1
Изобретение относится к машиностроению, в частности к механизмам, предназначенным для преобразования однонаправленного вращения ведущего звена с постоянной скоростью в возвратно-вращательные колебания (качания) двух ведомых звеньев в противо- фазе.
Цель изобретения - расширение эксплуатационных возможностей, так как ведомым звеньям сообщается возвратно-вращательное движение за счет кривошипа с изменяемым эксцентриситетом, и, кроме того, обеспечивается плавное трогание с места, что позволяет использовать его в механизмах с большой инерционной массой.
На фиг.1 схематически изображен предлагаемый механизм преобразования вращательного движения, разрез; на фиг.2 - то же, вид сверху.
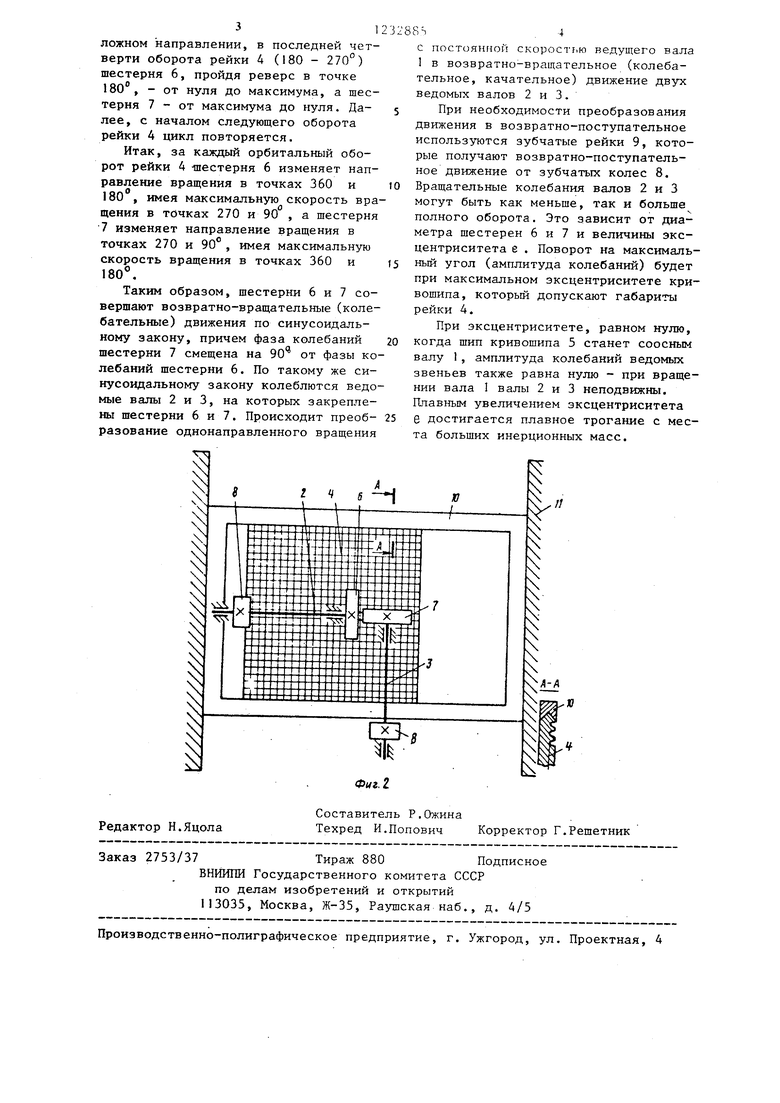
Механизм преобразования вращательного движения содержит ведущий вал 1, кинематически связанный распределительной передачей с двумя ведомыми звеньями - валами 2 и 3. Распределительная передача выполнена в виде зубчатой рейки 4, смонтированной на кривошипе 5 вала 1. Зубчатая рейка 4 имеет квадратную в плане форму с двумя взаимно перпендикулярными нарезками рабочих зубьев (на фиг.2 зубья условно изображены взаимно перпендикулярными линиями). Каждый зуб рейки 4 имеет, таким образом, два взаимно перпендикулярных рабочих профиля. При изготовлении вначале нарезается один ряд зубьев как на обычной рейке а затем перпендикулярно ему нарезается второй ряд таких же зубьев. С каждым рядом зубьев рейки 4 находится в постоянном зубчатом зацеплении одна из шестерен 6 или 7, жестко закрепленных на ведомых валах 2 и 3 соответственно. Валы 2 и 3 расположены взаимно перпендикулярно в плоскости, параллельной рейке 4.
Валы 2 и 3 могут быть выходными звеньями данного механизма (связаны с рабочими органами) или же посредством зубчатых колес 8 передавать движение далее по двум кинематическим цепям, например, через зубчатую рейку 9 (фиг.1). От вращения вокруг собственной оси рейка 4 стабилизирована тем, что помещена в каретке 10, которая в свою очередь установлена в корпусе 1I.
