Известны устройства для автоматического вождения трактора при полигонных испытаниях, содержащие трос, обхватывающий шкив на рулевой колонке трактора, движущегося по треку.
Однако известные устройства обладают следующими недостатками.
Условия работы колесных тракторов при круговых полигонных испытаниях значительно отличаются от реальных производственных, так как многие пропащные тракторы, предназначенные в основном для посева и междурядной обработки сельскохозяйственных культур, при своей эксплуатации совершают преимущественно движение «челноком, т. е. по траектории, близкой по характеру к «восьмерке, а не к круговой.
Круговые полигонные испытания обуславливают нехарактерные-для производственных условий работы поломки и неисправности оСновных узлов и механизмов «односторонний износ дифференциала силовой передачи трактора, неравномерный износ шин. Рулевое управление трактора не испытывает характерной для производственных условий работы циклич1 юсти загрузки.
пружиненным рычагам, расположенным по бокам трактора п несущим катки, перемещающиеся по ограждению трека. Для сохранения постоянства радиуса кривизны на всех участках разворота на тракторе на одной из его сторон установлен дополнительный рычаг с катком, копирующим наружную дугу ограждения трека. Для защиты от аварий трос связан с акселератором подачи топлива.
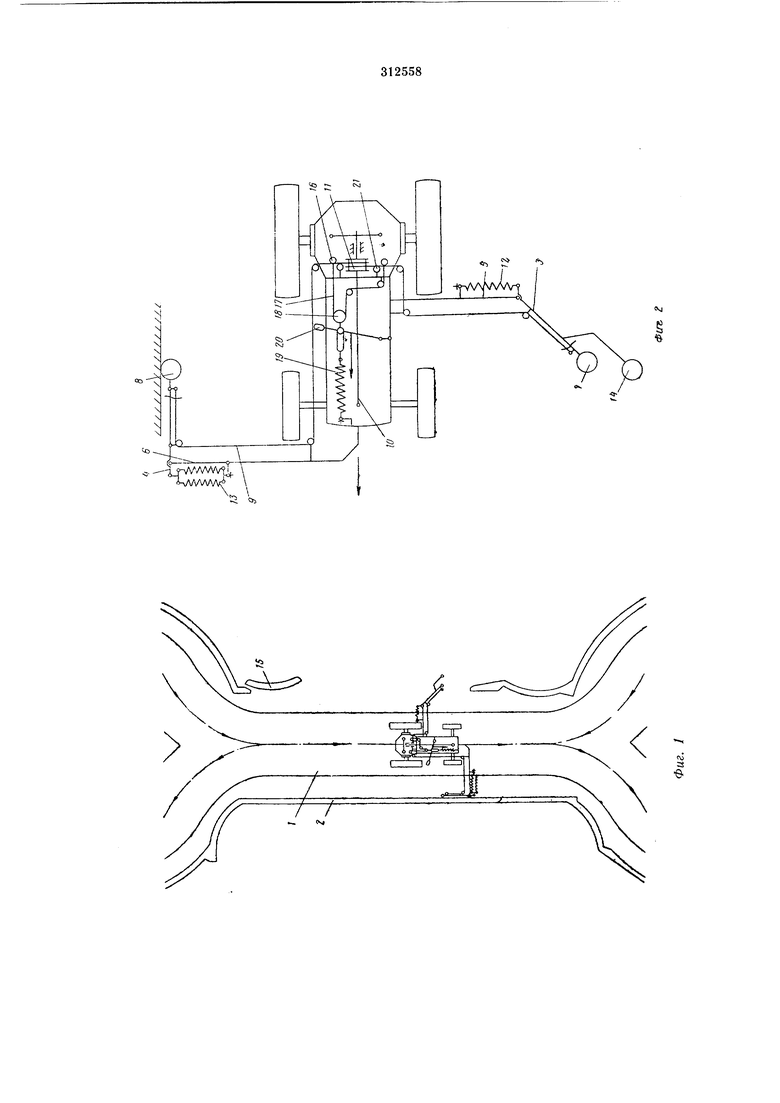
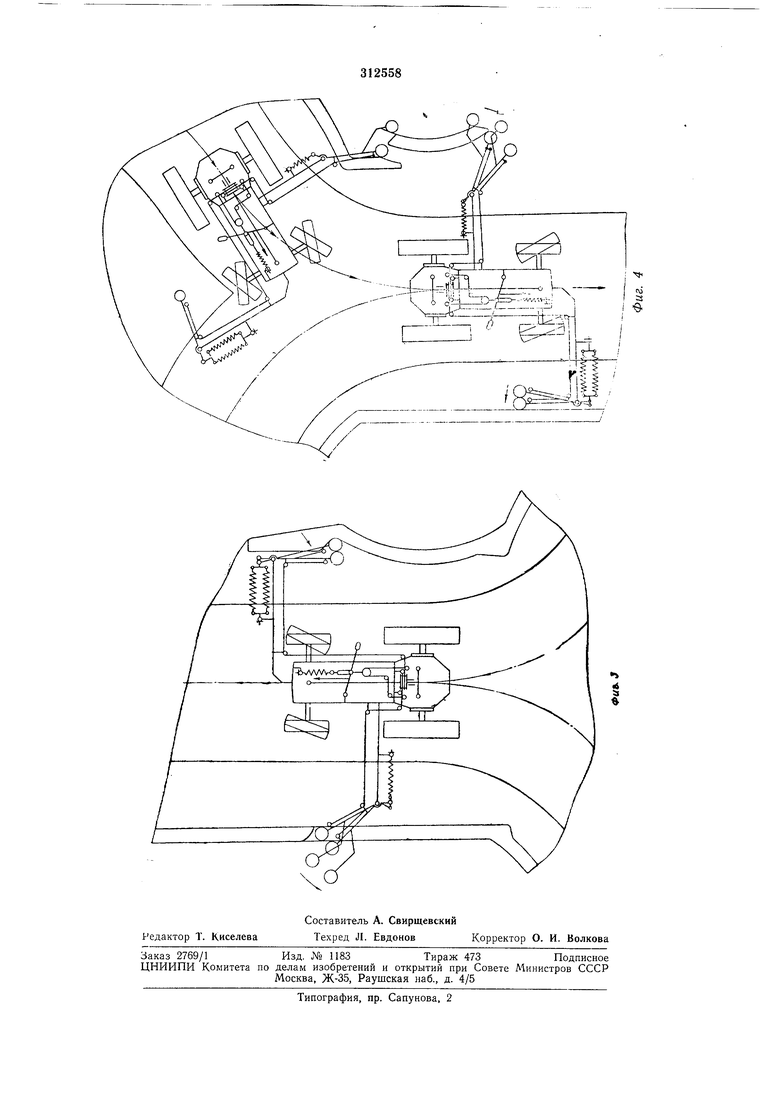
