Изобретение относится к грузоподъемным машинам для вертикального одновременного подъема-спуска груза на определенную высоту посредством преобразования вращательного движения в вертикально-поступательное перемещение исполнительного звена с использованием цепной передачи.
Например, широко известны и широко применяются передачи вращательного движения гибкими связями - бесконечными ремнями или бесконечными роликовыми цепями при постоянном изменении межцентрового расстояния только на величину износа или вытяжки бесконечных ремней или роликовых цепей.
К таким устройствам относятся самонатяжные передачи с постоянным натяжением. Сюда относятся передачи с плавающим валом и с натяжным роликом. Натяжение ремня или роликовой цепи создается грузом, оттягивающим ведомую или ведущую систему по прямолинейным направляющим. Например, груз (на фиг.10, стр. 454, Справочник машиностроителя, т.4, 1956 г. Москва) посредством роликовой цепи, перекинутой через звездочку под прямым углом, оттягивает ведомую звездочку 1, соединенную с ведущей звездочкой 2, посредством ведомой ветви 3 и ведущей ветви 4. При этом ведомая звездочка 1 размещена на тележке с катками и перемещается с ней в горизонтальной плоскости, а подвешенный груз перемещается вертикально в вертикальной плоскости.
Известны также и другие изобретения, посредством которых усовершенствуются самонатяжные системы. Например, "Натяжное устройство для цепных передач" (по ав. св. СССР 937837, F 16 H 7/10, 1980 г. Бюл. 23 от 23.06.1983 г. ).
Целью изобретения является - снижение веса натяжного груза за счет применения дополнительной пары, обеспечение любого наперед заданного закона изменения автоматического натяжения ветвей при любом направлении вращения вала электродвигателя. Натяжное устройство, содержащее неподвижное основание 1, имеющее направляющие, установленную на них подвижную раму 2 с установленным электродвигателем 3, на валу которого установлена звездочка 4, и механизм перемещения подвижной рамы, выполненный в виде винтовой пары, винт которой связан одним концом с рамой, а другим концом винт 5 связан с неподвижным основанием 1, а гайка представляет собой барабан 6, наружная поверхность которого охвачена гибкой нитью 7 с подведенным натяжным грузом 8.
Как видно из обоих примеров, названные устройства имеют общий недостаток в том, что передача вращательного движения может производиться только при наличии посредника в виде горизонтально двигающейся тележки на катках в первом устройстве и подвижной рамы с двигателем и винтовой пары во втором устройстве.
Оба приведенные устройства и подобные им относятся к самонатяжным передачам с постоянным натяжением и с почти постоянным межцентровым расстоянием между центрами вращения ведущей и ведомой систем, поэтому общим недостатком самонатяжных передач является необходимость устанавливать его по максимальной передаваемой нагрузке, действующей сравнительно редко. В результате сам ремень или цепь, а также валы и опоры перегружены, что снижает их долговечность и увеличивает потери энергии. К недостаткам названных устройств относится также и неравномерность нагрузки на ведущую и ведомую ветви. Названные устройства и подобные им предназначены только для передачи вращательного движения от одной ведущей системы другой ведомой системе, а натяжные устройства предназначены для большей эффективности передачи вращательного движения и для сохранения постоянного расстояния между центрами вращения ведущей и ведомой систем, на что тратится большая часть энергии и что усложняет конструкцию устройства, его работу, эксплуатацию и долговечность.
Известны устройства для преобразования вращательного движения ведущего вала в возвратно-поступательное перемещение исполнительного звена при жесткой связи между валом и исполнительным звеном, но с постоянно изменяющимся расстоянием между центром вращения вала и центром перемещения исполнительного звена дважды при каждом обороте вала.
Таким устройством, например, является "Механизм взаимопреобразования вращательного и возвратно-поступательного перемещения" по патенту Великобритании GВ 1517970, F 16 С 3/28, 19.07.1978 г. (далее - механизм-прототип).
Механизм-прототип имеет вал 1 с консолью вала 2, разделенные кольцом 3, который вставлен в подшипники с корпусами, закрепленные на основании, которые не показаны, но они подразумеваются. На консоль вала 2 насажаны по скользящей посадке с зазором два эксцентрика 5 и 6 с переменным эксцентриситетом, который может быть предварительно установлен на одинаковую величину в противоположном направлении относительно оси вращения вала с помощью регулируемой отвертки вручную оси 7, имеющей резьбовые концы с противоположным направлением резьбы (правой и левой) с каждой стороны от центрального кольца 26. Резьбовые концы оси 7 ввинчены в радиальные резьбовые отверстия 8 в выступах 24 эксцентриков 5 и 6, которые имеют удлиненные в радиальном направлении полупрямоугольные отверстия "в", имеющие длину "l" и ширину "w", которая больше диаметра консоли вала 2 на величину зазора скользящей посадки, а длина полупрямоугольного отверстия "в" больше диаметра консоли вала 2 в несколько раз. Каждый эксцентрик 5 и 6 имеет два разных наружных диаметра с соответствующими поверхностями. На цилиндрическую поверхность 18 меньшего диаметра одного эксцентрика 5 насажен подшипник 9, а на цилиндрическую поверхность 19 меньшего диаметра другого эксцентрика 6 насажен подшипник 10. На торцевой стороне с большим диаметром каждого эксцентрика имеется выступ 24 с радиальным резьбовым отверстием 8 и скользящим каналом 25, обеспечивается соединением типа "ласточкин хвост", совместное соединение и совместное вращение одновременно двух эксцентриков 5 и 6 вокруг оси вращения консоли вала 2, которая пустотелая, имеет внутреннюю полость крестообразного сечения с вертикальным каналом и прорезью 15. Полый конец консоли вала 2 имеет резьбовую нарезку 17, на которую навинчивается гайка 16 после сборки. Эксцентрики 5 и 6 соединены между собой осью 7, которая вставляется при сборке средним кольцом 26 в крестообразную полость пустотелой консоли вала 2 и фиксируется в нужном положении посредством паза 26 деталью 14 тоже крестообразного сечения.
На фиг.4 механизм-прототип показан в исходном статическом положении, когда центры эксцентриков 5 и 6 сведены к центру оси вращения вела, т.е. имеют нулевой эксцентриситет. В таком положении эксцентрики 5 и 6 не являются эксцентриками, а являются простыми дисками с удлиненными в радиальном направлении полупрямоугольными отверстиями "в", имеющими длину "l" и ширину "w". На наружным диаметр подшипника 9 насажена круглой частью тяга 11, а на наружный диаметр подшипника 10 насажена круглой частью тяга 12. На зауженных концах тяг 11 и 12 шарнирно подсоединены поршни 20, которые вставляются в цилиндрические полости 21 и 22 в общем корпусе 23. Все детали в собранном виде вместе с дисками 4 и 13 насажены на пустотелую консоль вала 2 по скользящей посадке, предварительно отрегулированные вручную осью 7 на нужный эксцентриситет, стянуты вдоль консоли вала 2 в единую конструкций посредством гайки 16 и резьбы 17. Диски 4 и 13 имеют уплотнение в кольцевой проточке 29, соприкасаемой с торцевой поверхностью меньшего диаметра цилиндрических поверхностей l8 и 19, и внешнее уплотнение в кольцевой проточке 30, соприкасаемой с торцевой поверхностью на тягах 11 и 12.
Механизм-прототип работает следующим образом.
При вращении вала 1 от привода (не показан) с эксцентриками 5 и 6, установленными в положении "нулевого эксцентриситета", поршни 20 находятся на одном уровне, механизм работает в режиме холостого хода и не оправдывает своего назначения. При необходимости рабочего хода поршней 20 механизм останавливают, вынимают поршни 20 из цилиндрических полостей 21 и 22 корпуса 23, ослабляют гайку 16 и, вращая вручную отверткой риску 27 оси 7 на определенное число оборотов, устанавливают нужный размер эксцентриситета эксцентриков 5 и 6 закрепляют весь механизм гайкой 16. Только после этого снова поршни 20 вводят в цилиндрические полости 21 и 22 корпуса 23. И только после этого механизм приобретает рабочее положение.
При вращении вала 1 от привода консоль вала 2, воздействуя кромками прорези 15 перпендикулярно на резьбу оси 7 и вращая тем самым ось 7 перпендикулярно оси вращения консоли вала 2, вращает резьбовыми концами одновременно вместе два эксцентрика 5 и 6 вокруг оси вращения вала 1 с соответствующим установленным эксцентриситетом. Круглая часть каждой тяги 11 и 12, вращаясь на подшипниках 9 и 10 вокруг эксцентриков 5 и 6, преобразует величину эксцентриситета в размер хода поршней 20, т.е. происходит взаимопреобразование вращательного движения вала в возвратно-поступательное перемещение поршней 20.
Единственным достоинством механизма-прототипа является возможность использования переменного эксцентриситета в пределах от нуля до определенного размера, ограниченного длиной "l" полупрямоугольного отверстия "в" каждого эксцентрика 5 и 6. В то же время механизм-прототип обладает множеством недостатков, которые не позволили его широко применять в машиностроении.
Механизм-прототип имеет следующие непреодолимые недостатки.
1. Максимальный размер эксцентриситета Lmax равен:
Lmax = (l - dк.в.),
где l - размер длины полупрямоугольного отверстия;
dк.в. - диаметр консоли вала 2.
