллелограмма. Кулачок сжимается двумя протяженными листовыми пружинами 8, закрепленными- на плите 3.Сжатие осуществляется стяжным болтом 9, установленным в пазах листовых пружин 8 с возможностью перемещения вдоль них для регулирования усилия удержания оси 1 от проворота.
Соотношение сторон параллелограмма в сечении -кулачка 7 выбирается таким, чтобы усилие проворота оси в определенном диапазоне углов в.озрастало до установленной величины, а затем резко падало до нуля. На кронштейне 2 размещены контактные элементы 10, обеспечивающие под воздействием кулачка 7 поворотной оси отключение конвейера и комбайна.
Работа датчика негабарита осуществляется следующим обра.зом.
В процессе транспортирования грузов по днищу 6 рештака рычаги 5 поворотной оси 1 входят в соприкосновение с ними при превышении допустимой высоты h прохождения под комбайном. Те грузы, которые по высоте больше, чем h, задерживаются, опрокидываются или частично разрушаются рычагами 5.
Упругая конструкция рычагов 5 придает им большую свободу возможных перемещений под воздействием негабарита. Это позволяет при обнаружении негабарита как бы предпринять попытку привести .его в состояние, удобное для прохождения под комбайном, что способствует исключению ложных срабатываний.
Силовая реакция взаимодействия рычагов 5 датчика с негабаритным грузом 11 погашается листовыми пружинами 8 посредством их упругой деформации .
На фиг. 2 показано положение датчика при предельном раскрытии листовых пружин 8, соответствующем углу ot поворота оси 1. Это положение характеризуется максимальным силовым противодействием продвижению негабарита 11 и срабатыванием контактных элементов 10, дающих сигнал на останов скребкового конвейера и комбайна.
При дальнейшем действии негабарита 11 на рычаги 5 листовые пружины В захлопываются и ускоренно поворачивают ось 1 на угол /5 . Связь рычагов 5 с негабаритом 11 на этом этапе разрывается и негабариту предоставляется возможность беспрепятственного прохода расстояния & , равного пути остановки тягового органа конвейера после его отключения.
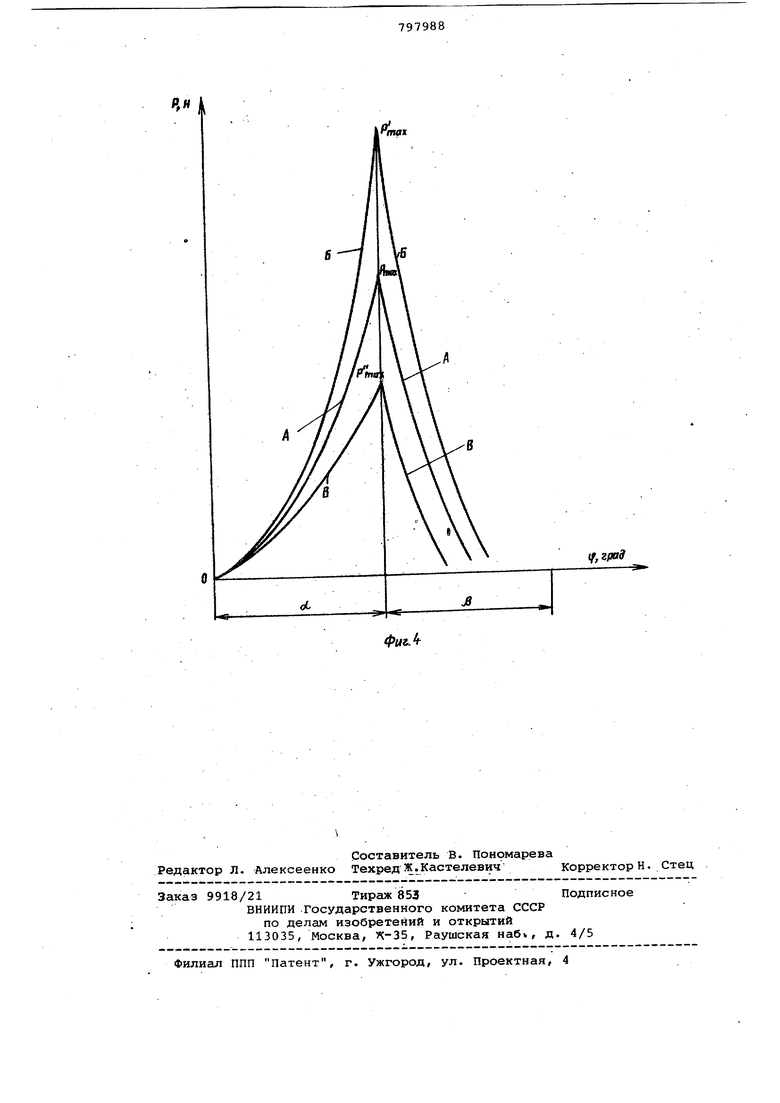
Характер силового взаимодействия негабарита с чувствительными элементами - рычагами датчика может быть пояснен с помощью фиг. 4, на которой представлена кривая А, отображакнцая изменения усилия противодействия продвижению негабарита со
стороны рычагов 5 в функции угла ф поворота оси 1. На первом зтапе при 11) О-г об за счет поворота кулачка 7, контактирующего гранями с листовыми пружинами 8, происходит деформация
пружин и возрастание усилия Р, которое достигает максимального значения
при ( (X , соответствующего
Р,
тпох
срабатыванию контактньох элементов 10. При дальнейшем увеличении угла поворота (( в диапазоне (Х -т (. «Х -() вследствие перехода пружин 8 на другие грани поверхности кулачка происходит резкое снижение величины Р до нуля.
