2. Устройство управления ускоренным охлаждением полосы, содержащее измерители скорости толщины, температуры конца прокатки и температуры смотки полосы, первый и второй задатчики, блок коррекции, сумматор, входы которого соединены с измерителем температуры смотки полосы и первым задатчиком, а выход - с входом блока коррекции, блок деления, первый и второй блоки умножения и дуишрующее усройство, отличающееся тем, что, с целью повышения качества полосы за счет увеличения точности регулирования температуры смотки, в него дополнительно введены четыре задат- чика, датчик начала ускорения, блок слежения, компаратор, три сумматора, датчик наличия полосы, формирователь, два датчика скорости воздушного охлаждения, коммутатор, два датчика времени, датчик длины и распределитель, причем измеритель скорости соединен с входом блока слежения и с первым входом коммутатора, измеритель толщины - с первыми входами датчиков скорости воздушного охлаждения, измеритель температуры конца прокатки - с вторыми входами первого аатчика скорости возду цного охлаждения и второго сумматора, первый задатчик соединен с вторым входом второго датчика скорости воздупь ного охлаждения и первым входом второго сумматора, второй задатчик - с третьими входами датчиков скорости воздушного охлаждения, третий задатчик - с первым входом компаратора, четвертый задатчик - с первым входом третьего сумматора, пятый задатчик - с первыми входами второго датчика времени и датчика длины, шестой
Изобретение относится к прокатному производству и может быть использовано в системах регулирования температуры смотки полосы на станах горячей прокатки.
Цель изобретения - повышение качества полосы за счет увеличения точности регулирования температуры смотки.
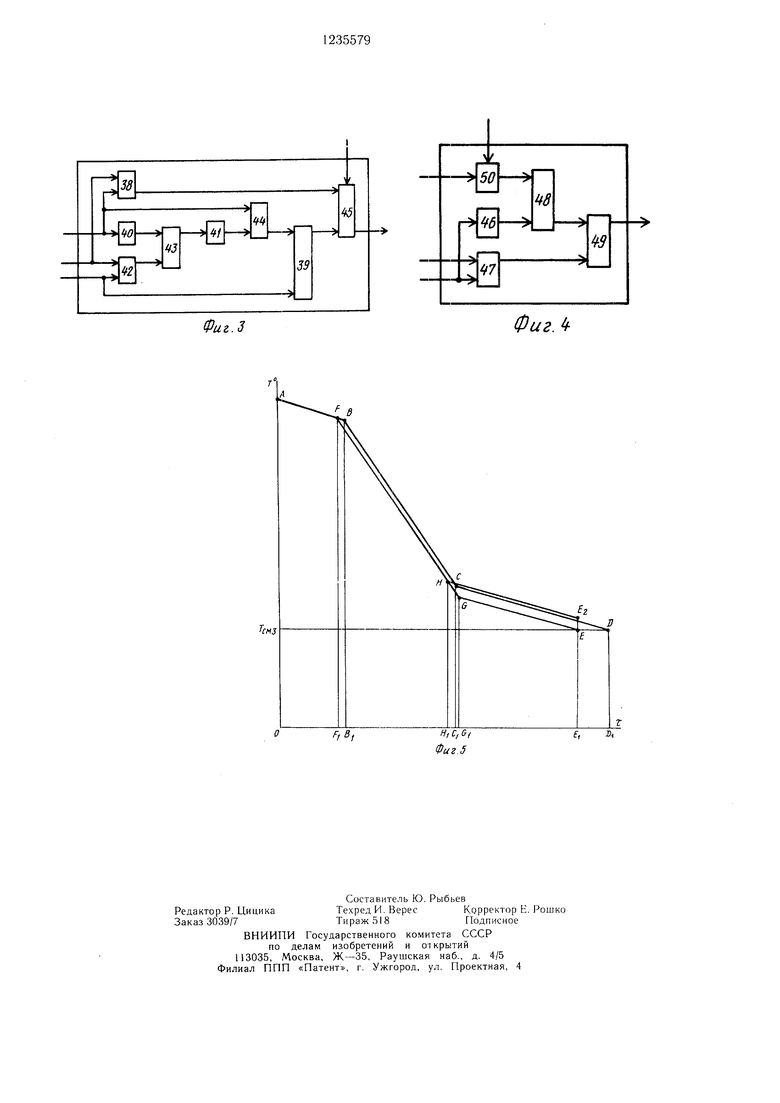
На фиг. 1 представлена блок-схе.ма устройства, реализующего предлагаемый способ; на фиг. 2 - блок-схема датчика скорости воздушного охлаждения; на фиг. 3 блок-схема датчика времени; на фиг. 4 --- блок-схема датчика длины; на фиг. 5 --- кривые процеесов охлаждения полосы на отводящем рольганге.