Следовательно, максимальный ход поршней равен S = 2Lmax. Размер эксцентриситета ограничен длиной "l" и может быть увеличен только посредством увеличения полупрямоугольного отверстия "в" в радиальном направлении, так что при необходимости увеличения эксцентриситета даже на незначительную величину потребуется увеличение двойной величины меньшего диаметра эксцентриков, на которые насажены подшипники 9 и 10 и автоматически будут увеличиваться и большие диаметры эксцентриков 5 и 6. Потребуется увеличение соответствующей радиальной длины резьбовых концов оси 7, резьбовых радиальных отверстий 8, увеличится длина и объем выступов 24 и скользящих каналов 25. Поэтому произойдет несоизмеримое увеличение общей массы эксцентриков 5 и 6, подшипников 9 и 10, тяг 11 и 12, суммарный вес которых будет сосредоточен на слабой резьбовой оси 7, соединяющей два эксцентрика 5 и 6, а диаметр резьбовой оси 7 при этом ограничивается диаметром пустотелой консоли вала 2. Центры тяжести эксцентриков 5 и 6 вынужденно удалены от оси вращения пустотелой консоли вала 2. При этом радиус центра тяжести эксцентриков 5 и 6 относительно оси вращения консоли вала 2 больше эксцентриситета за счет наличия пустоты радиального полупрямоугольного отверстия "в", а суммарный вес эксцентриков 5 и 6, подшипников 9 и 10, тяг 11 и 12 и поршней 20 с их противодействующими сопротивлениями сосредоточен на концах радиусов эксцентриситетов, которых физически нет, но функции которых выполняют резьбовые концы оси 7. Следовательно резьбовые концы оси 7 являются физическими радиусами кривошипа аналогично радиусам кривошипов в кривошипно-шатунных или в кривошипно-кулисных механизмах, а эксцентрики 5 и 6 выполняют функции концевых шарниров или "камней" радиусов кривошипов в кривошипных механизмах, у которых центры вращения кривошипов и валы вынесены за пределы шатунов и кулис, а резьбовые концы (радиусы кривошипов) оси 7 и вал помещены внутри пустотелых полупрямоугольных отверстий "в". Только в этом и разница, а физические действия их всех аналогичны рычагам кривошипных механизмов.
2. Эксцентрики 5 и 6 жестко связаны с пустотелой консолью вала 2 только посредством резьбовой оси 7. Поэтому и крутящий момент, переданный со стороны привода или со стороны всех упомянутых суммарных масс всех деталей и узлов и сопротивлений со стороны поршней 20, воспринимается только двумя концами резьбовой оси 7. При этом точки приложения сил крутящих моментов, действующих на резьбу оси 7, перпендикулярно оси 7, являются радиусы кромок прорезей 15 пустотелой консоли вала 2. Силы от суммарных масс эксцентриков 5 и 6, подшипников 9 и 10, тяг 11 и 12 и их поршней 20 с сопротивлениями, умноженные на радиусы эксцентриситетов обоих эксцентриков 5 и 6, несоизмеримы с моментом сил, умноженным на радиусы кромок прорези 15 пустотелой консоли вала 2. Таким несоизмеримым силам по величине сопротивляется только площадь поперечного сечения внутреннего диаметра резьбы d1 оси 7, которая должна преодолеть суммарные напряжения: от среза, от изгиба и от напряжения на разрыв, при вращении вала, от центробежных сил всех суммарных масс и сопротивлений, приложенных к концам тонкой резьбовой оси 7 на расстоянии их крепления к выступам 24 эксцентриков 5 и 6.
Поэтому механизм-прототип является маломощным, а число оборотов вала в единицу времени только наименьшее, так как центробежные силы от суммарных масс находятся в прямой квадратичной зависимости от числа оборотов их вокруг оси вращения вала, от радиуса крепления концов резьбовой оси 7 к выступам 24 и от суммарного веса всех вращающихся узлов и деталей относительно оси вращения вала 1 и консоли вала 2.
3. Механизм-прототип консольный, т.е. он может быть смонтирован только на одной консоли с одной стороны вала 1, так как с другой стороны вала 1 насажены коренные подшипники и средства силового привода, посадочные диаметры деталей которых меньше диаметра кольца 3. Консольное размещение всего механизма на односторонней пустотелой консоли вала 2 определено сборкой механизма только со стороны конца консоли вала 2. Поэтому механизм-прототип не может быть размещен по всей длине вала 1.
При консольной конструкции механизма-прототипа суммарный вес массивных узлов и деталей как со стороны привода, так и со стороны поршней с их сопротивлениями создает опрокидывающий момент, который равен величине суммарных сил и сопротивлений, умноженных на плечо, равное от середины длины консоли вала 2 до первого коренного подшипника, установленного за кольцом 3 со стороны привода.
Такое консольное размещение всего механизма и неизбежные моменты сил, возникающие при консольном их действии, неизбежно вызывают вибрацию всего механизма, что крайне недопустимо.
5. Механизм-прототип работоспособен только при наличии двух эксцентриков 5 и 6, жестко соединенных совместно сложным соединением, содержащим пустотелую консоль вала 2 с крестообразной внутренней полостью, резьбовую ось 7, соединяющий узел типа "ласточкин хвост", стянутые посредством гайки 16 и резьбы 17.
6. Механизм-прототип ограничен в размерах исполнения, так как увеличение конструкции приводит к несоизмеримому увеличению размеров и масс всех вращающихся и движущихся узлов и деталей, а уменьшение конструкции ограничено невозможностью уменьшения и изготовления пустотелой консоли вала 2 с внутренней полостью крестообразного сечения, в которую должна вставляться резьбовая ось 7 и деталь 14 тоже крестообразного сечения. Крестообразная внутренняя полость консоли вала сложная, нетехнологичная и изготовить ее практически невозможно.
7. В описании механизма-прототипа упоминается, что он предназначен для объемного измерения жидкостей и газов. Однако противоположное несоответствие между площадью поршней 20 и их ограниченным малым рабочим ходом ограничивает его целевое назначение.
8. Из-за наличия всех перечисленных недостатков механизм-прототип невозможно применить для подъема-спуска грузов.
Анализ всех перечисленных недостатков механизма-прототипа приводит к выводу о нецелесообразности преобразования вращательного движения ведущего вала в поступательное перемещение исполнительного звена посредством механизма слишком сложной конструкции и сложнейшей технологии его изготовления, реализация которых не оправдывает своего назначения.
Преобразование вращательного движения ведущего вала в поступательное перемещение исполнительного звена может быть достигнуто более простой конструкцией и большей эффективностью посредством применения изобретения, предлагаемого в настоящей заявке на изобретение с названием "Механизм преобразования вращательного движения в вертикально-поступательное перемещение", показанного на прилагаемых к настоящему описанию чертежах.
На фиг.1 показан "Механизм" в разрезе по А-А на фиг.2.
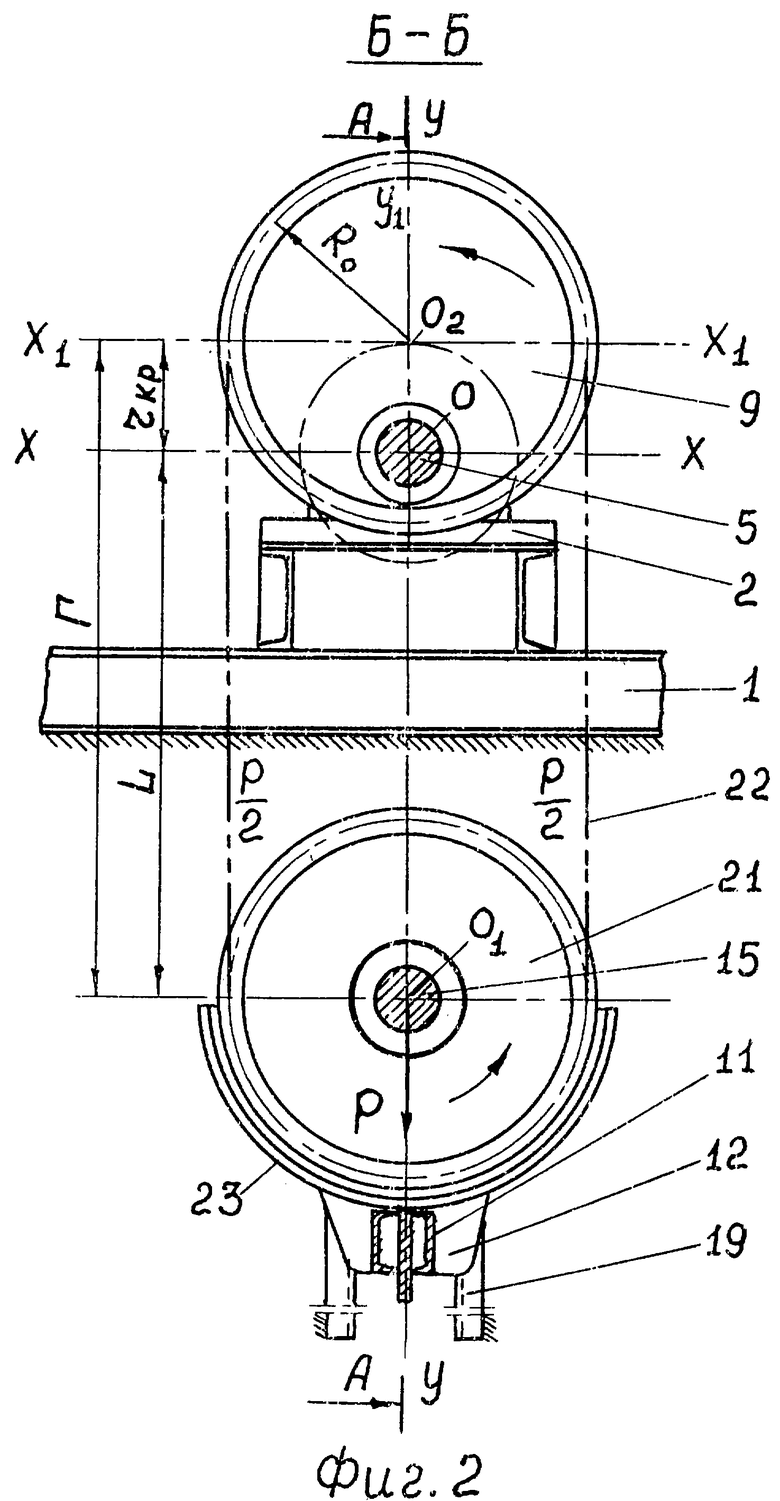
На фиг.2 показан механизм в разрезе по Б-Б на фиг.1.
