(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПРИ ИСПЫТАНИЯХ НА ПОЛИГОНЕ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1982 |
|
SU1059470A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПРИ ПОЛИГОННЫХ ИСПЫТАНИЯХ | 1971 |
|
SU312558A1 |
| Устройство для автоматического вождения мобильных агрегатов при ускоренных испытаниях на надежность | 1980 |
|
SU940671A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1976 |
|
SU671767A1 |
| Устройство для автоматического вождения тракторов при испытании на треке | 1981 |
|
SU957781A1 |
| Устройство для автоматического вождения трактора по замкнутой кривой | 1974 |
|
SU526305A1 |
| Устройство для ресурсных испытаний транспортных средств на полигоне | 1980 |
|
SU922570A1 |
| Устройство для автоматического вождения мобильных объектов на полигоне | 1981 |
|
SU1014491A1 |
| Устройство для автоматического вождения транспортного средства при испытаниях на полигоне | 1987 |
|
SU1478075A1 |
| Устройство для автоматического направления движения трактора | 1991 |
|
SU1766291A1 |

1
Изобретение относится к тракторостроению и может быть использовано для автоматического вождения трактора при ускореннйх функциональных ресурсных испытаниях на полигоне.
Известно устройство для автоматического вождения трактора при испытаниях на полигоне, содержащее трос, кинематически связанный с рулевым приводом испытываемого трактора и подпружиненный относительно его остова, якорь, закрепленный на ю полигоне, имеющий связь с указанным тросом 1 .
Недостатком известного устройства является низкая точность имитации эксплуатационных режимов. Это обусловлено тем, что при работе данного устройства направляющие колеса испытываемого трактора постоянно занимают неизменное положение, в результате рулевой привод и связанные с ним узлы трактора не испытываются.
Наиболее близким к предлагаемому яв- 20 ляется устройство для автоматического вождения трактора при испытаниях на полигоне, содержащее основной трос, кинематически связанный с рулевым приводом испытываемого трактора и подпружиненный относительно его остова, основной якорь, закрепленный на полигоне и имеющий связь с указанным тросом, и шкив, установленный на кронштейне, связанном с остовом трактора 2.
Недостатком данного устройства являются низкая надежность механизма связи между якорем и трактором, а также невозможность испытаний трактороъ в режимах, близких к эксплуатационным, например при работе трактора на гоне, сочетающей чередующиеся участки прямолинейного движения при повышенных скоростях с крутыми поворотами при пониженных скоростях. Устройство при повышенных скоростях движения трактора, больших диаметрах треков полигона и установке на нем неровностей для ускорения испытаний практически неработоспособно, так как в этих случаях невозможно обеспечить достаточную жесткость механической связи трактора с якорем.
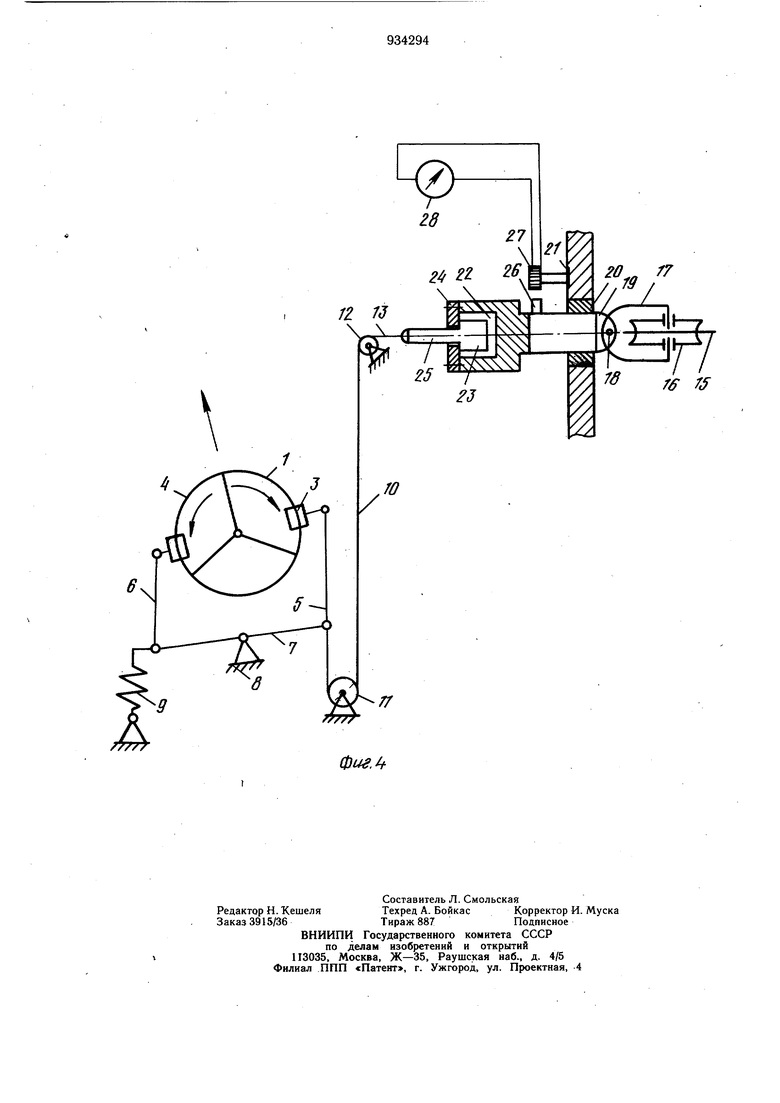
Цель изобретения - повышение эффективности испытаний путем приближения режимов движения трактора при испытаниях на полигоне к условиям эксплуатации при движенки трактора на участках, близких к прямолинейным, и на крутых поворотах. Поставленная цель достигается тем, что устройство снабжено дополнительным тросом и дополнительным якорем, закрепленным на полигоне, упомянутый шкив связан с кронштейном шарнирно, а последний поворотно закреплен на остове трактора, при этом оба якоря соединены с испытуемым трактором тросовой связью, состояшей из двух ветвей, одной из которых связаны рулевой привод трактора и указанный кронштейн, а другой - шкив и оба якоря, установленные в фокусах эллипсной траектории движения трактора. . На фиг. 1 и 2 изображена кинематическая схема устройства; на фиг. 3 - схема устройства при движении трактора от точки D к точке А; на фиг. 4 - схема -устройства при движении трактора от точки А к точке С. На рулевом колесе 1 испытываемого трактора 2 закреплены зажимы 3 и 4, к которым присоединены тяги 5 и 6, связанные с двуплечим рычагом 7, шарнирно установленным на остове 8 трактора. Двуплечий рычаг 7 одним концом связан с остовом через пружину 9, а другим - с основным тросом 10, охватывающим блоки 11 и 12, шарнирно установленные на остове трактора. На полигоне закреплены два якоря основной 13 и дополнительный 14, соединенные с дополнительным тросом 15, охватываюшим шкив 16. Шкив 16 шарнирно установлен в вилке 17, соединенной шарнирно 18 с кронштейном 19, установленным на подшипниках 20 в стойке 21, крепяшейся на остове трактора. В кронштейне 19 выполнена цилиндрическая выемка 22, в которую помещен палец 23, удерживаемый в .