(54) УСТРОЙСТВО ДЛЯ РЕСУРСЮК ИСПЫТАНИЙ ТРАКТОРОВ НА ПОШГОНЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического направления движения гусеничного трактора по круговой траектории | 1980 |
|
SU865156A2 |
| Система автоматического вождения тракторов при испытаниях на полигоне | 1976 |
|
SU635910A1 |
| Устройство для ресурсных испытаний тракторов по кольцевой дорожке | 1985 |
|
SU1303876A1 |
| Устройство для автоматического вождения мобильных объектов на полигоне | 1981 |
|
SU1014491A1 |
| Устройство для автоматического вождения трактора по программной траектории движения | 1980 |
|
SU869597A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Устройство для испытания трактора на полигоне | 1980 |
|
SU932348A1 |
| Механизм управления гидравлическим экскаватором | 1982 |
|
SU1027352A1 |
| Гидропривод экскаватора | 1981 |
|
SU1028792A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1980 |
|
SU934294A1 |
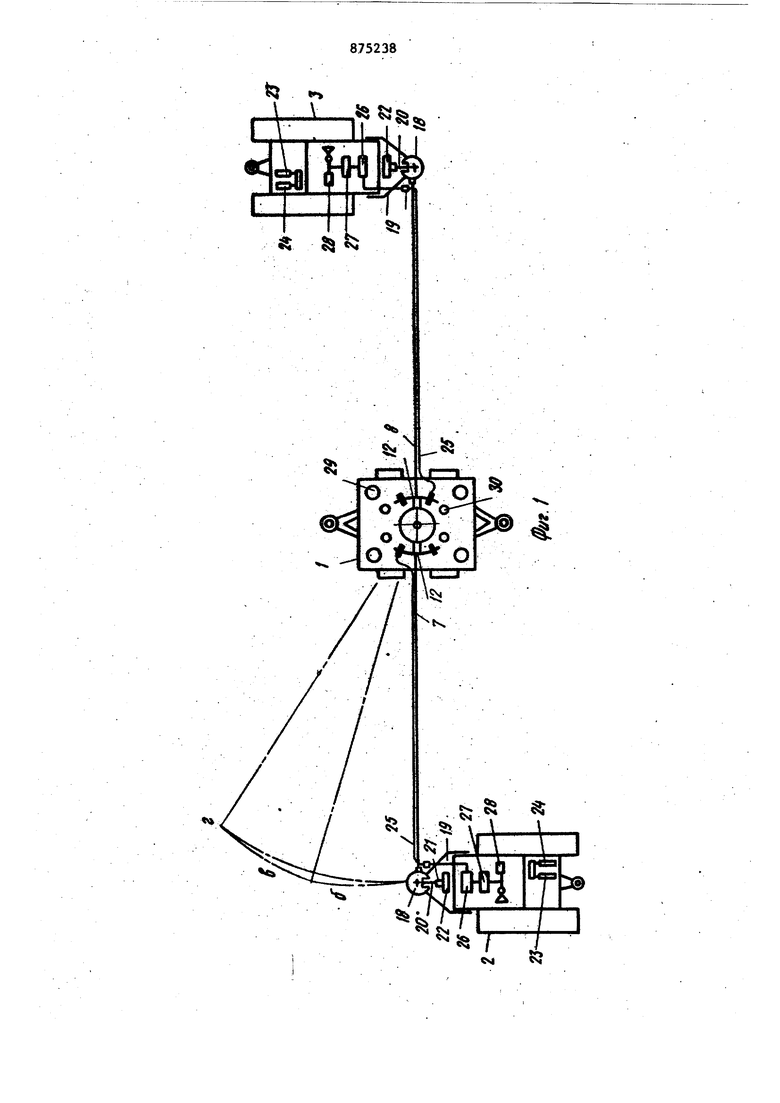
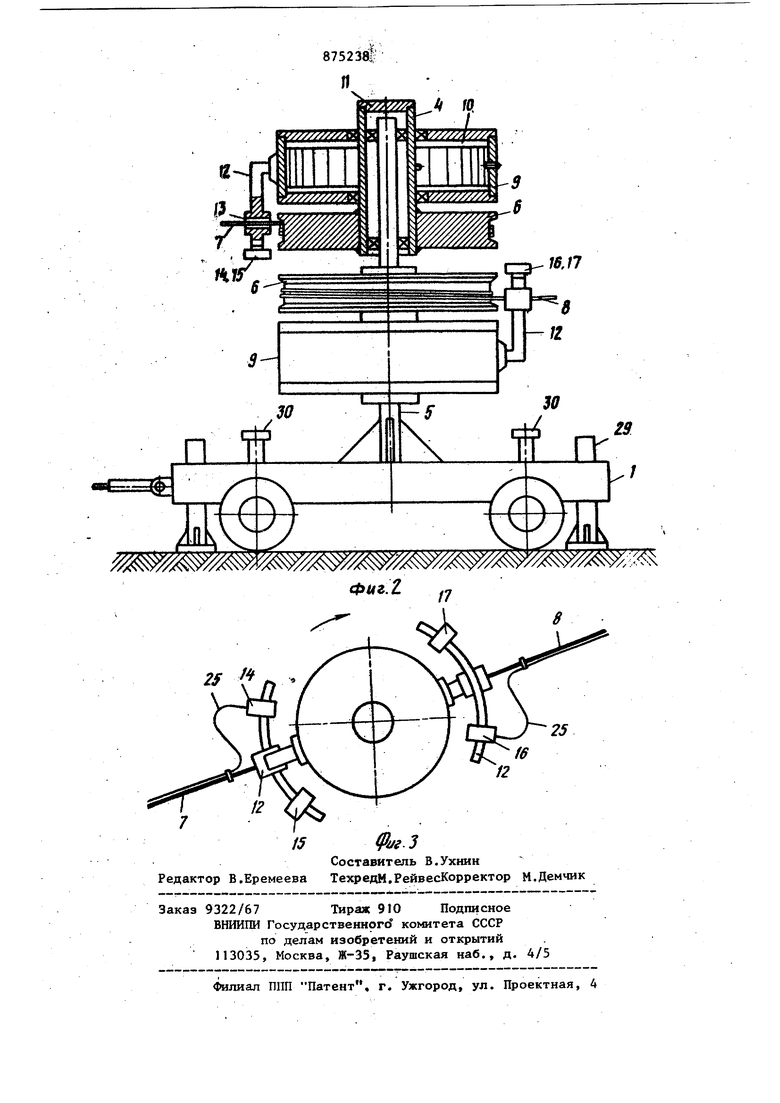
... I ,, . - , 1{зобретенйё относится к испытательной техи1ке и может быть исполь- зовано 1ЩИ ресурсших испытаниях тракторов на полигоне. Известно устройство для ресурсных испдтанйй тракторов на полигоне, содержащее поворотно-натяжной механизм, выполненньШ из нескольких секций число которых равно числу одновременно иcпытьraae в Ix тракторов, тросы каждый из которых связан с соответствующей секцией и системой управления направлением движения, установленной иа каждом тракторе, датчики положения трактора Hat траектории, установленные на каждой секции и подключенные к программному блоку,установленному на каждом из испытываемых. тракторов и связанному посредством исполнительного механизма с регулятором скорости движения трактора 3« Недостатком известного устройства является малая производительность, обусловленная быстрым износом беговой дорожки полигона при одновремеН ном движении по ней нескольких тракторов, что приводит к перерывам в испытаниях я вызывает необходимость частых затрат времени на восстановление дорожки полигона. Цель изобретения - повышение производительности. Эта цель достигается тем, что . предлагаемое устройство снабжено передвижной платформой, на которой установлен повЪротно-натяжной механизм.. На фиг.1 изображено схематически предлагаемое устройство; на фиг.2 передвижная платформа с установленным на ней поворотно-натяжным механизмом; на фиг.