32885
Кривошип 5 выполнен с изменяемым эксцентриситетом е любым известным способом.
Механизм работает следующим обра;; зом.
Ведущее звено - вал 1 - равномерно вращается в одном направлении. Связанная с его кривошипом 5 зубчатая рейка 4 получает орбитальное дви0 жение по окружности с радиусом, равным эксцентриситету е кривошипа 5 (любая произвольно взятая точка рейки движется по такой же окружности). При этом рейка 4 свободно, перемещает5 ся по направляющим каретки 10, а сама каретка 10 перемещается по направляющим корпуса 11. От вращения вокруг собственной оси рейка 4 застопорена направляющими каретки 10. Шес0 терни 6 и 7, находясь в постоянном зацеплении с рейкой 4, приводятся в возвратно-вращательное (качательное) движение, одновременно скользя вдоль зубьев рейки.
5 На фиг.2 изображено положение, когда плечо кривошипа 5 направлено по направлению 270 от оси его вращения, т.е. строго влево от вала. (Эксцентриситет е кривошипа в данном при0 мере установлен в промежуточное между максимальным и минимальным положением) . Из этого положения при вращении вала 1 по часовой стрелке рейка 4 перемещается по дуге окружности в
, положение 360 по направлению от оси враш,ения вала I . На протяжении этой четверти оборота (от 270 до 360 ) скорость вращения шестерни 6 изменяется от максимальной до нуля - в кон0 це участка зубья рейки .скользят
вдоль зубьев шестерни 6, не сообщая враш,ения последней. Скорость вращения шестерни 7 увеличивается от нуля до максимальной величины.
5 При прохождении рейки 4 следующей четверти оборота (от О до 90 ) скорость шестерни 6 возрастает от нуля до максимальной, но вращение идет в противоположную, чем в 0 предыд оцей четверти, сторону (реверс произошел при 360 ),а скорость вращения шестерни 7 падает от максимальной до нуля.
На следующей четверти оборота рейки 4 (90 - 180 ) шестерки 6 изменяет скорость от максимальной до нуля, а шестерня 7, проходя реверс, - от нуля до максимальной в противопо312
ложном направлении, в последней четверти оборота рейки 4 (180 - 270 ) шестерня 6, пройдя реверс в точке 180°, - от нуля до максимума, а шестерня 7 - от максимума до нуля. Далее, с началом следующего оборота рейки 4 цикл повторяется.
Итак, за каждый орбитальный оборот рейки 4 -шестерня 6 изменяет направление вращения в точках 360 и 180, имея максимальную скорость вращения в точках 270 и 90 , а шестерня 7 изменяет направление вращения в точках 270 и 90, имея максимальную скорость вращения в точках 360 и
l8o
Таким образом, шестерни 6 и 7 совершают возвратно-вращательные (колебательные) движения по синусоидальному закону, причем фаза колебаний шестерни 7 смещена на 90 от фазы колебаний шестерни 6. По такому же синусоидальному закону колеблются ведомые валы 2 и 3, на которых закреплены шестерни 6 и 7. Происходит преобразование однонаправленного вращения
Редактор Н.Яцола
Фиг.2
Составитель Р.Ожина
Техред И.Попович Корректор Г.Решетник
Заказ 2753/37Тираж 880Подписное
ВНЙИШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
0
288S. 4
с постоянной скоростью ведущего вала I в возвратно-вращательное (колебательное, качательное) движение двух ведомых валов 2 и 3.
5 При необходимости преобразования движения в возвратно-поступательное используются зубчатые рейки 9, которые получают возвратно-поступательное движение от зубчатых колес 8. Вращательные колебания валов 2 и 3 могут быть как меньше, так и больше полного оборота. Это зависит от диаметра шестерен 6 и 7 и величины эксцентриситета е . Поворот на максимальный угол (амплитуда колебаний) будет при максимальном эксцентриситете кривошипа, который допускают габариты рейки 4.
При эксцентриситете, равном нулю, когда шип кривошипа 5 станет соосным валу 1, амплитуда колебаний ведомых звеньев также равна нулю - при вращении вала 1 валы 2 и 3 неподвижны. Плавным увеличением эксцентриситета е достигается плавное трогание с места больших инерционных масс.
5
0
5

| Реверсивная передача | 1983 |
|
SU1094997A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| МЕХАНИЗМ ДЛЯ ОСУЩЕСТВЛЕНИЯ ПЕРЕМЕЩЕНИЯ В ПЛОСКОСТИ В ЛЮБОМ НАПРАВЛЕНИИ | 0 |
|
SU194508A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
