Изобретение относится к металлургии, в частности к устройствам автоматизации процесса непрерывного лить при стопорном дозировании из металлургического ковша.
Цель изобретения - повьппение надежности работы механизма и удобства эксплуатации.
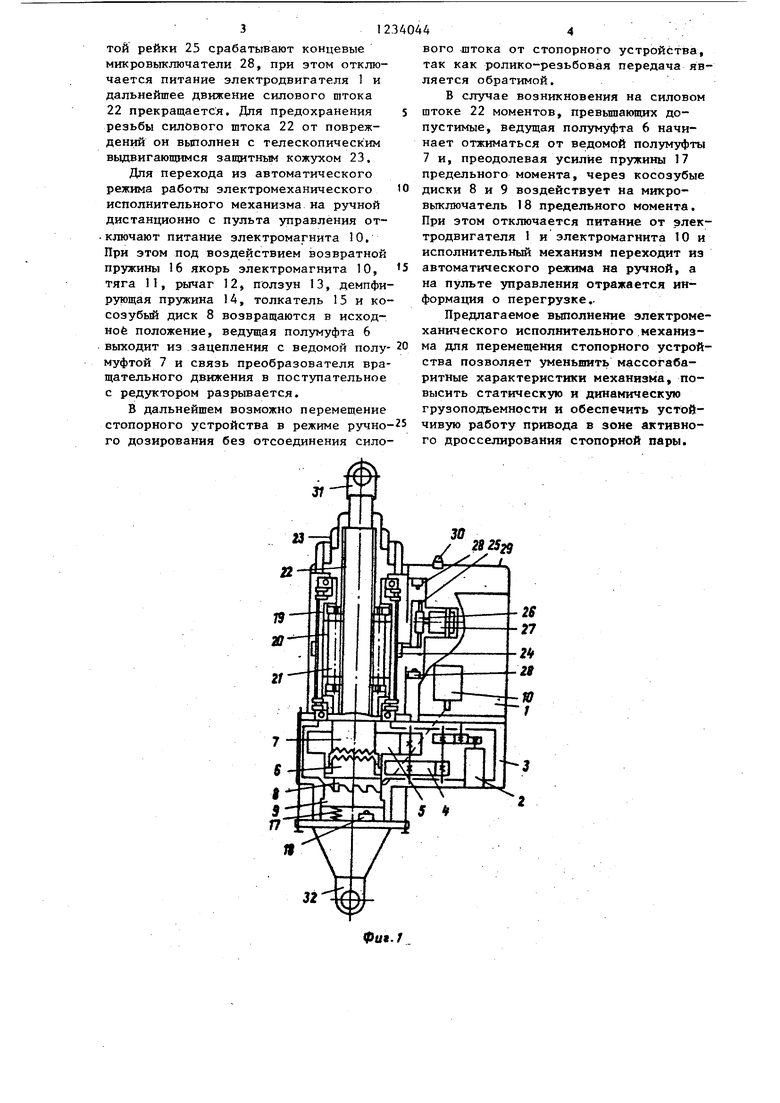
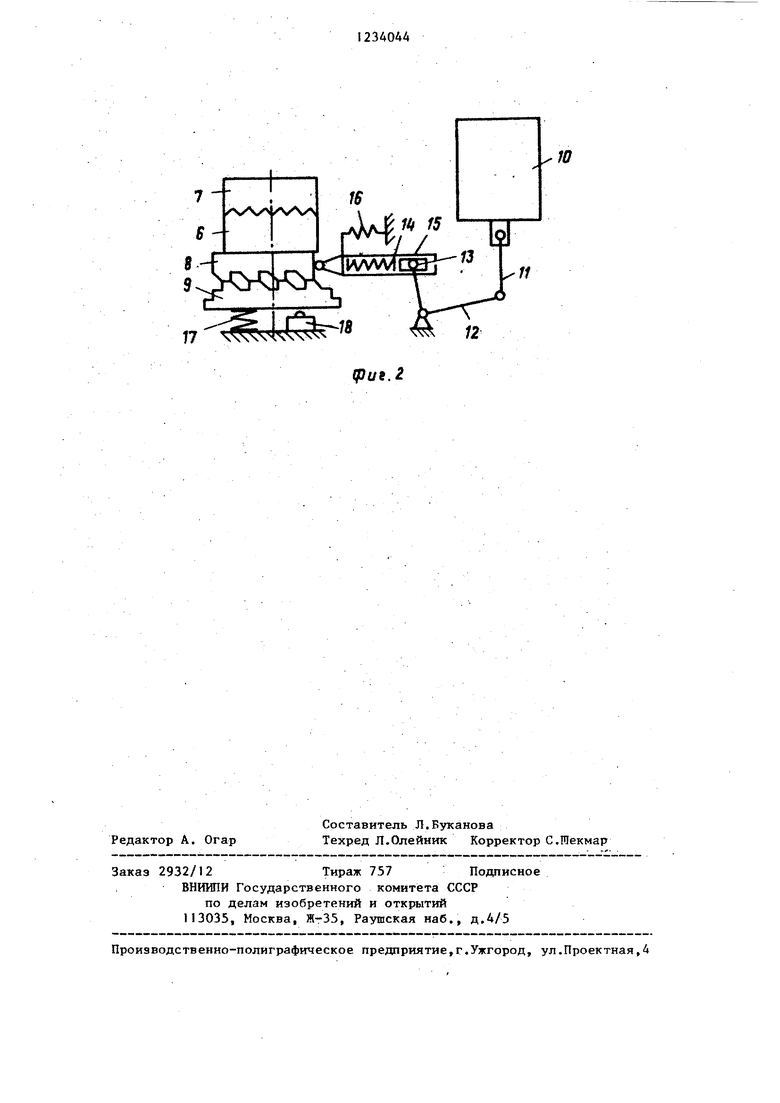
На фиг.1 изображен электромеханический исполнительный механизм; на фиг.2 кинематическая схема зубчатой предохранительной муфты сцепления.
Электромеханический исполнительный механизм содержит электродвигатель 1 и датчик 2 скорости электродвигателя, размещенные в корпусе 3 и соединенные через редуктор 4 с зубчатым колесом 5. Зубчатое колесо 5 подвижно соединено с предохранительной муфтой сцепления, выполненной в виде зубчатых полумуфт 6 и 7. Ведущая полумуфта 6 подвижно соединена с косозубыми дисками 8 и 9. Косозу- бьй диск 8 соединен с электромагнитом 10 посредством кинематической связи, содержащей тягу 1, рычаг 12, ползун 13, демпфирующую пружину I4 и толкатель 15, соединенный с возвратной пружиной 16. Косозубый диск 9 связан с пружиной 17 и микровыключа- телем 18 предельного момента электродвигателя 1. Ведомая полумуфта 7 жестко соединена с обоймой 19 обратимого преобразователя вращательного движения в поступательное, состоящего из ведущей гайки 20, связанной через резьбовые ролики 21 с силовым штоком 22, вьтолненным в виде