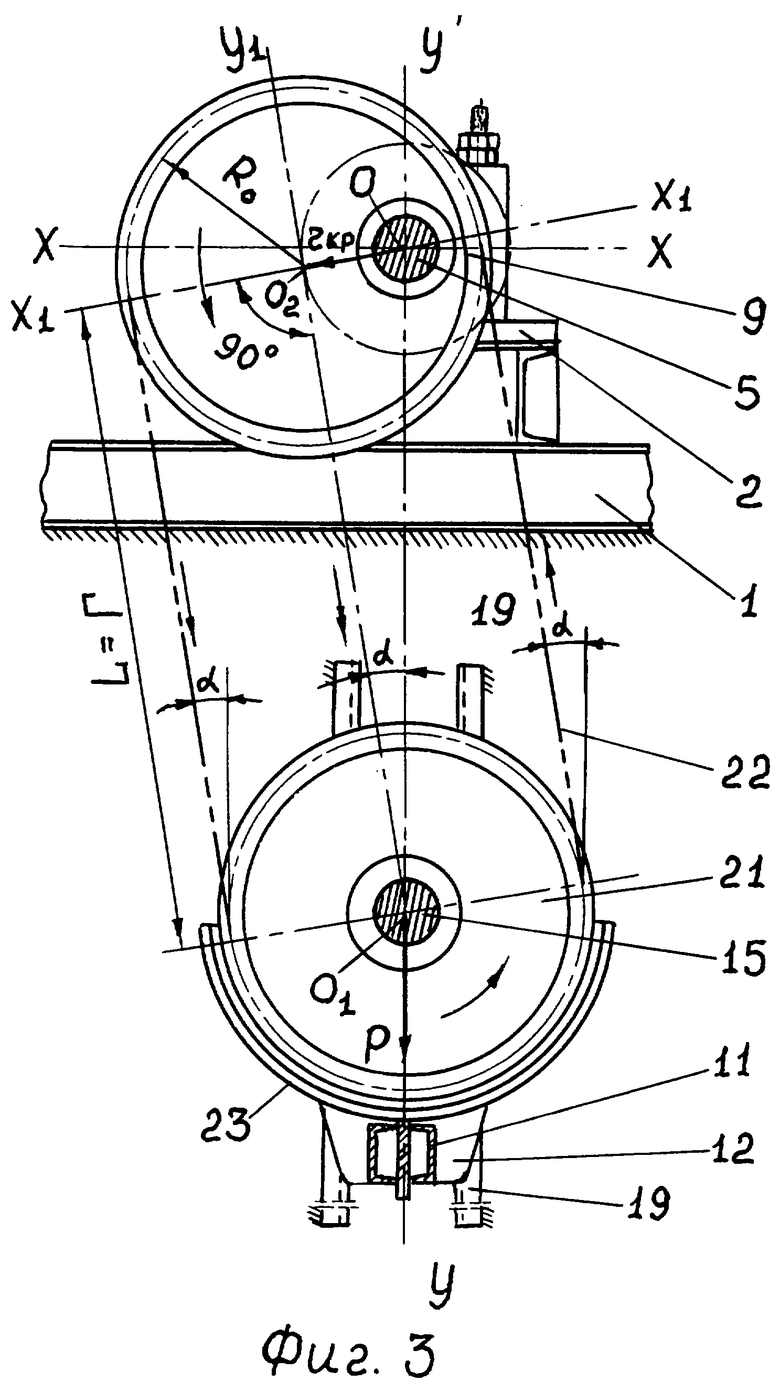
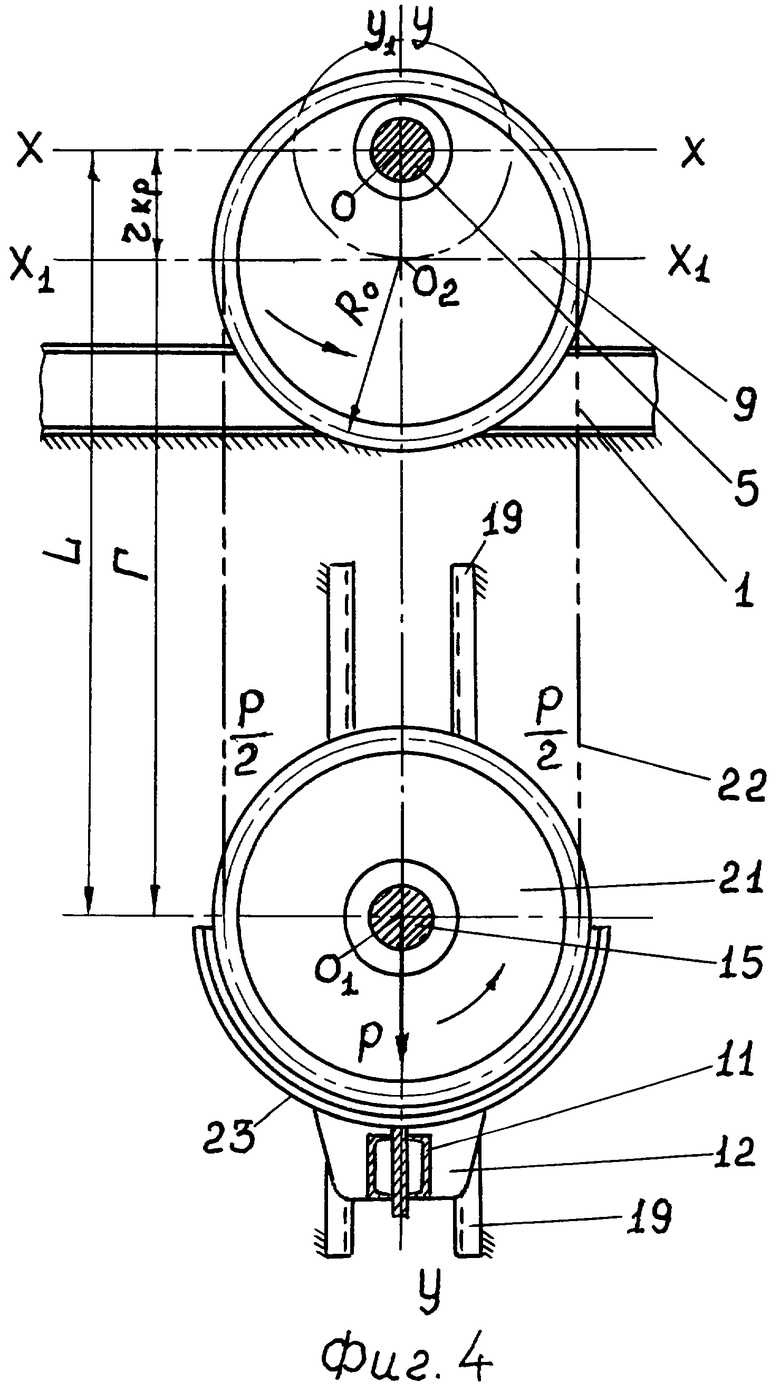
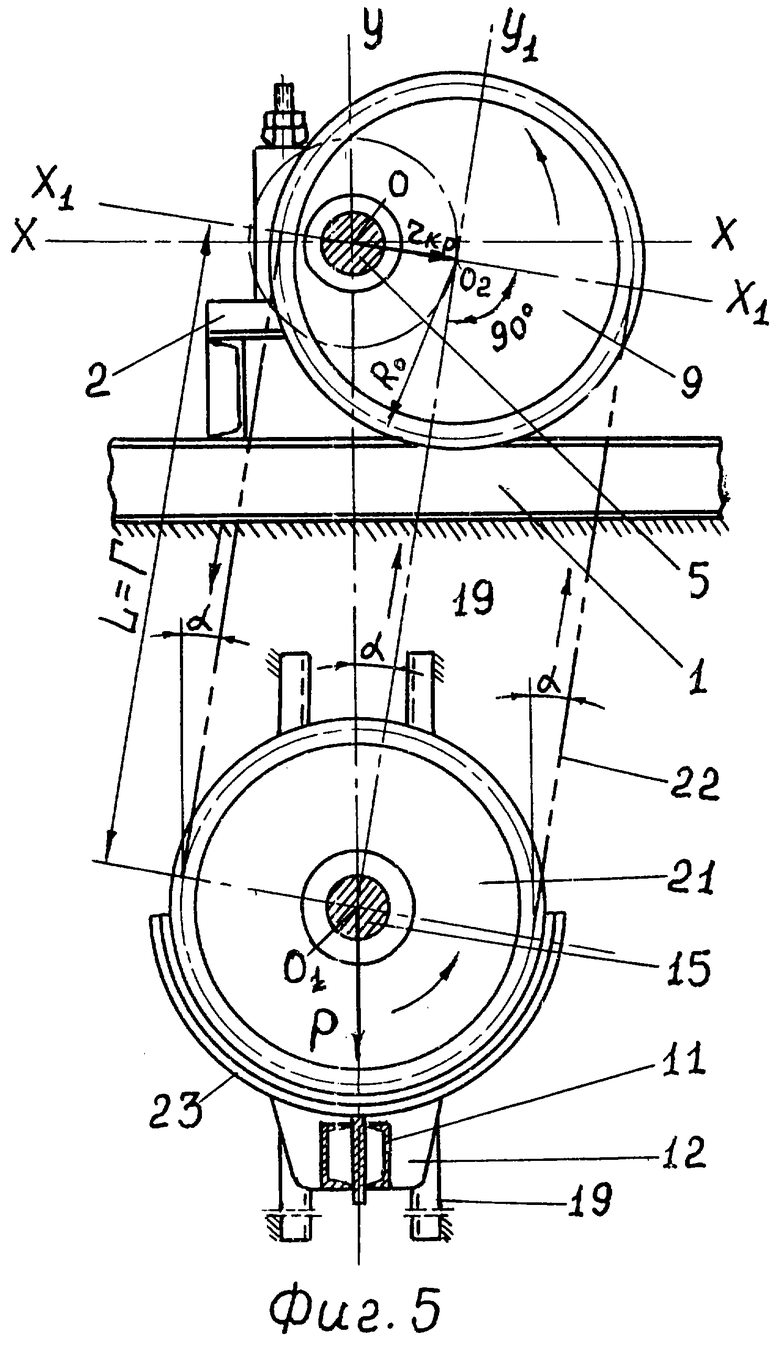
На фиг.3, 4, 5, показаны различные рабочие положения механизма через каждую примерную четверть оборота ведущего вала.