Устройство управления ускоренным охлаждением полосы (фиг. I) содержит из- меритель 1 скорости полосы, измеритель 2 толщины полосы, измерители 3 и 4 темпезадатчик с первым входом четвертого сумматора, датчик начала ускорения - с четвертыми входами второг О датчика времени и датчика длины, датчик наличия полосы - с первым входом первого датчика времени, выход блока слежения соединен с вторыми входами компаратора и третьего сумматора, выход которого соединен с вторым входом коммутато)а. вход формирователя соединен с выходом компаратора, а выход с вторым входом первого
датчика времени и с управляющим входом коммутатора, первый выход которого соединен с вторыми входами второго датчика времени, и датчика длины, а второй выход - с третьим входом второго датчика времени, выход которого соединен с первым входом первого блока умножения, выход первого датчика времени соединен с первым вхо.аом второго блока уупюжения, второй вход которог о соединен с выходом первого датчика скорости воздушного охлаждения, а выход - с третьим входом второго сумматора, четвертый вход которого соединен с выходом первого блока уменожения. выход второго датчика скорости воздушного ох;1аждения соединен с вторыми входами первого блока умножения и четвертого сумматсфа, первый и второй входы блока деления соединены с выходами второго I четверто1 о сумматоров, а пыход -- с третьим входом датчика д.лины, выход которого соединен с вторьгм входом блока коррекции, вход распределителя - с выходом блока коррекции, а В1.1ход --- с душирукмцей установкой.
ратурь конца прокатки и смотки, задатчики 5---10, датчик 11 начала ускорения, блок 12 слежения, компаратор 13, сумматоры 14-17, датчик 18 наличия, формирователь 19, датчики 20 и 21 скорости во.здушного охлаждепия, коммутатор 22, датчики 23 и 24 времени, блоки 25 и 26 умнон екня, блок 27 деления, датчик 28 длины, блок 29 коррекции, распределитель 30, дуц1ируюшее устройство 31. На фигуре показаны также последняя чистовая клеть 32, с рабочи.м валком, с которым соединен измерите,:|ь 1 скорости полосы, и моталка 33 для смотки полосы 34.
Измеритель 1 скорости сосдине с вхо.а.ом блока
слежения и с первым входом
ком.мутатора 22, измеритель 2 толщины с первыми входами датчиков 20 и 21 скорости во.здушного охлаждения (ВО), .измеритель 3 температуры конца прокатки - с вторыми входами датчика 20 и сумматора 15, задатчик 9 соединен с вторым входом датчика 21 скорости ВО и первыми входами сумматоров 15 и 17, второй вход и выход которого соединены с измерителем 4 температуры смотки и первым входом блока 29 коррекции соответственно, задатчик 8 - с третьими входами датчиков 20 и 21 скорости ВО, задатчик 5 - с первым входом компаратора 13, задатчик 6 - с первым входом сумматора 14, задатчик 7 - с первыми входами датчиков 24 и 28, задатчик 10 - с первым входом сумматора 16, датчик 11 начала ускорения - с четвертыми входами датчиков 24 и 28, датчик 18 наличия - с первым входом датчика 23 времени, выход блока 12 слежения соединен с вторыми входами компаратора 13 и сумматора 14, выход которого соединен с вторым входом коммутатора 22, вход формирователя 19 соединен с выходом компаратора 13, а выход - с вторым входом датчика 23 времени и с управляющим входом коммутатора 22, первый выход которого соединен с вторыми входами датчиков 24 и 28, а второй вход - с третьим входом датчика 24, выход которого соединен с первым входом блока 26 умножения, выход датчика 23 соединен с первым входом блока 25 умножения, второй вход которого соединен с выходом датчика 20 скорости ВО, а выход-с третьим входом сумматора 15, четвертый вход которого соединен с выходом блока 26 умножения, выход датчика 21 скорости ВО соединен с вторыми входами блока 26 умножения и сумматора 16, первый и второй входы блока 27 деления соединены с выходами сумматоров 15 и 16, а выход - с третьим входом датчика 28 длины, выход которого соединен с вторым входом блока 29 коррекции, вход распределителя 30 соединен с выходом блока 29 коррекции, а выход - с душирующей установкой 31.