З - схема установки датчиков положения трактора на траектории. В центре полигона установлена передвижная платформа1, на которой размещен поворотно-натяжной механизм выполненный из нескольких секций. число которых равно числу испытыва0«iix тракторов 2 и 3. Каждая секция состоит из втулки 4, шарнирно устано леиной на валу 5, закрепленном на передвижной платформе I. На втулке А жестко закреплен шкив 6 с намотанным на него тросом. Трос 7 связан с трактором 2, а трос 8 - с трактором 3. На втулке 4 шарнирно установлен барабан 9 с размещенной внутри него плоской спиральной пружиной -10, один конец которой присоединен к втулке 4, а другой - к внут ренней стенке барабана 9. Втулка 4 сверху закрыта кгшшкой II. На барабане 9 жестко закреплен кронштейн 12 с отверстием 13 для выхода троса На каждом кронштейне I2 установлены попарно датчики положения 14 и 15 и и 17 трактора на траектории. Датчики установлены на определенных уровнях относительно поверхности полигона, обеспечивающих взаимодействие их между собой при сближении друг с другом. Система управления направлением движения транспорта содержит управля ющую шайбу 18, установленную на вертикальной оси, смонтированной на площадке 19, закрепленной в передней части трактора. Управляющая шайба 18 имеет вырез,в который входит упру гий элемент 20, связанный с рычагом 21 гидрораспределителя 22. Рычаг 21 -имеет три фиксированных положения нейтраль, пойорот влево и поворот вправо. П1дрораспределитель 22 ;подключен к источнику давления, име .щемуся на испытываемом тракторе, и связан с гидроцилиндрами 23 , соединенш 1МИ с органами управления механизмом поворота трактора. Датчики положения 14 и 15 и 16 и I7 с помощью кабеля 25 подключены к программному блоку 26, связанному с исполнительным механизмом 27, сое диненным с регулятором 28 скорости движения трактора. Для повышения устойчивости перед вижная платформа 1 снабжена выдвижными упорами 29. Дпя намотки тросов на передвижной платформе 1 установлены- стойки 30. В начальный момент (положениеС| трактора 2 на фиг.|) управляющая шайба. 18 не воздействует на рычаг 21 гидрораспределителя, который в этом случае будет находиться в по жении нейтраль. Трактор 2 будет 84 двигаться по прямой О - сГ, сматывая трос 7 до шкива 6, до тех пор,пока управляющая maii6a 18, вращаюшаяси на вертикальной оси, не переведет рычаг 21 с помощью упругого элемента 20 в положение поворот вправо (точка df). Трактор 2 будет поворачиваться вправо до тех пор, пока управляющая шайба 18 при своем вра щеиии НС возвратит рычаг 21 гидрораспределителя 22 D положение нейтраль ( точка ). Далее трактор будет двигаться по прямой до достижения точки t . Ослабляющийся в процессе поворота трактора 2 трос 7 под действием предварительно закрученной плоской пружины 10 будет наматываться на шкив 6. Движение трактора 3 аналогично движению трактора 2. При движении испытываемых тракторов одновременно будут поворачиваться и связанные с ними посредством тросов 7 и 8 и соответствующие секции