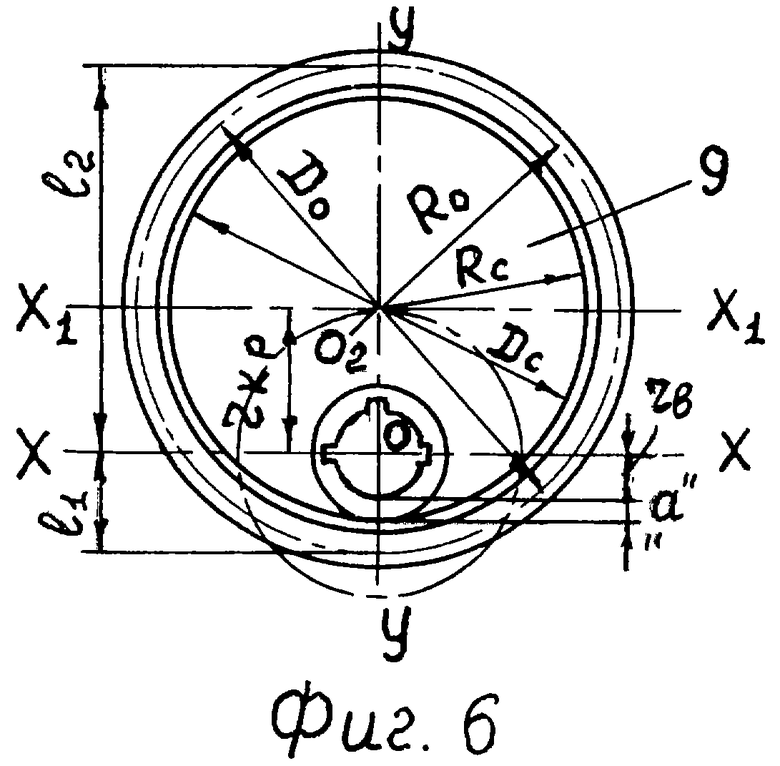
На фиг.6 показан зубчатый эксцентрик.
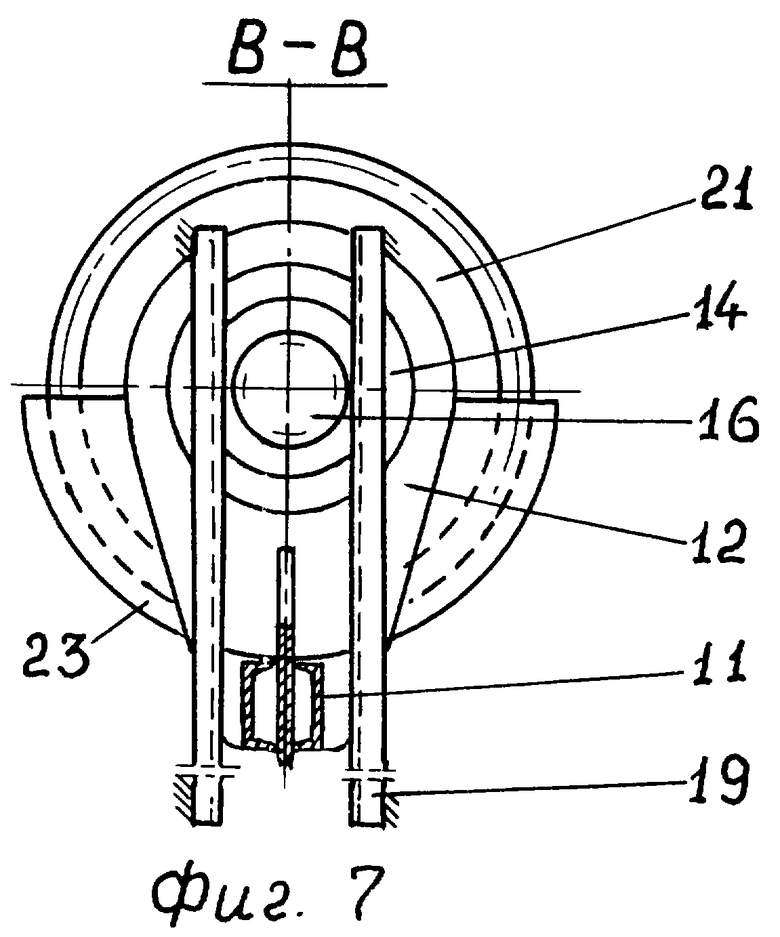
На фиг.7 показан разрез механизма по В-В на фиг.1.
Механизм преобразования вращательного движения в вертикально-поступательное перемещение (далее - заявленный механизм) содержит фундаментную раму 1 с закрепленными на ней корпусами 2 с подшипниками 3, закрытые крышками 4. В подшипники 3 вставлены цельные прямые цилиндрические валы 5, которые посредством муфт 6 жестко соединены в общий прямой вал 5, на котором по всей его длине посредством шпонок 8 жестко закреплены эксцентрики 9 имеющимися в каждом из них эксцентриситетными круглыми отверстиями. А от продольного перемещения вдоль оси вращения вала эксцентрики 9 зафиксированы посредством дистанционных втулок 10.
Каждый эксцентрик 9 (показан на фиг.6) оснащен зубьями для роликовой цепи, которые расположены по окружности делительного диаметра Dо с радиусом Rо, центр окружности которой находится на пересечении вертикальной оси У3.э-У3.э и горизонтальной оси Х1-Х1, а центр круглого эксцентриситетного отверстия, которые зубчатый эксцентрик 9 насаживается на вал 5, наводится на пересечении вертикальной оси У3.э-У3.э и горизонтальной оси Х-Х на расстоянии эксцентриситета, который принято называть радиусом кривошипа rкр. Дополнительно заявленный механизм оснащен подвижным блоком, содержащий траверсу 11, на которой вварены кронштейны 12, в отверстия проушин которых вставлены подшипники 13, закрепленные и закрытые крышками 14. В подшипники 13 вставлена ось 15, на консолях которой размещены ролики 16 насаженные на подшипники 17, закрепленные на концах консолей оси 15 и закрытые крышками 18. Ролики 16 имеют возможность свободного вращения и перемещения в вертикальной плоскости, но ограничены от поперечного перемещения в горизонтальной плоскости посредством вертикально закрепленных параллельных направляющих 19. На среднюю часть оси 15 насажена центральным круглым отверстием и жестко закреплена шпонкой 20 звездочка 21, оснащенная по окружности делительного диаметра зубьями для роликовых цепей, по размерам и шагу зубьев соответствующими размерам, шагу зубьев зубчатого эксцентрика 9, которые совместно охвачены бесконечной роликовой цепью 22, на которой свободно подведен подвесной блок посредством звездочки 21 и с возможностью вертикального перемещения. На траверсе 11 под звездочкой 21 закреплен бачок 23, наполненный машинным маслом до оптимального уровня. На консолях траверсы 11 закреплены тяги 24 гайками 25, являющиеся элементами исполнительного механизма или звена, тяги 24 которых ограничены от раскачивания в горизонтальной плоскости дополнительными роликами 26. В целях безопасности при обрыве или при замене цепи 22 траверса 11 и фундаментная рама 1 соединены гибкой связью в виде троса или цепи 27, отрегулируемых до необходимой длины посредством талрепов 28 на двух гибких связях, закрепленных на двух консолях траверсы 11 и на соответствующих узлах крепления их на фундаментной раме 1.
Механизм преобразования вращательного движения в вертикально-поступательное перемещение работает следующим образом.
На фиг. 1 и 2 показан заявленный механизм в статическом положении в момент, когда центр О2 зубчатого эксцентрика 9, его индивидуальная У3.э-У3.э, центр О продольной оси О-О вращения вала 5, дополнительная ось У1-01 расположены на одной общей вертикальной оси У-У всего механизма. При этом центр О оси вращения О-О вала 5 наводится на пересечении вертикальной оси У-У и горизонтальной оси Х-Х. Центр О2 зубчатого эксцентрика 9 находится на пересечении вертикальной оси У-У и горизонтальной оси Х1-Х1 выше оси Х-Х на расстоянии эксцентриситета или радиуса кривошипа rкр.
Буквой L обозначено расстояние от центра О1 оси 15 до центра О оси вращения вала 5, т.е. до оси Х-X.
Буквой Г обозначено расстояние от центра О1 оси 15 до центра О2 зубчатого эксцентрика 9, т.е. до оси Х1-Х1. В данном положении расстояние Г равно сумме расстояния L и радиуса кривошипа rкр, т.е. Г=L+rкр.
При вращении общего цельного вала 5 вокруг продольной оси О-О закрепленные на общем валу 5 каждый зубчатый эксцентрик 9 тоже вращается вокруг оси О-О вращения вала 5 таким образом, что его центр О2 орбитально вращается вокруг оси О-О вращения вала 5 по окружности с радиусом кривошипа rкр. Но так как цельный вал 5 зафиксирован в подшипниках 3 с возможностью вращения вокруг собственной продольной оси О-О и с возможностью вращения вокруг оси О-О закрепленных на нем эксцентриков 9, то каждый эксцентрик 9 будет поворачиваться вокруг центра О, опускаясь при этом вниз относительно центра О оси О-О, одновременно ослабляя при этом обе ветви бесконечной цепи 22, давая тем самым возможность всему подвижному блоку опускаться вниз под действием его веса вдоль вертикальных параллельных направляющих 19.
Например, на чертежах стрелками указано направление вращения вала 5 против часовой стрелки. Тогда центр О2 зубчатого экецентрика 9, двигаясь орбитально по окружности с радиусом кривошипа rкр, с верхнего положения вала 5 (на фиг. 2) переместится влево и вниз относительно центра О оси вращения О-О вала 5, отклоняя зубчатый эксцентрик 9 и две ветви бесконечной роликовой цепи 22 на соответствующий угол α. На такой же угол наклонится дополнительная ось У1-О1 и перпендикулярная ей ось, одновременно опускаясь вниз относительно центра О оси О-О вращения вала.
На фиг.3 показан момент, когда ось У1-О1 повернулась относительно центра О1 оси 15 на максимальный угол α, а радиус кривошипа rкр совместился с направлением оси Х1-Х1, которая, опускаясь, в этот момент совместилась с центром О оси О-О вращения вала 5, а угол между радиусом кривошипа и осью У1-О1 стал равен α1 = 90° (на чертеже α1 не показана, чтобы не было путаницы). В этот момент зубчатый эксцентрик 9, ось У1-О1 и две ветви роликовой цепи 22 отклонились влево на максимальный угол α относительно вертикальной оси У-У и центра О1 оси 15. А весь подвижный блок под действием собственного веса опустился вниз относительно центра О оси вращения вала 5 вдоль оси У-У на величину радиуса кривошипа rкр, а расстояние L увеличилось на величину радиуса кривошипа rкр, т.е. расстояние L уравнялось c расстоянием Г, т.е. L=Г, а ход подвижного блока S=rкр.