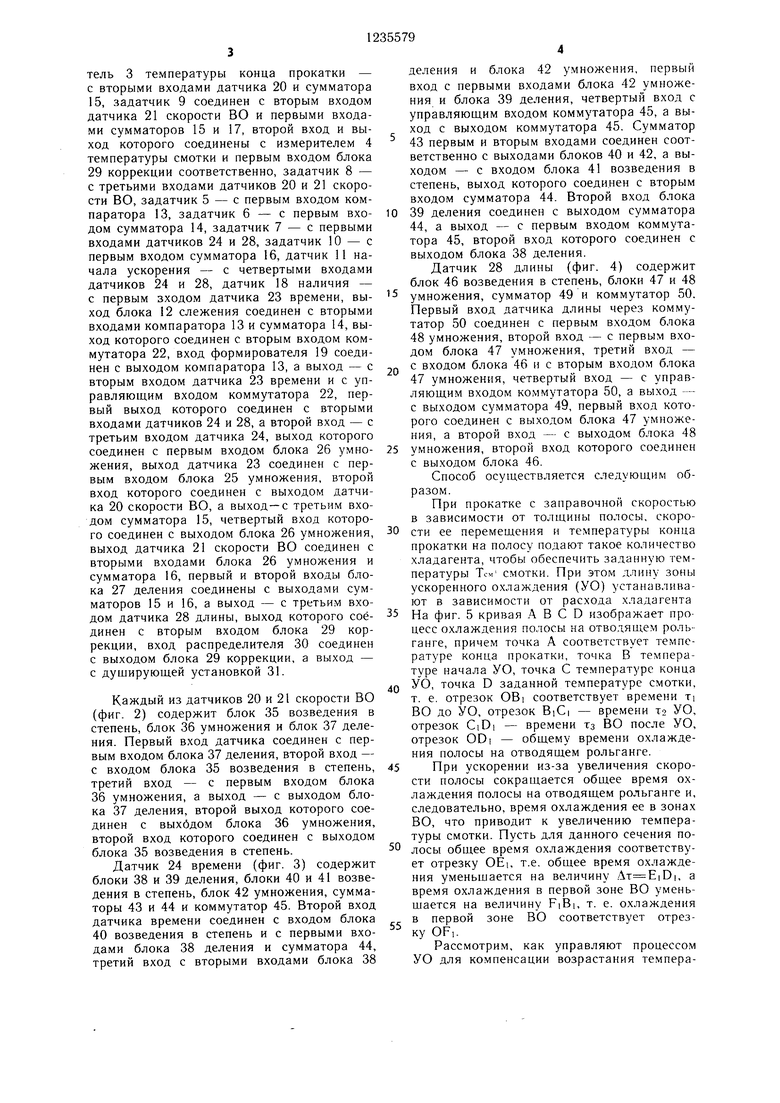
Каждый из датчиков 20 и 21 скорости ВО (фиг. 2) содержит блок 35 возведения в степень, блок 36 умножения и блок 37 деления. Первый вход датчика соединен с первым входом блока 37 деления, второй вход - с входом блока 35 возведения в степень, третий вход - с первым входом блока 36 умножения, а выход - с выходом блока 37 деления, второй выход которого соединен с выхбдом блока 36 умножения, второй вход которого соединен с выходом блока 35 возведения в степень.
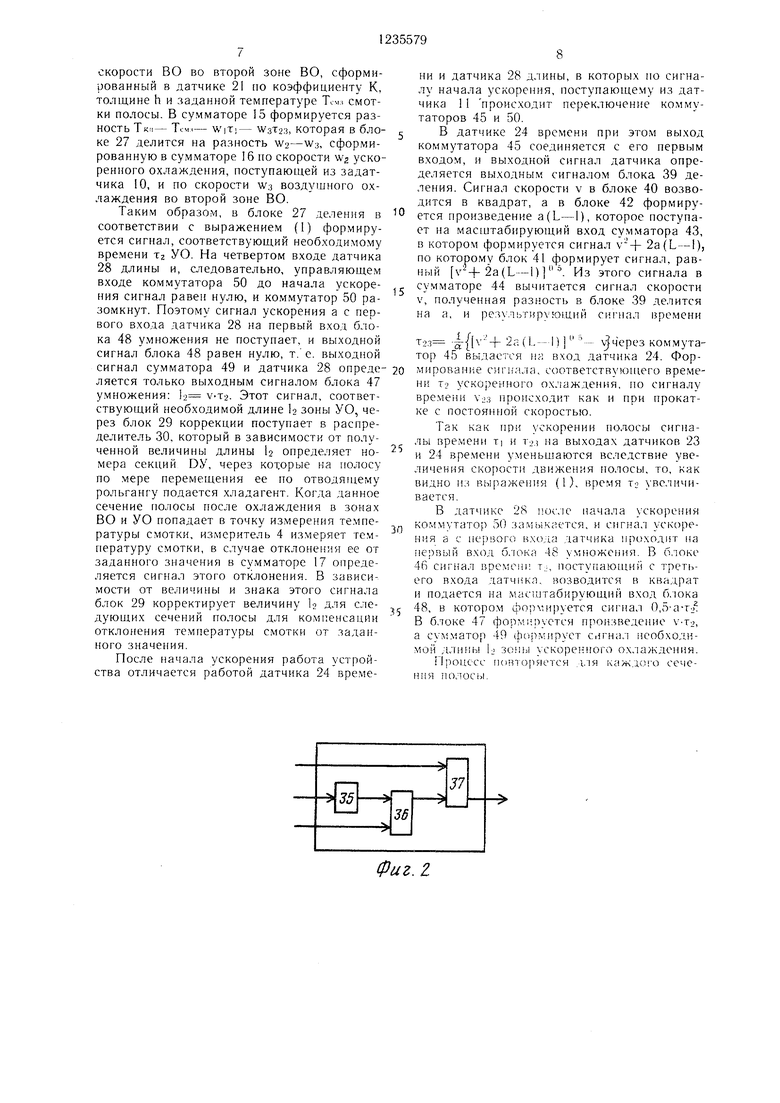
Датчик 24 времени (фиг. 3) содержит блоки 38 и 39 деления, блоки 40 и 41 возведения в степень, блок 42 умножения, сумматоры 43 и 44 и коммутатор 45. Второй вход датчика времени соединен с входом блока 40 возведения в степень и с первыми входами блока 38 деления и сумматора 44, третий вход с вторыми входами блока 38
деления и блока 42 умножения, первый вход с первыми входами блока 42 умножения и блока 39 деления, четвертый вход с управляющим входом коммутатора 45, а выход с выходом коммутатора 45. Сумматор 43 первым и вторым входами соединен соответственно с выходами блоков 40 и 42, а выходом - с входом блока 41 возведения в степень, выход которого соединен с вторым входом сумматора 44. Второй вход блока
0 39 деления соединен с выходом сумматора 44, а выход - с первым входом коммутатора 45, второй вход которого соединен с выходом блока 38 деления.
Датчик 28 длины (фиг. 4) содержит блок 46 возведения в степень, блоки 47 и 48
5 умножения, сумматор 49 и коммутатор 50. Первый вход датчика длины через коммутатор 50 соединен с первым входом блока 48 умножения, второй вход - с первым входом блока 47 умножения, третий вход -
д с входом блока 46 и с вторым входом блока 47 умножения, четвертый вход - с управляющим входом коммутатора 50, а выход - с выходом сумматора 49, первый вход которого соединен с выходом блока 47 умножения, а второй вход - с выходом блока 48