Смещением стяжного болта 9 влево от положения, что уменьшает длину консоли пружин 8 и увеличивает их жесткость, может быть достигнуто увеличение значений Р, изменяющихся, например, по кривой Б, а соотвественно и усилия срабатывания датчика Pfnoix . Смещение болта 9 вправо обеспечивает уменьшение значений Р, изменяющихся, например, по кривой В, а соответственно и усилия срабатывания датчика негабарита Ртах Указанным способом может осуществляться регулировка датчика негабарита и, поскольку регулирование здесь производится по величине усилия срабатывания, точная отстройка датчика от ложных срабатываний.
Таким образом, датчик негабарита в первой фазе работы при появлении негабарита изменяет его положение с целью обеспечения нормального прохождения под комбайном. В последующем, если это Ие удаётся, он, обеспечивая подачу сигнала на остановку конвейера, выходит из силовоговзаимодействия с негабаритом,предотвращая его заклинивание под комбайном. Предлагаемая конструкция датчика дает возможность регулировать
зону его нечувствительности и исклю-. чить ложные срабатывания.
Формула изобретения
1.Датчик негабарита грузов узкозахватного комбайна, включающий вы- . ключатель, укрепленную к кронштейнам корпуса комбайна поворотную ось, на которой закреплены рычаги для взаимодействия с грузом, о т л и ч а ющ и и с я тем, что, -с целью исключения ложных срабатываний и захваты
o вания негабаритов под комбайном,он снабжен консольно закрепленными на корпусе комбайна двумя листовыми пружинами, расположенными одна над другой перпендикулярно поворотной
5 оси, и кулачком, жестко закрепленным на поворотной оси и расположенным между листовыми пружинами для взаимодействия с ними, при этом сечение кулачка, перпендикулярное
6 поворотной оси,имеет форму параллелограмма .
2.Датчик по п. 1, отличающийся тем, что листовые пружины выполнены с пазами в средней части и стянуты между собой посредством
5 установленного в пазах болта.
3.Датчик по пп. 1 и 2, о т л ичающийся Тем, что рычаги датчика выполнены в виде упругих цилиндрических стержней.
0
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 109521, кл. В 65 G 43/06, 1957 .
2.Чертеж. Рычаг откиднойБК52М.
5 03.00.002, изготавливаемый Горловским машзанодом, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик негабаритных грузов узкозахватного комбайна | 1984 |
|
SU1232599A1 |
| Система управления очистным комбайном и скребковым конвейером | 1987 |
|
SU1481397A1 |
| Став скребкового конвейера | 1980 |
|
SU874516A1 |
| ДРОБИЛКА КОНВЕЙЕРНАЯ | 1972 |
|
SU354890A1 |
| Дробилка забойная конвейерная | 1983 |
|
SU1138188A1 |
| ОПОРА УЗКОЗАХВАТНОГО КОМБАЙНА | 1972 |
|
SU352012A1 |
| Устройство для контроля состояния цепи скребкового конвейера | 1990 |
|
SU1756592A1 |
| Забойный скребковый конвейер | 1988 |
|
SU1632885A1 |
| УСТРОЙСТВО для УДЕРЖАНИЯ УГОЛЬНОГО КОМБАЙНА | 1971 |
|
SU298745A1 |
| Манипулятор для загрузки конвейера мешковыми грузами | 1985 |
|
SU1316949A1 |
М Л