На фиг. 4 показан момент, когда при последующем повороте вала 5 ось У3.э-У3.э эксцентрика 9, ось У1-О1 и центр О2 зубчатого эксцентрика 9 совместились с вертикальной осью У-У, а ось Х1-Х1, опускаясь и поворачиваясь, приняла параллельное положение относительно оси Х-Х ниже центра О вала 5 на расстоянии радиуса кривошипа rкр. В этот момент вал 5 с эксцентриком 9 развернулся на угол β= 180o(на чертеже не показан). Центр O2 зубчатого эксцентрика 9, двигаясь орбитально по окружности с радиусом кривошипа rкр вокруг центра О оси О-О вращения вала 5, достиг вертикальной оси У-У. При этом центр О1 и весь подвижный блок под действием собственного веса переместился поступательно вниз еще на величину S, равную двум радиусам кривошипа, т.е. S= 2rкр. Следовательно, за полоборота вала 5 произошло одностороннее левое качание зубчатого эксцентрика 9, левое качание оси У1-О1 относительно центре О1 оси 15 и полный ход S центра О1 оси 15 и подвижного блока, равный двум радиусам кривошипа, т.е. S=2rкр А расстояние L увеличилось еще на величину радиуса кривошипа rкр, т.е. расстояние L от положения на фиг.2 до положения на фиг. 4 тоже увеличилось на максимальную величину полного хода, равного двум радиусам кривошипа, т.е. Lmax=S=2rкр+L.
На фиг. 5 показан момент, когда при последующем повороте вала 5 ось У1-01, повернувшись относительно центра О1 оси 15, отклонилась вправо на максимальный угол α, радиус кривошипа rкр снова совместился с направлением оси Х1-Х1, которая, поднимаясь, в этот момент совместилась с центром О оси О-О вращения вала 5, а угол между радиусом кривошипа rкр и осью У1-О1 снова стал равен α1= 90o. В этот момент зубчатый эксцентрик 9, ось У1-О1 и две ветви роликовой цепи 22 отклонились вправо на максимальный угол α, центр О1 оси 15 и весь подвижный блок под действием усилия правой ветви роликовой цепи 22 поднялся вверх на величину хода S, равного радиусу rкр кривошипа rкр, т.е. S=rкр. А расстояние L тоже убавилось на величину радиуса кривошипа rкр и стала равно расстоянию Г, т.е. L=Г.
При полном повороте вала 5 вокруг оси О-О на угол β=3600 механизм окажется в первоначальном положении, показанном на фиг.2. Далее все движения повторяются. На фиг. 6 зубчатый эксцентрик 9 имеет плечи l1 и l2, которые относительно центра О при вертикальном положении оси У3.э-У3.э равны между собой и равны радиусу Rо делительной окружности, т.е. l1=l2=Rо, а при повороте вала 5 и зубчатого эксцентрика 9 на угол β=90o, когда ось У3.э-У3.э окажется в горизонтальном положении, то указанные плечи l1 и l2 относительно центра O будут неравны между собой, т.е. l1=R0-rкр, a l2=Ro+rкр. На фиг.1, 2, 3, 4 и 5 буквой Р обозначена суммарная нагрузка на ось 15 от веса подвижного блока и подведенного к нему исполнительного звена. На фиг.1, 2, 4 каждая ветвь роликовой цепи P/2 несет половину общей нагрузки по закону подвижного блока, а на фиг.3 и 5 половинная нагрузка незначительно отличается в зависимости от угла наклона роликовых ветвей цепи 22, поэтому на чертежах не показана. На фиг.6 буквой rв показан размер радиуса вала 5.
Как видно из описания и на прилагаемых чертежах, заявленный механизм при работе преобразует вращательное движение вала 5 в вертикально-поступательное перемещение подвижного блока и исполнительного звена, подсоединенного к подвижному блоку, посредством простейшего способа и посредством простейшей конструкции, имеющей неоспоримые достоинства по сравнению с указанными устройствами и прототипом.
Заявленный механизм имеет следующие достоинства.
1. Передача вращательного движения вала 5 производится с одновременным преобразованием крутящего момента вращения вала 5 в моменты подъема-спуска груза рабочей ветвью бесконечной роликовой цепи 22 подвижного блока с грузом с силой, в два раза меньшей общей нагрузки. При этом каждая ветвь цепи равномерно натянута без какого-либо посредника, например, в виде тележки или подвижной рамы и винтовой пары, оттягивающие посредством отвесного груза, что повышает к.п.д. передачи вращательного движения и упомянутого преобразования.
2. Общий максимальный момент относительно центра О оси О-О вращения вала 5 необходим только в моменты, когда ось У3.э-У3.э эксцентрика 9 и радиус кривошипа одновременно совпадают с направлением оси Х1-Х1, а радиус кривошипа при этом моменте перпендикулярен оси У1- О1, т.е. при α1=90o. Только в эти два момента при каждом обороте вала 5 и зубчатых эксцентриков общий максимальный момент равен алгебраической сумме трех моментов
А в моменты поворота вала 5, когда угол поворота β=0o(360o) или β=180o, необходимый минимальный крутящий момент для преобразования вращательного движения в вертикально-поступательное перемещение в моменты, кода центр О2 каждого зубчатого эксцентрика 9 будет находиться на общей вертикальной оси У-У, с которой также вертикально совпадают ось У-У и радиус кривошипа при углах поворота вала 5 β=180o или β=360o, то крутящий момент будет равен: Мкр.m=Мкр.тр=Р•γ, где
l1 - минимальное плечо приложения силы на одну ветвь роликовой цепи 22 относительно центра О оси О-О;
l2 - максимальное плечо приложения силы на другую ветвь роликовой цепи 22 относительно центра O оси О-О;
P/2 - половина нагрузки на каждую ветвь цепи 22;
Мкр1 - момент кручения половины нагрузки P/2 на плечо l1 относительно центра O оси O-O;
Мкр2 - момент кручения половины нагрузки P/2 на плечо l2 относительно центра O оси O-O;
Мкр.об - общий максимальный крутящий момент вала 5;
Мкр.m - минимальный крутящий момент вала 5;
Rо - радиуc делительной окружности зубчатого экcцентрика 9;
rкр- радиус кривошипа (эксцентриситет) зубчатого эксцентрика;
γ - коэффициент трения качения.
3. Отпадает необходимость устанавливать натяжку бесконечной цепи 22 по максимальной передаваемой нагрузке, что тоже повышает к.п.д. преобразования вращательного движения в вертикально-поступательное перемещение.
4. Отпадает необходимость в дополнительных натяжных устройствах для сохранения постоянного межцентрового расстояния между центром вращения вала 5 и центром вращения подвижного блока с подвешенным исполнительным звеном.
5. В заявленном механизме каждый зубчатый эксцентрик 9 снабжен круглым отверстием, которым он жестко закреплен на валу 5 и центр которого совмещен с центром О оси О-О вращения вала 5 на расстоянии постоянного эксцентриситета (радиуса кривошипа) от центра О2 зубчатого эксцентрика 9. Поэтому физического радиуса в виде отдельного рычага, подобного в кривошипных механизмах, не существует. А функции радиуса кривошипа выполняет межцентровое расстояние между центром О вращения вала 5 и центром О2 зубчатого эксцентрика 9. Функции физического радиуса кривошипа фактически выполняет непосредственно жесткое тело зубчатого эксцентрике 9, примененного в качестве кривошипа.
6. В заявленном механизме межцентровое расстояние обладает функциональной возможностью постоянно увеличиваться и уменьшаться на величину, равную двум радиусам кривошипа при каждом обороте ведущего вала 5. Эта возможность используется для подъема-спуска подвижного блока с грузом или с исполнительным механизмом с наибольшей эффективностью.
7. Сохраняется полезное во многих случаях отношение времени обратного хода То.х времени прямого хода Тп.х, которое равно единице, т.е. То.х:Тп.х= 1.
8. Максимальный или минимальный эксцентриситеты зависят только от диаметров проточки Dc зубчатого эксцентрика 9, радиусы Rс которые больше суммы радиуса кривошипа и радиуса вала 5 на величину оставшейся перемычки "а", от площади сечения которой все диаметральные размеры зубчатого эксцентрика 9 определяются и показаны на фиг.6.
9. Зубчатый эксцентрик 9 жестко закреплен на валу, например, шпонками 8, а при необходимости он может быть даже приварен намертво к валу 5, чем определяется возможность передачи валом 5 наибольшего крутящего момента.
10. Зубчатый эксцентрик 9, средства его крепления на валу, звездочка 21 подвижного блока и бесконечная цепь 22 находятся в одной плоскости, что позволяет разместить и жестко закрепить на одном совместном валу 5 наибольшее количество заявленных механизмов.
11. Заявленный механизм ничем не ограничен в размерах при его изготовлении различного масштаба, что позволяет реализовать широкие пределы передаваемой мощности при подъемах-спусках грузов.
12. Зубчатый эксцентрик 9 может иметь несколько эксцентриситетных отверстий, которые могут иметь разные радиусы rкр кривошипов и соответствующие им равные перемещения грузов.
13. Срок безремонтной работы заявленного механизма зависит только от износоустойчивости зубчатого эксцентрика 9, звездочки 21 подвижного блока и роликовой цепи 22. Поэтому на траверсе 11 установлен бачок с машинным маслом, которым обильно смазываются и промываются зубья зубчатого эксцентрика 9, зубья звездочки 21 и элементы роликовой цепи 22, чем значительно удлиняется срок безремонтной работы заявленного механизма в течение нескольких лет.
Заявленный механизм обладает единственным недостатком, который заключается в том, что его нельзя использовать для преобразования возвратно-поступательного перемещения во вращательное движение ведомого вала 5 без применения дополнительных узлов и деталей, которые значительно снижают эффективность преобразования.