5 умножения, второй вход которого соединен с выходом блока 46.
Способ осуществляется следующим образом.
При прокатке с заправочной скоростью в зависимости от толщины полосы, скоро0 сти ее перемещения и температуры конца прокатки на полосу подают такое количество хладагента, чтобы обеспечить заданную температуры Тем смотки. При этом длину зоны ускоренного охлаждения (УО) устанавливают в зависимости от расхода хладагента
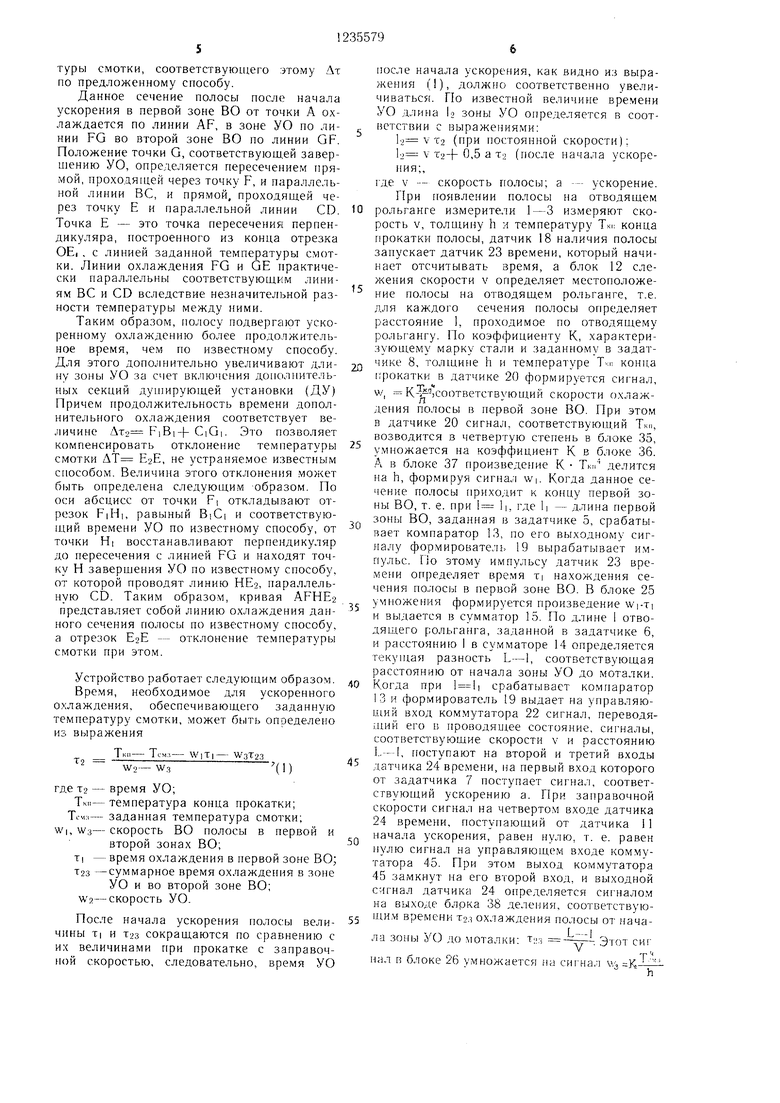
5 На фиг. 5 кривая А В С D изображает процесс охлаждения полосы на отводящем рольганге, причем точка А соответствует температуре конца прокатки, точка В температуре начала УО, точка С температуре конца
0 УО, точка D заданной температуре смотки, т. е. отрезок OB| соответствует времени TI ВО до У О, отрезок BiCi - времени то УО, отрезок CiDi - времени тз ВО после У О, отрезок ODi - общему времени охлаждения полосы на отводящем рольганге.
5 При ускорении из-за увеличения скорости полосы сокращается общее время охлаждения полосы на отводящем рольганге и, следовательно, время охлаждения ее в зонах ВО, что приводит к увеличению температуры смотки. Пусть для данного сечения по0 лосы общее время охлаждения соответствует отрезку OEi, т.е. общее время охлаждения уменьщается на величину ., а время охлаждения в первой зоне ВО уменьшается на величину FiBi, т. е. охлаждения в первой зоне ВО соответствует отрезку OF,.
Рассмотрим, как управляют процессом УО для компенсации возрастания темпера5
Т2
W2- Ws
(1)
туры смотки, соответствующего этому Дт по предложенному способу.