винта с телескопическим защитным кожухом 23. Обойма 19 посредством разрезной гайки 24 через зубчатую рейку 25 и зубчатое колесо 26 соединена с датчиком 27 положения, расположенным в корпусе 3, и концевыми микровыключателями 28.
В корпусе 3, закрытом защитной крышкой 29, размещен также штуцер 30 для подвода воздуха.
Узел 31 верхнего крепления соединен с силов ым штоком 22, а узел 32 нижнего крепления - с корпусом 3.
Электромеханический исполнительный механизм работает следующим образом.
При подаче управляющего напряжения на электродвигатель 1 его вал вращается со скоростью и в направле
5
0
НИИ, определяемыми параметрами управляющего напряжения. Направление и скорость вращения измеряются датчиком 2 скорости электродвигателя, сигнал с которого подается в систему управления. Вал электродвигателя I через редуктор 4 приводит во вращение зубчатое колесо 5 и ведущую ползгмуф- ту 6.
При подаче напряжения на обмотку электромагнита 10 его якорь перемещает тягу 11 (фиг.2), при этом рьгчаг 12 перемещает ползун 13, который через демпфирующую пружину 14 и толкатель 15 передает усилие на косозубый диск 8. Косозубые диски 8 и 9 сдвигаются один относительно другого, при этом диск 8 перемешается вверх и вводит ведущую полумуфту 6 в зацепление с ведомой полумуфтой 7 и вращение передается на обойму 19 обратимого преобразователя вращательного движения в поступательное.