Однако этот единственный недостаток не препятствует широкому применению заявленного механизма для приводов многих устройств и механизмов, для которых названный недостаток не имеет никакого отрицательного значения при выполнении эффективной работы.
Например, известны изобретения под общим названием "Механическая лестница", на которые были выданы и давно опубликованы пять авторских свидетельств СССР: М. кл. В 66 В 21/08, 1248926 (46) 07.08.86. Бюл. 29, 1341141 (46) 30.09.87. Бюл. 36, 1377237 (46) 29.02.88. Бюл. 8, 1495258 (46) 23.07.89. Бюл. 27, 1684223 (46) 15.10.91. Бюл. 38, автором которых является автор настоящей заявки.
"Механическая лестница" пока теоретически признана новым видом вертикального транспорта.
В нерабочем состоянии она представляет собой обычную стационарную лестницу, которую жители многоэтажных домов видят, пользуются ею в каждом подъезде.
Каждый марш механической лестницы содержит чередующие неподвижные и подвижные ступени, которые во время работы попеременно уравниваются между собой, с неподвижными ступенями, с междуэтажными и этажными площадками, перемещаются вертикально возвратно-поступательно по закону гармонических колебаний. В моменты указанных уравниваний скорость вертикального перемещения подвижных ступеней равна нулю или около нуля. В эти моменты пассажиры переходят с предыдущих подвижных ступеней на последующие ступени, или наоборот, или на упомянутые площадки. Весовой принцип работы механической лестницы посредством вертикально-возвратно-поступательных перемещений попарно уравновешенных подвижных ступеней в каждом лестничном марше на всех этажах одновременно позволяет производить подъем-спуск одними и теми же маршами тоже одновременно на всех этажах непрерывного потока пассажиров разных категорий, пола, возраста, здоровья и разных интеллектуальных возможностей. При этом потоки пассажиров могут быть на одних и тех же маршах в виде двух встречных непрерывных потоков или в виде одного непрерывного потока, двигающегося вверх или вниз. Весовой принцип работы механической лестницы способствует тому, что расход электроэнергии на одного пассажира может быть в десятки раз меньше, чем расходуется электроэнергии при работе лифтов, в сотню раз меньше, чем расходуется при работе эскалатора. Пассажиры, спускающиеся сверху вниз, своим весом и весом груза будут "помогать" приводу поднимать пассажиров, поднимающихся вверх. Когда же количество опускающихся вниз будет преобладать над количеством пассажиров, поднимающихся вверх, то двигатель привода будет работать в режиме генератора. Механическая лестница в виде отдельно стоящего сооружения, или в виде предподъездного пристроя, или встроенного в подъезд здания вместо лифта и стационарной лестницы обеспечит абсолютную безопасность пассажиров во время повседневной эксплуатации механической лестницы и во время стихийных бедствий (пожары, землетрясения и т.д.). Простая по конструкции, дешевая при строительстве, при эксплуатации и обслуживании, сравнительно высокая производительность (до 4000 чел/ч) - все это ставит вопрос о нецелесообразности дальнейшей эксплуатации существующих и строительства новых лифтов до двадцати этажей зданий и даже эскалаторов, особенно на окраинах городов, где интенсивность людских потоков значительно меньше. А при расширении городских окраин легче и быстрее построить дополнительную механическую лестницу, чем строить эскалаторы, которые перемещают пассажиров только в одном направлении, зачастую мало загруженные, размещенные в слишком дорогих вестибюльных станциях и занимающие большую городскую площадь, при этом каждая станция должна иметь до шести эскалаторов, а одна механическая лестница, перемещая пассажиров одновременно в оба направления, при оптимальной допустимой интенсивности людских потоков сможет заменить два рабочих и третий запасной эскалатор.
Механические лестницы, построенные в виде предподъездных пристроев к зданиям, позволят демонтировать лифты и стационарные лестницы, а за счет высвободившейся полезной площади любой город сможет увеличить дополнительную жилую площадь без больших затрат, без изменения размеров существующих зданий. А вместе с дополнительными отдельными сооружениями, оснащенными механическими лестницами, любой город сможет изменить свой внешний облик. А в гористых или на равнинных местностях построенные механические лестницы имеют вид башен оптимальных высот, надземных или подземных переходов или вид вертикальных шахт до сорока и более метров с возможностью выхода-входа в обустроенное подземное пространство на высоте (глубине) любого этажа. Такая возможность позволяет в будущем освоить подземное пространство для жилья и места работы в более экономичных и даже комфортных условиях. Поэтому ускоренное освоение нового вида вертикального транспорта в ближайшее время даст возможность уже в первом десятилетии XXI века оснастить механическими лестницами множество жилых и административных зданий. И не исключена возможность начала смены облика городов: в обозримом будущем новый вид вертикального транспорта позволит за короткие сроки и с минимальным количеством проблем уплотнить города путем освоения подземного пространства в глубь земли, а всему человечеству навсегда отказаться от строительства дорогостоящих, не оправдавших себя небоскребов.
Однако прошло более четырнадцати лет с момента опубликования первого варианта и девять лет с момента опубликования пятого варианта механических лестниц, а перспективные изобретения не внедряются в жизнь по следующим причинам.
Знакопеременные вертикальные возвратно-поступательные перемещения подвижных ступеней должны производиться строго по закону гармонических движении со средней скоростью до 0,4 м/с, изменяясь от нуля до определенной скорости и от определенной скорости до нуля. А в моменты уравнивания проступей подвижных ступеней с проступенями соседних неподвижных ступеней или с плоскостями междуэтажных и этажных площадок при нулевой скорости подвижных ступеней пассажиры смогут переходить с предыдущих ступеней или площадок на последующие ступени или площадки.
Поэтому механическая лестница должна быть оснащена таким подъемным механизмом, который совместно с любым приводом вращения, преимущественно с электроприводом, должен будет поднять максимально возможное число пассажиров в виде непрерывного потока, поднимающегося одновременно только вверх, когда приводу придется поднять одновременно общий вес пассажиров, преодолевая силу Земного притяжения, или "мягко" опустить максимально возможное число пассажиров в виде непрерывного потока, опускающегося только вниз, когда приводу придется удерживать одновременно общий вес пассажиров без ощутимого ускорения, который под воздействием тоже Земного притяжения будет ускоренно стремиться двигаться вниз, а в моменты смены знака движения вниз - в крайнем нижнем положении всех опустившихся подвижных ступеней с пассажирами "безударно и мягко" для пассажиров должны быть погашены инерционные силы путем постоянного переноса их в любое мгновение времени механизмом на каркас механической лестницы. Хотя и очень редко, но суммарный вес одновременно поднимающихся всех пассажиров или одновременно опускающихся вниз всех пассажиров в некоторые моменты может исчисляться тоннами.
Например, десятиэтажная механическая лестница сможет поднять-опустить 72 пассажира за полторы-две минуты. Вес каждого пассажира принят условно в России Р=80 кг. Тогда общий вес пассажиров будет: Роб= 80•72=5760 кг.
К этому весу прибавится вес маршевых рам с подвижными ступенями, из которых четыре работают на подъем и четыре на спуск. На каждой маршевой раме на девяти ее ступенях по этажам может подниматься одновременно 18 пассажиров, т. е. по два пассажира на каждой ступени. Все восемь маршевых рам будут подвешены к индивидуальным восьми заявленным механизмам, на каждый из которых придется нагрузка с инерционными силами около двух тонн, которые каждый механизм пересилит без особого напряжения с большим запасом прочности, "мягко" поднимая-опуская каждую маршевую раму с "нежным" интеллектуальным грузом. Этому будет способствовать гибкая связь в виде бесконечной роликовой цепи 22, каждая ветвь которой воспринимает только половину максимальной нагрузки, которая может случиться даже в часы "пик" при случаях не более 10% от всего рабочего времени механической лестницы, которая будет постоянно работать в режимах уравновешивания всех пассажиров в двух встречных потоках. А половину всего рабочего времени привод механической лестницы будет работать в режиме генераторного торможения.
Вертикальные возвратно-поступательные перемещения маршевых рам с пассажирами будут происходить "безударно и мягко" только потому, что ролики роликовой цепи 22, несущие нагрузку в любой момент вращения вала 5 и зубчатого эксцентрика 9, всегда находятся во впадинах (диаметр впадин Dвп) зубчатого эксцентрика 9 только сверху посредством цепи 22, которая переносит всю нагрузку на вал 5, на коренные подшипники 3 с корпусами 2, на фундаментную раму 1 и на весь каркас механической лестницы, воспринимающий всю нагрузку, которая распределяется по всей высоте каркаса всеми узлами подвески.
Ветви цепи 22 равномерно несут только половину максимальной нагрузки P/2, чем обеспечивается необходимый запас прочности. А абсолютная безопасность при работе заявленного механизма обеспечивается дополнительными гибкими связями 27, длина которых больше максимального расстояния между подвижным блоком и фундаментной рамой на необходимую величину.
Дополнительное описание конструкции и работы механической лестницы в настоящей заявке крайне необходимо для доказательства необычной значимости заявленного механизма и необходимости его применения в самое ближайшее время и обязательной защиты его охранным документом - Российским патентом на изобретение "Механизм преобразования вращательного движения в вертикально-поступательное перемещение".
Ко всему изложенному необходимо еще добавить и экономическую часть при изготовлении простейшего механизма и его наивысшую эффективность в период эксплуатации заявленного механизма при следующих обстоятельствах.
Ранее отмечалось, что... "В подшипники 3 вставлены цельные прямые цилиндрические валы, которые посредством муфт 6 жестко соединены в общий прямой вал 5, на котором по всей его длине посредством шпонок 8 жестко закреплены эксцентрики 9 имеющимися в каждом из них эксцентриситетными круглыми отверстиями. А от продольного перемещения вдоль оси вращения вала эксцентрики 9 зафиксированы посредством дистанционных втулок 10". При этом необходимо отметить, что валы 5 жестко соединены в общий вал 5 посредством муфт 6 и шпонок 7. Такая конструкция составного вала в один общий вал 5 показана только с целью удобства и облегчения изготовления, монтажа и демонтажа всего привода, в составе которого имеются заявленные механизмы.
Однако при любой необходимости вал 5 может быть изготовлен и применен цельным по всей необходимой длине без каких-либо муфт 6 и шпонок 7.