Данное сечение полосы после начала ускорения в первой зоне ВО от точки А охлаждается по линии AF, в зоне УО по ли- НИИ FG во второй зоне ВО по линии GF. Положение точки G, соответству1ош.ей завершению УО, определяется пересечением прямой, проходяп1ей через точку F, и параллельной линии ВС, и прямой, проходящей через точку Е и параллельной линии CD. Точка Е - это точка пересечения перпендикуляра, построенного из конца отрезка OEi , с линией заданной температуры смотки. Линии охлаждения FG и GE практически параллельны соответствующим линиям ВС и CD вследствие незначительной разности температуры между ними.
Таким образом, полосу подвергают ускоренному охлаждению более продолжительное время, чем по известному способу. Для этого дополнительно увеличивают дли- ну зоны УО за счет включения дополнительных секций дупшрующей установки (ДУ) Причем продолжительность времени дополнительного охлаждения соответствует величине Дт2 FiBi- - CiG|. Это позволяет компенсировать отклонение температуры смотки ДТ Е2Е, не устраняемое известным способом. Величина этого отклонения может быть определена следующим образом. По оси абсцисс от точки FI откладывают отрезок Fini, равыный BiCi и соответствующий времени УО по известному способу, от точки HI восстанавливают перпендикуляр до пересечения с линией FG и находят точку Н завершения УО по известному способу, от которой проводят линию НЕ2, параллельную СО. Таким образом, кривая AFHE2 представляет собой линию охлаждения дан- ного сечения полосы по известному способу, а отрезок Е2Е - отклонение температуры смотки при этом.
Устройство работает следующим образом, Время, необходимое для ускоренного о.хлаждения, обеспечивающего заданную температуру смотки, может быть определено из выражения
ТкиТсмз- W|T|W3T23
где Т2 - время УО;
Ткп- температура конца прокатки; TcM.i- заданная температура смотки; А 1, W3- скорость ВО полосы в первой и
второй зонах ВО;
Т| - время охлаждения в первой зоне ВО; Т23 -суммарное время охлаждения в зоне
УО и во второй зоне ВО; W2-скорость УО.
