2.Способ по п. 1, о т л и ч а ю - щ и и с я тем, что смещение направляющей осуществляют путем поворотов ее вокруг одной из вертикальных осей, проходящих через указанную направля- юшую,
3.Способ по п, 1, о т л и ч а ю - щ и и с я тем, что смещение направляющей осуществляют поочередно вокруг одной из двух осей, проходяших через указанную направляющую, на равt
Изобретение относится к испытател ной технике и может быть использован при ресурсных испытаниях тракторов на полигоне.
Цель изобретения - повышение долговечности полигона путем снижения неравномерности износа его рабочей поверхности.
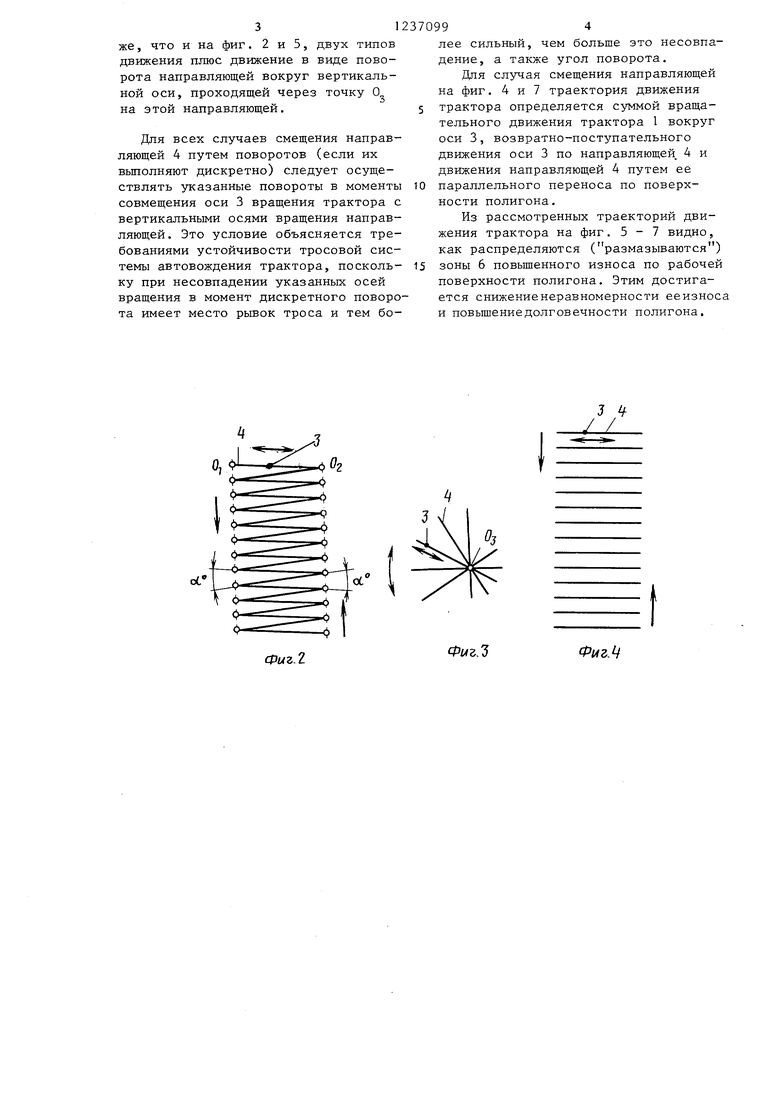
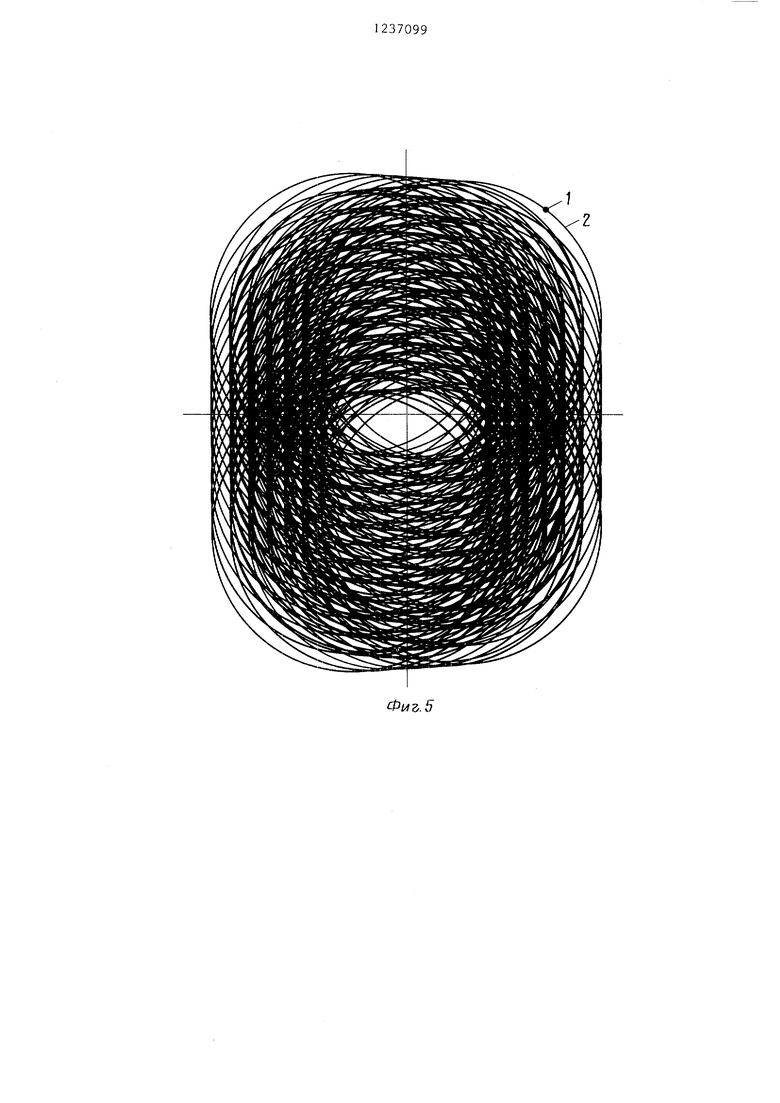
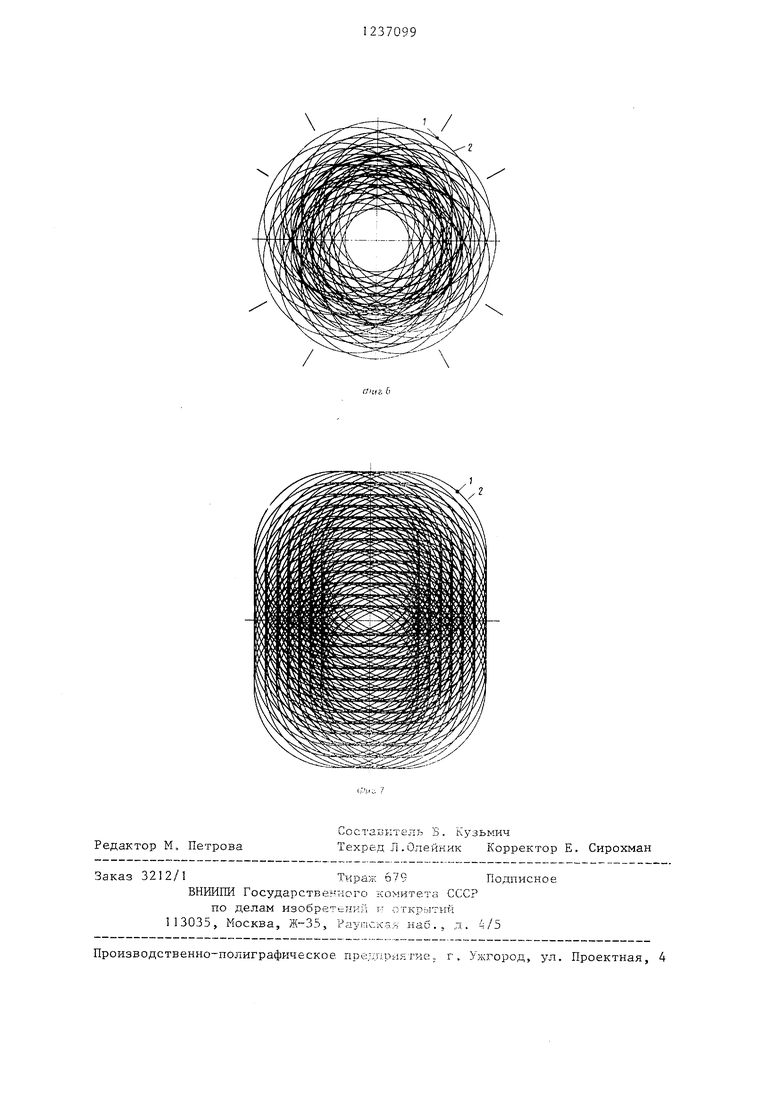
На фиг. 1 изображена схемгц поясняющая общий случай способа испытаний трактора на полигоне при автоматическом режиме вождения -- при сме- атении прямолинейной направляющей, длина которой меньше радиуса вращения трактора, по произвольному закону; на фиг. 2 - схема смещения направляющей путем поочередных поворотов ее на равные углы в противоположных направлениях вокруг одной из двух вертикальных осей, проходяших через указанную направляющую; на фиг. 3 - то же, путем поворота ее вокруг вертикальной оси, проходящей через указанную направляющую; на фиг. 4 - то же, путем параллельного перекоса; на фиг. 5 - 7 - траектории движения трактора, соответствующие схемам смещения направляющей на фиг. 2-4.