На фиг. 1 нзображено предлагаемое устройство; на фиг. 2 - трактор, вид в плане; на фиг. 3 и 4 - моменты работы на отдельных участках трека.
Трек / ограничен с внешней стороны ограждением 2 и имеет вид восьмерки.
Копирующий механизм представляет собой левый и правый 4 подпружиненные рычаги, шарнирно крепящиеся к соответствующим
выносным кронштейнам 5 и 6, на одних концах которых установле1ны копирующие катки 7 и 8. Рычаги между собой соединены тросом 9, проходящим через систему направляющих блоков и охватывающим установленный
па рулевом валу 10 шкив П.
Для обеспечения нормальной работы устройства и предотвращения возможности появления колебательных движений трактора в момент перехода на прямолинейное движеблагодаря силовому воздействию со стороны пружин 12 и }3, должны обуславливать у передних направляющих колес трактора постоянную тенденцию к повороту вправо.
Пружина 12 подбирается с таким расчетом, чтобы при условии отсутствия силового воздействия со стороны другой пружины на трос, первая из них могла самостоятельно произвести поворот передних направляющих колес трактора влево (момент, когда копирующий каток 8, наезжая на выступ направляющего барьера, отклоняется влево).
Для перемены направления разворота трактора в начале и конце прямолинейного гона левый копирующий каток обкатывает наружную боковую поверхность барьера, а правый - его внутреннюю поверхность. Конструктивно это достигается расположением катков на различной высоте относительно дорожного покрытия и изготовлением направляющего барьера одноступенчатым по высоте.