Преобразователь вращательного движения в поступательное выполнен в виде обратимой планетарной ролико- резьбовой передачи и работает сле- дущим образом/ Вращение от обоймы 19 через ведущую гайку 20 передается резьбовым роликам 21, которые об- катьшаются одновременно по резьбовым поверхностям ведутЦей гайки 20 и силового щтока 22. Резьбы ведущей гай- ки 20, резьбовых роликов 21 и сило5 вого щтока 22 имеют одинаковый щаг, а углы подъема резьб подобраны так, что ролики 21 при обкатывании не вывинчиваются из ведущей гайки 20 и силовой шток 22 совершает возвратноо поступательное движение.
При перемещении силового штока 22 обойма 19 резьбой, нарезанной на ее наружной поверхности, приводит в поступательное движение разрезную гай5 ку 24, которая перемещает зубчатую рейку 25 и зубчатое колесо 26 с валом датчика 27 положения. Таким образом, каждому положению силового штока 22 соответствует определенное
0 значение сигнала с датчика 27 положения, а его размещение в корпусе 3 позволяет за счет разворота статора изменять начальное положение силового штока 22, исключая тем самым при5 менение для этой цели дополнительных устройств.
При подходе силового штока 22 к крайним положениям с помощью зубчатой рейки 25 срабатывают концевые микровьпслючатели 28, при этом отключается питание электродвигателя 1 и дальнейшее движение силового штока 22 прекращается. Для предохранения резьбы силового штока 22 от повреждений он выполнен с телескопическим выдвигающимся защитньж кожухом 23,
Для перехода из автоматического режима работы электромеханического исполнительного механизма на ручной дистанционно с пульта управления от- ключают питание электромагнита 10, При этом под воздействием возвратной пружины 16 якорь электромагнита 10, тяга 11, рычаг 12, полэун 13, демпфирующая пружина 14, толкатель 15 и ко- созубый диск 8 возвращаются в исходное положение, ведущая полумуфта 6 выходит из зацепления с ведомой полу- муфтой 7 и связь преобразователя вращательного движения в поступательное с редуктором разрывается.
В дальнейшем возможно перемещение стопорного устройства в режиме ручного дозирования без отсоединения силового штока от стопорного устройства, так как ролико-резьбовая передача является обратимой,
В случае возникновения на силовом штоке 22 моментов, превьщ1ающих допустимые, ведущая полумуфта 6 начинает отжиматься от ведомой полумуфты 7 и, преодолевая усилие пружины 17 предельного момента, через косозубые диски 8 и 9 воздействует на микро- выключатель 18 предельного момента. При этом отключается питание от электродвигателя 1 и электромагнита 10 и исполнительный механизм переходит из автоматического режима на ручной, а на пульте управления отражается информация о перегрузке..
Предлагаемое выполнение электромеханического исполнительного механизма для перемещения стопорного устройства позволяет уменьшить массогаба- ритные характеристики механизма, повысить статическую и динамическзпо грузоподъемности и обеспечить устойчивую работу привода в зоне активного дросселирования стопорной пары.
31
23
Ч
282529 I
/%/4x pW
17
Iff 15
ul2LZ, rwwHom
Iff 15
Z,
Ы
n
Редактор A. Orap
Составитель Л.Буканова
Техред Л.Олейник Корректор С.Шекмар
Заказ 2932/12Тираж 757 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород, ул.Проектная,4
(pu8.2
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕДОХРАНИТЕЛЬНАЯ МУФТА СЦЕПЛЕНИЯ | 1991 |
|
RU2018736C1 |
| МУФТА | 2008 |
|
RU2357128C1 |
| Устройство для завинчивания крепежных деталей | 1981 |
|
SU1134357A1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| МУФТА | 2007 |
|
RU2357127C1 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| Предохранительная фрикционная муфта | 1986 |
|
SU1399543A1 |
| Фрикционная муфта | 1973 |
|
SU444903A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ЗАЧИСТКИ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2022672C1 |
| Патент США 4037893, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| 1979 |
|
SU846099A1 | |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