После начала ускорения полосы вели- чины Т| и Т23 сокращаются по сравнению с их величинами при прокатке с заправочной скоростью, следовательно, время УО
5
,. O
0 5 0
o
5
5
после начала ускорения, как видно из выражения (1), должно соответственно увеличиваться. По известпой величине времени УО длина U зоны УО определяется в соот- етствии с выражениями:
1.2 V 12 (при постоянной скорости); 12 V Т2+ 0,5 а Т2 (после начала ускорения;,
где V - скорость полосы; а -- ускорение. При появлении полосы на отводящем рольганге измерители 1-3 измеряют скорость V, толщину h и температуру Ткп конца прокатки полосы, датчик 18 наличия полосы запускает датчик 23 времени, который начинает отсчитывать время, а блок 12 слежения скорости V определяет местоположение полосы на отводящем рольганге, т.е. для каждого сечения полосы определяет расстояние 1, проходимое по отводящему рольг ангу. По коэффициенту К, характеризующему марку стали и заданному в задат- чике 8, толщине h и температуре Тки конца прокатки в датчике 20 формируется сигнал, W, --К1 -1Соответствуюп.1ий скорости охлаждения полосы в первой зоне ВО. При этом в датчике 20 сигнал, соответствующий Ткп, возводится в четвертую степень в блоке 35, умножается на коэффициент К в блоке 36. А в блоке 37 произведение К TKPI делится на h, формируя сигнал W|. Когда данное сечение полосы приходит к концу первой зоны ВО, т. е. при 1 1|, где 1| - длина первой зонь ВО, заданная в задатчике 5, срабатывает компаратор 13, по его выходному сигналу формирователь 19 вырабатывает импульс. По этому импульсу датчик 23 времени определяет время Т| нахождения сечения полосы в первой зоне ВО. В блоке 25 умножения формируется произведение WI-TI и выдается в сумматор 15. По длине I отводящего рольганга, заданной в задатчике 6, и расстоянию I в сумматоре 14 определяется текущая разность L-, соответствующая расстоянию от начала зоны УО до моталки. Когда при срабатывает компаратор 13 и формирователь 19 выдает на управляющий вход коммутатора 22 сигнал, переводящий его в проводящее состояние, сигналы, соответствувэшие скорости v и расстоянию I..-- I, поступают на второй и третий входы датчика 24 времени, на первый вход которого от задатчика 7 поступает сигнал, соответствующий ускорению а. При заправочной скорости сигнал на четвертом входе датчика 24 времени, поступающий от датчика 11 начала ускорения, равен нулю, т. е. равен нулю сигнал на управляющем входе коммутатора 45. При этом выход коммутатора 45 замкнут па его второй вход, и выходной сигнал датчика 24 определяется сиг нало.м на выходе блрка 38 деления, соответствую- олим времени Т2з охлаждения полосы от начала зопы УО до моталки: т;.з ---pi Этот сигнал п блоке 26 умножается на сигнал и;
скорости во во второй зоне ВО, сформированный в датчике 21 Ю коэффициенту К, толщине h и заданной температуре То.:, смотки nOvTocbi. В сумматоре 15 формируется разность Ткп- Тон- wiTi- W3T2:i, которая в блоке 27 делится на разность W2-ws, сформированную в сумматоре 16 по скорости w ускоренного охлаждения, поступающей из задат- чика 10, и по скорости W;; воздушного охлаждения во второй зоне ВО.
Таким образом, в блоке 27 деления в соответствии с выражением (1) формируется сигнал, соответствующий необходимому времени тг УО. На четвертом входе датчика 28 длины и, следовательно, управляющем входе коммутатора 50 до начала ускорения сигнал равен нулю, и коммутатор 50 разомкнут. Поэтому сигнал ускорения а с первого входа датчика 28 а первый вход блока 48 умножения не поступает, и выходной сигнал блока 48 равен нулю, т. е. выходной сигнал сумматора 49 и датчика 28 определяется только выходным сигналом блока 47 умножения: 12 V-TJ. Этот сигнал, соответствующий необходимой длине Ь зоны УО, через блок 29 коррекции поступает в распределитель 30, который в зависимости от полученной величины длины Ь определяет номера секций ОУ, через которые на полосу по мере перемещения ее по отводящему рольгапгу подается хладагент. Когда данное сечение полосы после охлаждения в зонах ВО и УО попадает в точку измерения температуры смотки, измеритель 4 измеряет температуру смотки, в случае отклонении ее от заданного значения в сумматоре 17 определяется сигнал этого отклонения. В зависимости от величины и знака этого сигнала блок 29 корректирует величину Ь для следующих сечений полосы для ко.миенсации отклонения температурЕЛ смотки от заданного значения.
После начала ускорения работа устройства отличается работой датчика 24 времени и датчика 28 длины, в которых по сигналу начала ускорения, поступающему из датчика 11 происходит переключение коммутаторов 45 и 50.