В процессе испытаний трактор 1 движется по траектории 2, совершая обороты вокруг оси 3 вращения. При этом ось 3 перемешают возвратно-поступательно по прямолинейной направляющей 4, длинаL которой меньше радиуса R (длины троса 5) вращения: трактора 1 вокруг оси 3, что устраняет переезды т;;рактора через направные, углы в противоположных направлениях .
А. (пособ по п. 3 отличаю- №. И И С Я теш, что пов(зрот направляющей осуществляют в момент совмещения поворотной оси трактора с вертикальной осью вращения указанной направляющей.,
5. Способ по п. 1, о т л и ч а ю - щ и и с к тем, что смешение направляющей осуществляют путем параллельного переноса.
ляющую 4, дает возможность поднять ее над, поверхностью полигона и выполнить мобильной.
Одновременно направляющук- 4 непрерывно или дискретно перемещают по поверхности полигона. В рез льтате траектория движения . ракторг. определяется вpall aтe.пьнor o движения трактора 1 вокруг оси 3, возврат- но поступательпого движения оси 3 по направляющей 4 и .цвгшения направляющей 4 по поверхности полигона по заданному закону. При ПТО.М точки пересечения траектории движения трактора,
обризу ощие зоны 6 повышенного износа рабочей поверхности поотигона, смешаются по этой поверхности вместе со смещением направляюще.й 4, что способствует равномерной выработке полигона, снижает неравномерность износа, повышая тем самым его (полигона) долговечность.
Для с.|7учая смещения направляющей на фиг. 2 и 5 траектория дв гления трактора 1 определяется зра- гцательв ог о движения трактора 1 вокруг оси 3, «озвратно-ггоступательного д:ь;-кения оси 3 но направляющей 4 и /з.зижения в виде поочередных повоэоT o i направляющей 4 вокруз одной из двух вертикальных осей, проходяк их черйз точки 0 и 0. Указан.ные по- очерсдные повороты направляющей мо- т уг осуществляться на разные углы
Б противоположных направлениях.
Для случая смещения направляющей на фиг. 3 и 6 траектория движеьгия трактора 1 определяется суммой тех
31
же, что и на фиг. 2 и 5, двух типов движения плюс движение в виде поворота направляющей вокруг вертикальной оси, проходящей через точку О на этой направляющей.
Для всех случаев смещения направляющей 4 путем поворотов (если их вьшолняют дискретно) следует осуществлять указанные повороты в моменты совмещения оси 3 вращения трактора с вертикальными осями вращения направляющей. Это условие объясняется требованиями устойчивости тросовой системы автовождения трактора, поскольку при несовпадении указанных осей вращения в момент дискретного поворота имеет место рывок троса и тем бо370994
лее сильный, чем больше это несовпадение, а также угол поворота.
Для случая смещения направляющей на фиг. 4 и 7 траектория движения 5 трактора определяется суммой вращательного движения трактора 1 вокруг оси 3, возвратно-постзшательного движения оси 3 по направляющей. 4 и движения направляющей 4 путем ее 10 параллельного переноса по поверхности полигона.