выемке 22 с помощью крышки 24, прикрепленной к кронштейну 19. Крышка 24 имеет отверстие для выхода хвостовика 25, к которому прикреплен основной трос 10. На поворотном кронштейне 19 закреплен магнит 26, взаимодействующий с индуктивной катушкой 27, в цепь которой включен импульсный счетчик 28. Устройство работает следующим образом. При движении испытываемого трактора 2 шкив 16 перемешается по дополнительному тросу 15. По мере приближения трактора 2 к якорю 13 уменьшается расстояние от трактора до большой оси эллипса, соединяющей оба якоря 13 и 14, размещенные в фокусах эллипса. В результате на щкив 16 со стороны дополнительного троса 15 действует усилие, под действием которого кронштейн 19 перемещается вправо, поворачивая рулевой привод по часовой стрелке (фиг. 3). При этом направляющие колеса трактора 2 поворачиваются вправо. В момент прохождения трактором точки А скручивание дополнительного троса 15 предотвращается, так как кронштейн 19 имеет возможность вращения в подшипниках 20 относительно стойки 21, а крышка 24 - относительно торца пальца 23. После прохождения трактором 2 точки А усилие, действующее на шкив 16 со стороны дополнительного троса 15, уменьшается. Под действием пружины 9 рулевой привод 1 поворачивается против часовой стрелки, поворачивая направляющие колеса трактора влево (фиг. 4). По мере перемещения трактора от точки А к точке С угол поворота рулевого привода 1, а следовательно, и направляющих колес, уменьшается. При движении трактора от точки С к точке В угол поворота направляющих колес трактора вновь увеличивается. Таким образом, при движении трактора по эллипсной траектории непрерывно периодически изменяется угол поворота направляющих колес трактора. При этом в сопряжениях рулевого привода трактора создаются нагрузки, характерные для эксплуатационных условий, поскольку участки траектории, близкие к прямолинейным (где движение трактора происходит с высокими скоростями), периодически чередуются с участками, имитирующими крутые повороты (движение на этих участках осуществляется с малыми скоростями). В момент перехода трактором точек А и В кронштейн 19 поворачивается, при этом в результате взаимодействия магнита 26 с индуктивной катушкой 27 импульсный счетчик 28 показывает удвоенное число прохождения трактором всей замкнутой траектории. Предлагаемое устройство достаточно просто в изготовлении, наладке и обслуживании, оно повышает точность имитации эксплуатационных режимов движения, что выгодно отличает его от известных устройств. Экономичекий эффект от внедрения составляет около 60 тыс. руб. Формула изобретения Устройство для автоматического вождения трактора при испытаниях на полигоне, содержащее основной трос, кинематически связанный с рулевым приводом испытываемого трактора и подпружиненный относительно его остова, основной якорь, закрепленный на полигоне и связанный с тросом, и шкив, установленный на кронштейне, связанном с остовом трактора, отличающееся тем, что, с целью повь1шения эффективности испытаний путем приближения режимов движения трактора при испытаниях на полигоне к условиям эксплуатации при движении трактора на участках, близких к прямолинейным, и на крутых поворотах, оно снабжено дополнительным тросом и дополнительным якорем, закрепленным на полигоне, шкив связан с кронштейном шарнирйо, а последний поворотно закреплен на остове трактора, при этом оба якоря соединены с испытуемым трактором тросовой связью, состояш,ей из двух ветвей, одной из которых связаны рулевой привод трактора и указанный кронштейн, а другой - шкив
и оба якоря,устаной енные в фокусах эллипсной траеткории движения трактора.
Источники информации, принятые во внимание при экспертизе
№ 617767, кл. А Ш В 69/04, 1976 (прототип) .
фиел rff /