В датчике 24 времени при этом выход коммутатора 45 соединяется с его первым входом, и выходной сигнал датчика определяется выходным сигналом блока 39 деления. Сигнал скорости v в блоке 40 возводится в квадрат, а в блоке 42 формируется произведение a(L-I), которое поступает на масютабирующий вход сумматора 43, в котором формируется сигнал v -|- 2a{L-1), по которому блок 41 формирует сигнал, равный v -+-2a() °. Из этого сигнала в сумматоре 44 вычитается сигнал скорости V, полученная разность в блоке 39 делится на а, и резулыирующий сш нал времени
0
5
0
5
Т2з { + 2a(L-- I) - vJ4 epe3 коммутатор 45 выдается на вход датчика 24. Формирование сигь ала, соответствующего вре.ме- ни Т9 уско;)еиного охлаждения, по сигналу времени 2з происходит как и при прокатке с постоянной скоростью.
Так как при ускорении полосы сигналы времени Т| и Г2л на выходах датчиков 23 и 24 времени уменьщаются вследствие увеличения скорости движения полосы, то, как видно из выражения (1), время Т2 увеличивается.
В датч1 кс 28 после начала ускорения коммутатор 50 замыкается, и сигнал ускорения а с первого входа датчика проходит на первый вход блока 48 умножения. В блоке 46 сигь ал времени т.;, поступающи)) с третьего входа датч1-:кл. возводится в квадрат и подается на .масштабирующий вход б.юка 48, в котором формируется сигнал 0,5-ат2 В блоке 47 форм;;руется произведение v-T2, а сумматор 49 формирует с.гнал необходимой длины |о зояы ускоренного охлаждения.
Процесс иопторяется ,1. 1я iva/n.ioro сечения полосы.
.Z
ив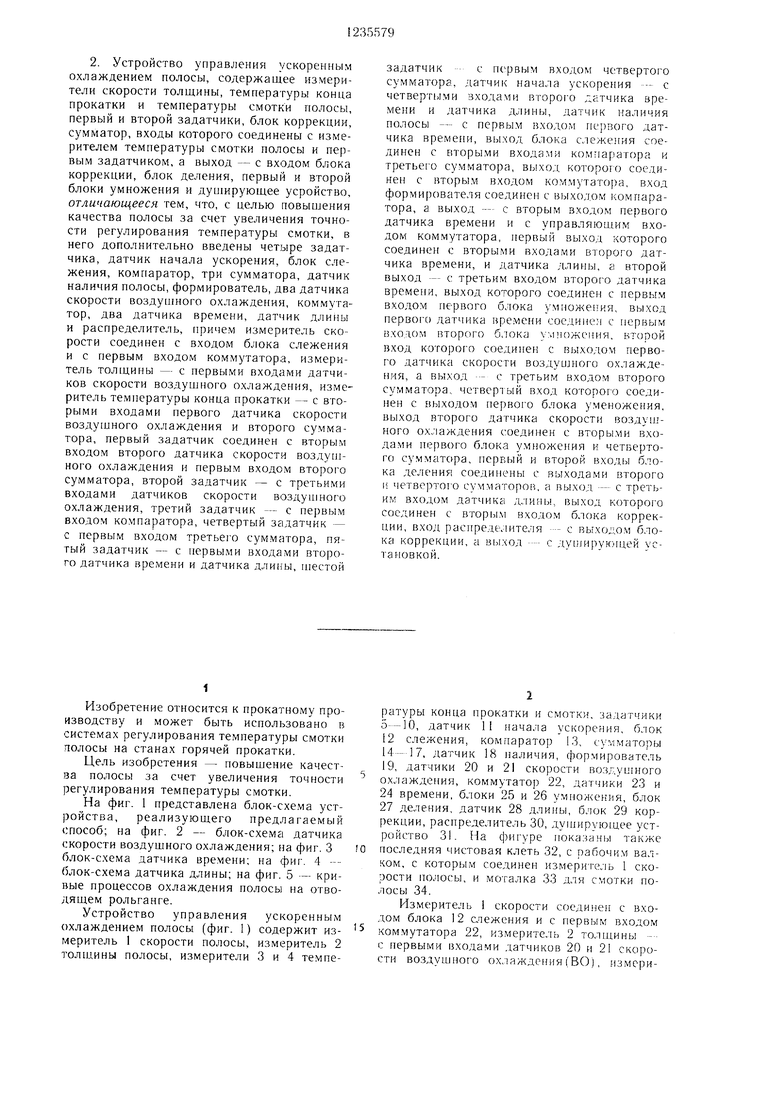
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления ускоренным охлаждением полосы и устройство для его осуществления | 1984 |
|
SU1192872A1 |
| Способ управления ускоренным охлаждением проката и устройство для его осуществления | 1985 |