И в первом разборном виде, и во втором неразборном виде вала 5 на нем также по всей его длине посредством шпонок 8 жестко закреплены зубчатые эксцентрики 9 имеющимися в каждом из них эксцентриситетными круглыми отверстиями. При этом заявленные механизмы размещены по всей длине любой конструкции прямого цельного цилиндрического вала 5 и взаимно уравновешены между собой посредством закрепления каждого зубчатого эксцентрика 9 с поворотом одних относительно соседних других на угол 180o при четном количестве зубчатых эксцентриков 9 или с поворотом на угол 120o при общем нечетном количестве зубчатых эксцентриков 9, но делящихся на три.
Указанным условием монтажа зубчатых эксцентриков 9 достигается взаимное уравновешивание заявленных механизмов с подвешенными к ним соответствующими по весу грузами
Например, в приводах механических лестниц, в составе которых будут применены заявленные "Механизмы преобразования вращательного движения в вертикально-поступательное перемещение" в состав груза "Р" будут входить: вес подвижного блока с траверсой 11, вес маршевой рамы с подвижными ступенями и переменный общий вес всех одновременно пассажиров, поднимающихся вверх (Пп), или переменный общий вес всех одновременно пассажиров, опускающихся вниз (По) на других уравновешенных подвижных ступенях каждого марша.
При различных 50% всех случаев сочетаний между количествами одновременно поднимающихся и опускающихся пассажиров, когда количество всех одновременно пассажиров, опускающихся вниз (По), преобладает над количеством всех одновременно пассажиров, поднимающихся вверх (Пп), тогда электродвигатель привода будет работать в режиме генератора торможения.
А в остальных 50% всех случаев сочетаний, когда количество пассажиров, поднимающихся вверх (Пп), больше количества пассажиров, опускающихся вниз (По), тогда при любых сочетаниях количества упомянутых пассажиров расход электроэнергии будет увеличиваться на соответствующее преобладающее число пассажиров, поднимающихся вверх (Пп), над меньшим числом пассажиров, опускающихся вниз (По).
Это подтверждается двумя расчетными таблицами в составе настоящих дополнительных материалов.
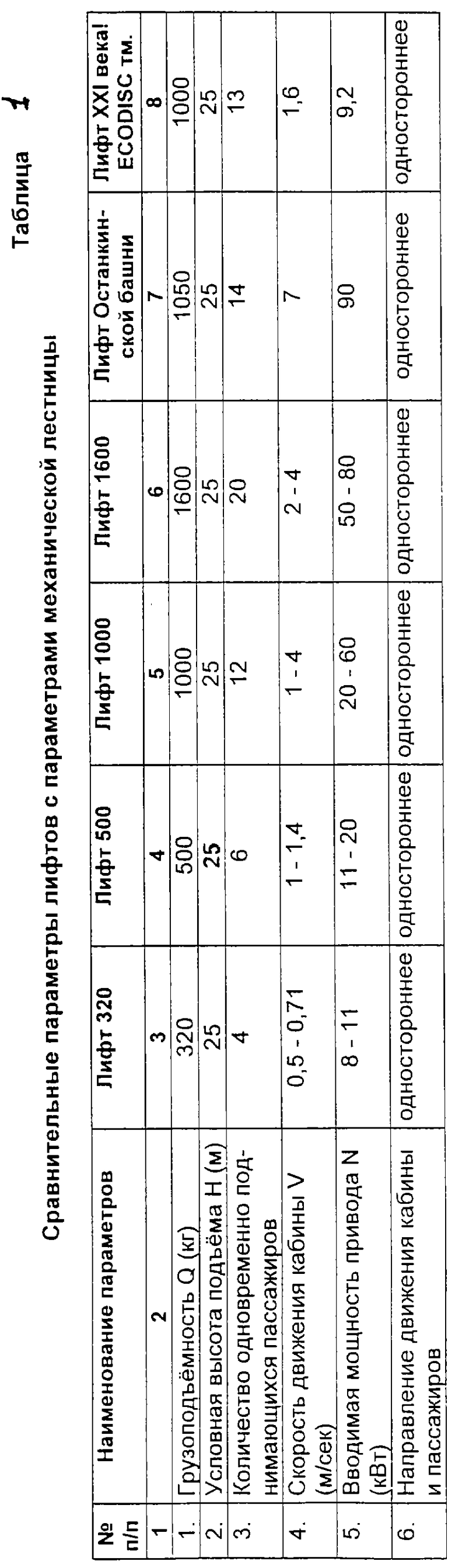
В табл. 1 представлены "Сравнительные параметры лифтов с параметрами механической лестницы", сравнение с которыми подразумеваются параметры десятиэтажной механической лестницы: грузоподъемность - Q (кг), условная высота Н (м), количество одновременно поднимающихся пассажиров (Пп), количество одновременно опускающихся пассажиров (По), скорость подъема-спуска V (м/с) и вводимая мощность привода N (кВт).
В табл. 1 также представлены сравнительные параметры широко известных видов лифтов грузоподъемностью Q - 320, 500, 1000, 1600, 1050, 1000 (кг), предназначенных для подъема соответствующего количества пассажиров К = 4, 6, 12, 20, 14, 13 человек посредством соответствующей вводимой максимальной мощности привода N = 11, 20, 60, 80, 90, 92 (кВт).
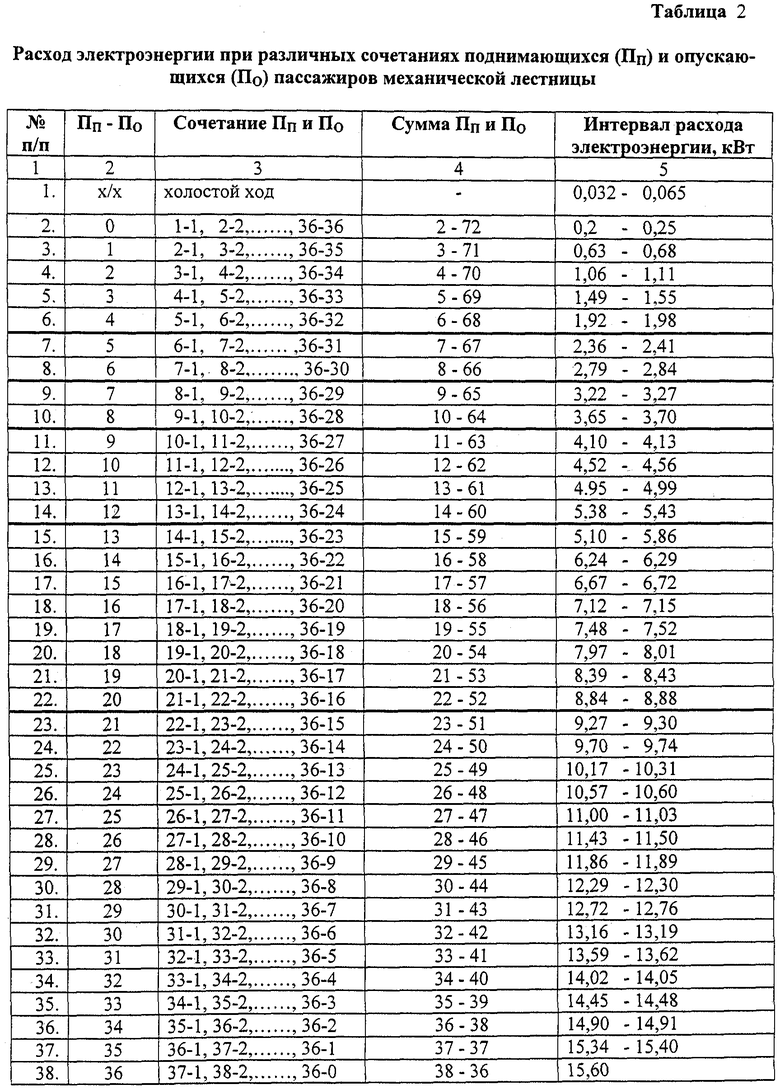
В табл. 2 представлен расчетный "Расход электроэнергии при различных сочетаниях поднимающихся (Пп) и опускающихся (По) пассажиров механической лестницы".
В графе 1 указан порядковый номер.
В графе 2 указано, на какое число поднимающихся пассажиров (Пп) больше опускающихся вниз пассажиров (По).
В графе 3 перечислены все сочетания количества поднимающихся вверх пассажиров (Пп) (левая цифра) и все сочетания количества одновременно опускающихся вниз пассажиров (По) (правая цифра).
В графе 4 левая цифра соответствует порядковому номеру, а правая цифра показывает сумму всех одновременно поднимающихся вверх пассажиров (Пп) и всех одновременно опускающихся пассажиров (По) вниз.
В графе 5 показан интервал расхода электроэнергии N (кВт) согласно сочетаниям общего количества всех пассажиров.
Более темной чертой подчеркнуты сочетания и расход электроэнергии на лифты для подъема количества одновременно поднимающихся пассажиров К = 4, 6, 12, 20 человек.
В табл. 1 приведены параметры одного лифта Останкинской башни в графе 7, а в графе 8 приведены параметры лифта ECODLSCTM в качестве сопоставления лифтов второй половины ХX века и достигнутого уровня лифта ХXI века.
На основании только этих параметров можно определить, во сколько раз эффективнее эксплуатация механической лестницы, оснащенной в составе ее привода заявленными механизмами, если сопоставить параметры механической лестницы с параметрами только шести видов лифтов.
Например, при двухстороннем движении потока пассажиров при равном уравновешенном количестве одновременно поднимающихся вверх пассажиров (Пп) и одновременно опускающихся вниз пассажиров от 2-х до 72-х (по 36 чел.), расход электроэнергии не превысит N = 0,25 (кВт).
При превышении количества пассажиров, поднимающихся вверх (Пп), по отношению к количеству пассажиров, опускающихся вниз (По), произойдет следующее: расход электроэнергии на 4 человека до общего количества в 68 человек при любых сочетаниях будет N=(8-11):(1,92-1,98) меньше в 4,17 - 5,56 раза, где в первых скобках - пределы вводимой мощности привода N (кВт) лифта грузоподъемностью Q= 320 кг, а во вторых скобках - пределы интервала расхода электроэнергии привода N (кВт) десятиэтажной механической лестницы (в табл. 2)
Количество одновременно поднимаемых-опускаемых пассажиров приводом механической лестницы с заявленными механизмами К=(68:4) больше в 17 раз, где 68 - наибольшее количество пассажиров (при сочетании Пп=36 и По=32).