В целях сохранения постоянства радиуса кривизны при развороте трактора предусмотрен третий дополнительный каток 14, вступающий в контакт только с наружной поверхностью дуги 15 ограждения.
Для защиты от аварий устройство состоит из двух роликов 16, соединенных тросом 17, огибающим подвижной блок 18, который связан через контрольную пружину 19 с трактором.
Ролики выполняют роль датчиков аварийного излома одного из двух рычагов катков или пружин, или обрыва троса. Аварийная остановка трактора осуществляется путем мгновенного воздействия на рычаг 20 подачи топлива со стороны пружины. Ролики 21 обеспечивают нормальную навивку троса на щкив.
Устройство работает следующим образом.
Трактор, заезжая на трек со стороны, где отсутствует направляющее ограждение, ориентирует свое направление движения так, чтобы правый копирующий каток касался внутренней поверхности ограждения. Это положение трактора и является исходным для ввода в действие автоматического устройства.
Затем управление движением трактора осуществляется автоматически благодаря постоянному контролю за движением трактора со стороны катков. В конце прямолинейного участка гона правый копирующий каток, сбегая с прямолинейной поверхности ограждения на криволинейную, производит через трос поворот рулевого вала на угол, соответствующий последующему радиусу поворота трактора вправо.
Продолжая двигаться по этому радиусу, трактор правым катком наезжает на выступ
внутренней боковой поверхности ограждения и тем самым обуславливает свое дальнейщее движение по тому же радиусу, только уже влево.
При переходе на нрямолинейное движение трактор в конечном итоге, набегая своим правым катком на выступ на внутренней поверхности ограждения, меняет свое первоначальное направление движения на прямолинейное исходное только уже в обратную сторону. При этом одновременно левый копирующий каток введется в соприкосновение с наружной боковой поверхностью ограждения.
Дальнейшее вождение трактора производится под постоянным контролем со стороны левого катка следящего устройства, обкатывающего наружную боковую поверхность ограждения (по базовой линии).
В конце прямолинейного участка гона трактор аналогичным же образом развернется, но уже вправо. В момент перехода на прямолинейную траекторию движения дополнительный каток соскакивает с дуги ограждения и при этом благодаря наличию у трактора постоянной тенденции к повороту вправо, направляющие колеса самостоятельно поворачиваются вправо, а следовательно, и трактор, до тех нор, когда правый каток не коснется внутренней поверхности ограждения, расположенного справа по ходу от трактора.
Дальнейщее управление движением трактора осуществляется уже под постоянным контролем со стороны правого копирующего катка, скользящего по внутренней поверхности направляющего барьера.
Предмет изобретения
1.Устройство для автоматического вождения трактора при полигонных испытаниях, содержащее трос, обхватывающий щкив на рулевой колонке трактора, движущегося по треку, отличающееся тем, что, с целью вождения трактора по треку сложной конфигурации, например в виде восьмерки, концы троса прикреплены к подпружиненным рычагам, расположенным по бокам трактора и несущим катки, перемещающиеся по ограждению трека.
2.Устройство по п. 1, отличающееся тем, что, с целью сохранения постоянства радиуса кривизны на всех участках разворота, на тракторе на одной из его сторон установлен дополнительный рычаг с катком, копирующим наружную дугу ограждения трека.
3.Устройство, по пп. 1 и 2, отличающееся тем, что, с целью обеспечения защиты от аварий, трос связан с акселератором подачи топлива.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1980 |
|
SU934294A1 |
| Устройство для автоматического вождения мобильных агрегатов при ускоренных испытаниях на надежность | 1980 |
|
SU940671A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА УНИВЕРСАЛА | 2014 |
|
RU2577746C2 |
| СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023360C1 |
| РУЛЕВАЯ СИСТЕМА ПОВОРОТА КОЛЁС И ПОЛУРАМ ТРАКТОРА | 2015 |
|
RU2590762C2 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1976 |
|
SU671767A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| Устройство для автоматического вождения мобильных объектов на полигоне | 1981 |
|
SU1014491A1 |
J 3