|
SU1297960A1 |
| Способ управления ускоренным охлаждением проката и устройство для его осуществления | 1988 |
|
SU1547901A1 |
| Устройство управления ускоренным охлаждением проката | 1987 |
|
SU1507483A1 |
| Устройство для автоматического управления ускоренным охлаждением проката | 1983 |
|
SU1161205A1 |
| Система регулирования температуры смотки горячекатаной полосы | 1978 |
|
SU735352A1 |
| Устройство управления температурой смотки горячекатаной полосы | 1985 |
|
SU1308414A1 |
| Система регулирования температуры полосы на выходе стана горячей прокатки | 1981 |
|
SU971543A1 |
| Регулятор температуры полосы на выходе стана горячей прокатки | 1976 |
|
SU656682A1 |
| Устройство для автоматического регулирования охлаждения полосы в чистовой группе стана горячей прокатки | 1983 |
|
SU1158268A1 |
1. Способ управления ускоренным охлаждением полосы, включающий изменение расхода хладагента путем изменения длины зоны ускоренного охлаждения в зависимости от величины скорости, температуры и толщины полосы для обеспечения заданной температуры смотки, определение необходимого времени ускоренного охлаждения и последующее увеличение длины зоны ускоренного охаждения после начала ускорения полосы, отличающийся тем, что, с целью повыщения качества полосы за счет увеличения точности регулирования температуры смотки, после начала ускорения полосы увеличивают время ускоренного охлаждения ее путем сокращения времени воздун - ного охлаждения и дополнительного увеличения длины зоны ускоренного охлаждения полосы. Ш Ш Ш X to оо сд сд со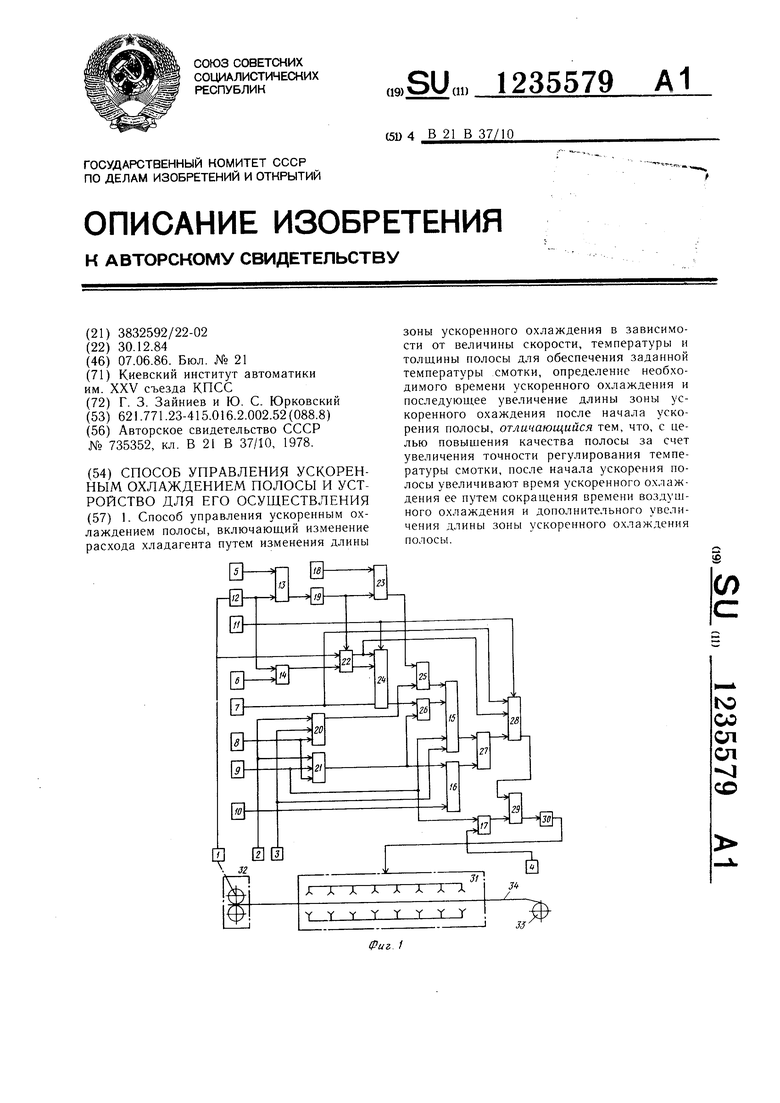
Фиг.З
ФигЛ
| Система регулирования температуры смотки горячекатаной полосы | 1978 |
|
SU735352A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