Из рассмотренных траекторий движения трактора на фиг. 5-7 видно, как распределяются (размазываются) 15 зоны 6 повышенного износа по рабочей поверхности полигона. Этим достигается снижениенеравномерности ееизноса и повышениедолговечности полигона.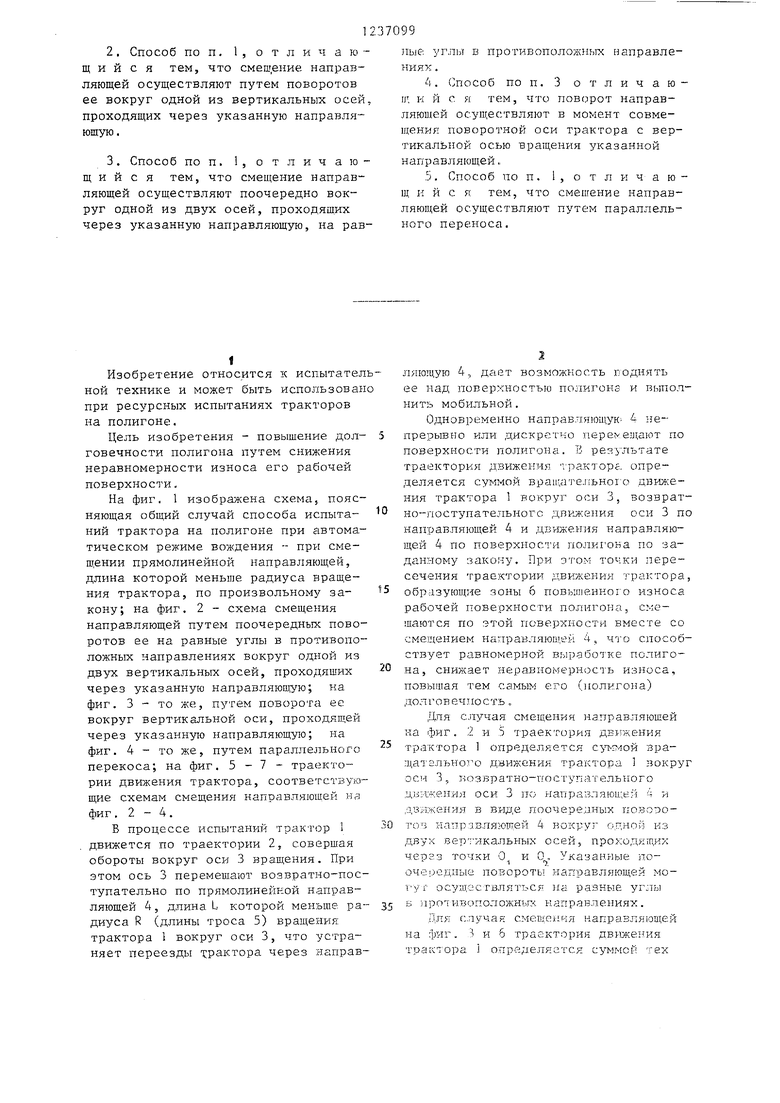
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ресурсных испытаний тракторов на полигоне | 1987 |
|
SU1422060A1 |
| Устройство для ресурсных испытаний тракторов по кольцевой дорожке | 1985 |
|
SU1303876A1 |
| Устройство для ресурсных испытаний тракторов на полигоне | 1987 |
|
SU1444637A1 |
| Устройство для ресурсных испытаний тракторов на полигоне | 1984 |
|
SU1219950A1 |
| Способ испытаний трактора на полигоне | 1981 |
|
SU1052178A1 |
| Устройство для автоматического направления движения трактора | 1991 |
|
SU1766291A1 |
| Устройство для ресурсных испытаний тракторов на полигоне | 1980 |
|
SU875238A1 |
| УСТРОЙСТВО ДЛЯ ОТРЕЗАНИЯ И ПОГРУЗКИ СИЛОСА И СЕНАЖА | 2000 |
|
RU2174300C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПРИ ПОЛИГОННЫХ ИСПЫТАНИЯХ | 1971 |
|
SU312558A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1980 |
|
SU934294A1 |

J
У /
Фиг.2
Фиг. 5
ФмгМ
Фиг. 5
Редактор М, Петрова
Состазятель Б. Кузьмич
Техред Л.Олейник Корректор Е. Сирохман
Заказ 3212/1Тираж 679 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобрететгкй т откро1тий 113035, Москва, Ж-35, Раушская наб. , ,л. ч/5
Производственно-полиграфическое пре;;;,т;. гие. г, Ужгород, ул. Проектная, 4
| Способ испытаний трактора на полигоне | 1981 |
|
SU1052178A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