поворотно-натяжного механизма. Если тракторы удалены друг от друга на безопасное расстояние, то взаимодействия датчиков 14 и 15 с датчиками 16 и 17 не происходит-,и регуляторы 28 скорости движения тракторов неподвижны. При сближении тракторов под влиянием неизбежных отлнччй в скоростях движения до предельно допустимой дистанции датчики сблизятся на расстояние, при котором ока-, жется возможным их взаимодействие. В резуль.тате взаимодействия датчиков появляется командный сигнал, который по кабелю 25 .поступает в программный блок 26 каждого трактора. Программный блок 26 вырабатывает ис- полнительному механизму 27 воответствующие команды, что привода|т к снижению скорости движения опережающего трактора и повышению скорости движения отстающего трактора. В результате зтого, расстояние между тракторами увеличивается и тем самым устраняется опасность столкновения тракторов. Через заданное время программный блок снимает управляющее воздействие на исполнительный механизм, прекращая перемещение регуляторов скорости. Спустя некоторое время после испытаний в результате интенсивного износа рабочей дорожки полигона возникает иеобходимрсть передислокации тракторов на новый участок полигона. Дпя этого испытание тракторов останавливают, тросы 7 и 8 отсоединяют от управляющих шайб 18 и наматывают на стойки 30, закрепленные на передвижной платформе I . Кабель 25 также укладывают на передвижной платфо ме I .Выдвижные упоры 29 поднимают и фи сируют в транспортном положении. Зат передвижную платформу I вместе с уст новленным на ней поворотно-натяжньи механизмом с помощью одного из ислытываемых тракторов перемещают на новое место и продолжают испытания. Благодаря установке поворотно-иа тяжкого механизма на передвижной платформе значительно сокращаются пе рерывы в испыта1шях и повышается их производительность. Формула изобретения Устройство для ресурсшлх ис1штани тракторов на полигоне, содержащее поворотно-натяжной механизм, выполненный из нескольких секций, число которых равно числу одновременно нспы тываемых тракторов, тросы, каждый из которых связан с соответствующей секцией и системой управле1{ия направлением движения, установленной на каждом тракторе, датчики положения трактора на траектории, установленные на каждой секции и подключенные к программному блоку, ycj-ановленному на каждом из испытынаемых тракторов и связанному посредством исполнительного механизма с регулятором скорости движения трактора, отличающееся тем, что, с целью повышения производительности, оно снабжено передвижной платформой,на которой устаноапен поворотно-натяжной механизм. Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР № 635910, кл; А Ot В 69/04, 1976 (прототип).
§5