Соответствующая грузоподъемность механической лестницы Q=(5440:320) больше в 17 раз 5440 кг - вес 68 пассажиров (68х80 кг), Q=320 - грузоподъемность лифта (4х80 кг), где 80 кг - условный вес 1 пассажира.
На 6 человек
N=(11-20):(2,79-2,84) меньше в 3,94-7 раз.
К=66:6 = больше в 11 раз.
Q=(5280:500) больше в 10,56 раза.
На 12 человек
N=(20-60):(5,38-5,43) меньше в 3,7-11 раз.
К=60:12 больше в 5 раз.
Q=4800:1000 больше в 4,8 раза.
На 20 человек
N=(50-80):(8,84-8,88) меньше в 5,66-9 раз.
К=52:20 больше в 2,6 раза.
Q=4160:1600 больше в 2,6 раза.
На 14 человек
N=90:(6,24-6,29) меньше 14,4-14,3 раза.
К=58:14 больше в 4,14 раза.
Q=4640:1050 больше в 4,42 раза.
На 13 человек - лифт XXI века!
N=9,2:(5,1-5,86) меньше в 1,8-1,57 раза.
К=59:13 больше в 4,54 раза.
Q=4720:1000 больше в 4,72 раза.
При этом необходимо еще отметить, что современные лифты и лифты XXI века были и будут прерывные, с односторонним движением кабины и пассажиров, с минимальным допустимым количеством их в одной кабине, с потерей времени на разгон, торможение кабины, входа-выхода пассажиров из кабины - в кабину, на дверные операции и дополнительные затраты времени при работе лифтов.
Все эти и другие недостатки исключаются при работе механической лестницы при непрерывном подъеме-спуске непрерывного потока пассажиров одновременно в оба направления.
Поэтому производительность подъема-спуска количества пассажиров в час посредством механической лестницы ориентировочно больше производительности лифта в 30-40 раз.
Представленные неполные простейшие расчеты выявили парадоксальную эффективность применения заявленного "Механизма преобразования вращательного движения в вертикально-поступательное перемещение" в составе привода механической лестницы - нового вида вертикального транспорта, когда при наименьшем расходе электроэнергии одновременно поднимается-опускается наибольшее количество пассажиров с наибольшей грузоподъемностью.
Еще большая эффективность в экономии электроэнергии сохраняется при замене эскалаторов механическими лестницами.
Прeдставленная возможность наиболее широкого применения заявленного механизма с наибольшей эффективностью в составе приводов механических лестниц этим не ограничивается.
Применение заявленного механизма в составе приводов механических лестниц не уменьшает безопасность подъема-спуска пассажиров при случаях долговременного износа или обрыва бесконечной роликовой цепи 22, работающей с меньшей нагрузкой в два раза и подстрахованной двумя тросами или цепями 27, изгибающиеся без нагрузки. Основная безопасность заложена в самой конструкции механических лестниц, в которых под каждой подвижной ступенью 7 жестко закреплены балочки 5 и амортизаторы 33 по всей высоте подвижных лестничных маршей 6, содержащих подвижные ступени 7 в количестве, соответствующем количеству этажей механической лестницы (Авт. св. 1495258 А2, В 66 В 21/08, 23.07.1989 г. Бюл. 27).
Заявленный механизм может найти широкое применение в составе эффективных приводов различного вида шаговых подъемников или шаговых конвейеров.
Поэтому заявленный "Механизм преобразования вращательного движения в вертикально-поступательное перемещение" в виде наипростейшей конструкции должен быть защищен охранным документом - Российским патентом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСЦЕНТРИКОВЫЙ ШАТУН | 1999 |
|
RU2178106C2 |
| ГИДРОМАШИНА | 2002 |
|
RU2234617C2 |
| Механическая лестница | 1989 |
|
SU1684223A1 |
| Механическая лестница | 1987 |
|
SU1495258A2 |
| Механическая лестница | 1985 |
|
SU1341141A1 |
| Механическая лестница | 1984 |
|
SU1248928A1 |
| Механическая лестница | 1984 |
|
SU1377237A2 |
| Ветродвигатель | 1983 |
|
SU1173059A1 |
| Секторный накопитель | 1985 |
|
SU1321647A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С УСТРОЙСТВОМ НЕЙТРАЛИЗАЦИИ РАДИАЛЬНОЙ НАГРУЗКИ ОТ КОНТАКТИРУЮЩИХ ЗУБЬЕВ | 2017 |
|
RU2668451C1 |
Изобретение относится к грузоподъемным машинам для вертикального одновременного подъема-спуска груза на определенную высоту. Технический результат - упрощение конструкции и повышение эффективности работы. Механизм содержит раму, на которой в подшипниках установлен вал, образованный несколькими цилиндрическими валами. На валу размещены эксцентрики с отверстиями, центры которых расположены на оси вращения вала. Эксцентрики оснащены зубьями для роликовой цепи. Каждый зубчатый эксцентрик оснащен подвижным блоком, имеющим возможность вертикального перемещения и связанным с исполнительным звеном. Между подвижным блоком и рамой механизма имеются гибкие связи. 7 ил., 2 табл.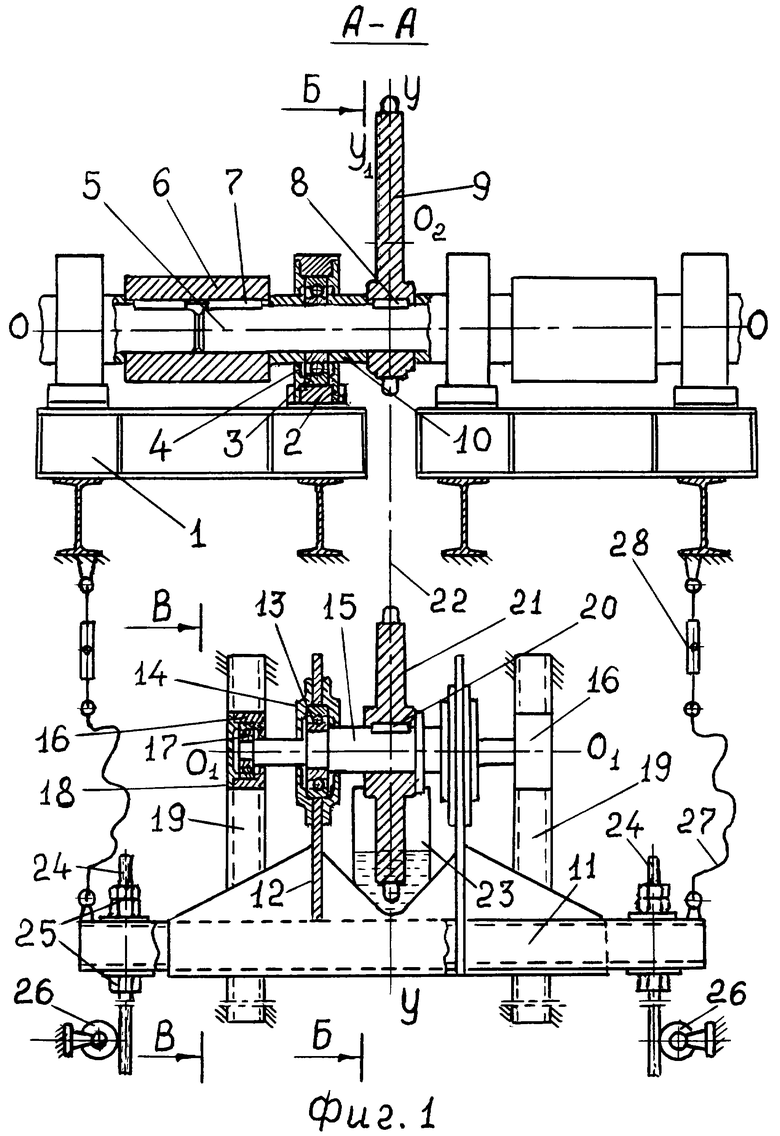
Механизм преобразования вращательного движения в вертикально-поступательное перемещение, содержащий вал с закрепленными на нем эксцентриками и подвижный блок, отличающийся тем, что на фундаментной раме закреплены корпуса с подшипниками, в которые вставлены цилиндрические цельные валы, соединенные жестко, например посредством муфт, в один цельный прямой цилиндрический вал, на котором по всей его длине размещены эксцентрики, каждый из которых снабжен круглым отверстием, которым каждый эксцентрик насажен на вал и жестко закреплен на нем, при этом центр каждого отверстия расположен на оси вращения вала и на расстоянии эксцентриситета, являющийся радиусом кривошипа, от оси вращения вала до центра эксцентрика, каждый из которых оснащен зубьями для роликовой цепи, расположенными по окружности делительного диаметра зубчатого эксцентрика, радиус диаметра проточки которого больше суммы радиуса кривошипа и радиуса вала, при этом каждый зубчатый эксцентрик оснащен подвижным блоком, содержащим траверсу, на которой жестко закреплены кронштейны, в проушины отверстий которых вставлены подшипники, в них вставлена ось, на ее консоли насажены ролики с возможностью свободного вращения вокруг ее оси и с возможностью перемещения в вертикальной плоскости, но ограниченные от перемещения в горизонтальной плоскости параллельными вертикальными направляющими, а на средней части оси жестко закреплена центральным круглым отверстием звездочка с зубьями, размещенными по окружности ее делительного диаметра, размеры и шаг которых соответствуют размерам и шагу зубчатого эксцентрика, зубья которого совместно с зубьями звездочки охвачены общей бесконечной роликовой цепью, на которой посредством упомянутой звездочки шарнирно подвешен подвижный блок с подсоединенным к нему исполнительным звеном, ограниченным от колебаний в горизонтальной плоскости дополнительными роликами, а абсолютная безопасность при работе механизма обеспечена дополнительными гибкими связями, длина которых больше максимального расстояния между подвижным блоком и фундаментной рамой на необходимую величину.
| Электромеханическая игра | 1988 |
|
SU1517970A1 |

