Изобретение относится к тракторостроению и предназначено для использования при проведении ускоренных полигонных испытаний на надежность.
Известно достаточно много устройств для автоматического направления движения трактора, большую часть составляют ус- тройства, осуществляющие движение трактора на треке по круговой траектории, включающие трос, прикрепленный одним концом к установленному в центре якорю, а другим к исполнительному механизму управления направлением движения трактора (Авт.свид. № 671767, кл. А 01 В 69/04, 1979. Авт. свид. № 643155, кл. А 01 В 69/04, 1979, Авт. свид. N5 75062, кл. А 01 В 69/04, 1980. Авт.свид. №801769, кл. А 91 В 69/04, 1981).
Или содержащие опорную траекторную направляющую в виде рельсового пути с тележкой, соединенной шарнирно тягой с кронштейном на передней части рулевого управления трактора (Авт. свид. № 599757, кл. А01 В 69/04, 1975. Авт.свид. № 1371548, кл. А 01 В 69/04, 1986).
Недостатком данных устройств является то, что при круговой траектории движения возникают не характерные для производственной эксплуатации отказы в работе из-за одностороннего износа, а также нарушается цикличность загрузки управления трактора.
Известно также устройство для автоматического вождения тракторного агрегата по шпалевой проволоке, снабженное электрическим роликом-проволкоулавливателем, взаимодействующим через импульсный рычаг с электроконтактной коробкой, управляющей действием электромагнитных муфт поворота трактора 1,
Недостатком этого устройства является невозможность его использования для автоматического вождения по сложной траектории и профилю испытательного полигона.
Цель изобретения - расширение функциональных возможностей путем обеспече- ния движения трактора по полигону со сложной траекторией и профилем.
Указанная цель достигается тем, что устройство включает в себя механизм поворота штанги, содержащей нижнюю плиту, установленную неподвижно на тракторе с возможностью поворота относительной нижней, при этом на верхней плите размещены в направляющих ползуны, связанные с водилом и гидроусилителями трактора по- средством тросов в оболочке, а траекторно- направляющий провод подвешен над испытательной дорожкой полигона и связан с кареткой штанги улавливателями замкового типа.
Новым является то, что штанга имеет две степени свободы относительно основания и жестко соединена с водилом, два ползуна, установленные в направляющих, соединены с золотниками гидроусилителей бортовых фрикционов при помощи тросов в оболочке, верхняя плита соединена с нижней плитой через ось, для гашения колебаний установлены деформирующие гидроцилиндры, нижняя плита крепится к раме, которая устанавливается над кабиной трактора.
Это позволяет осуществлять автоматическое направление движения как по траектории, заданной подвешенным проводом, так и движения по пересеченному профилю за счет рабочего хода штанги в вертикальной плоскости, что повышает надежность работы устройства при движении трактора на полигоне со сложным профилем и траекторией.
Другие технические решения, содержащие признаки, отличающие от прототипа, в процессе поиска не выявлены, следовательно, заявляемое решение соответствует критерию существенные отличия.
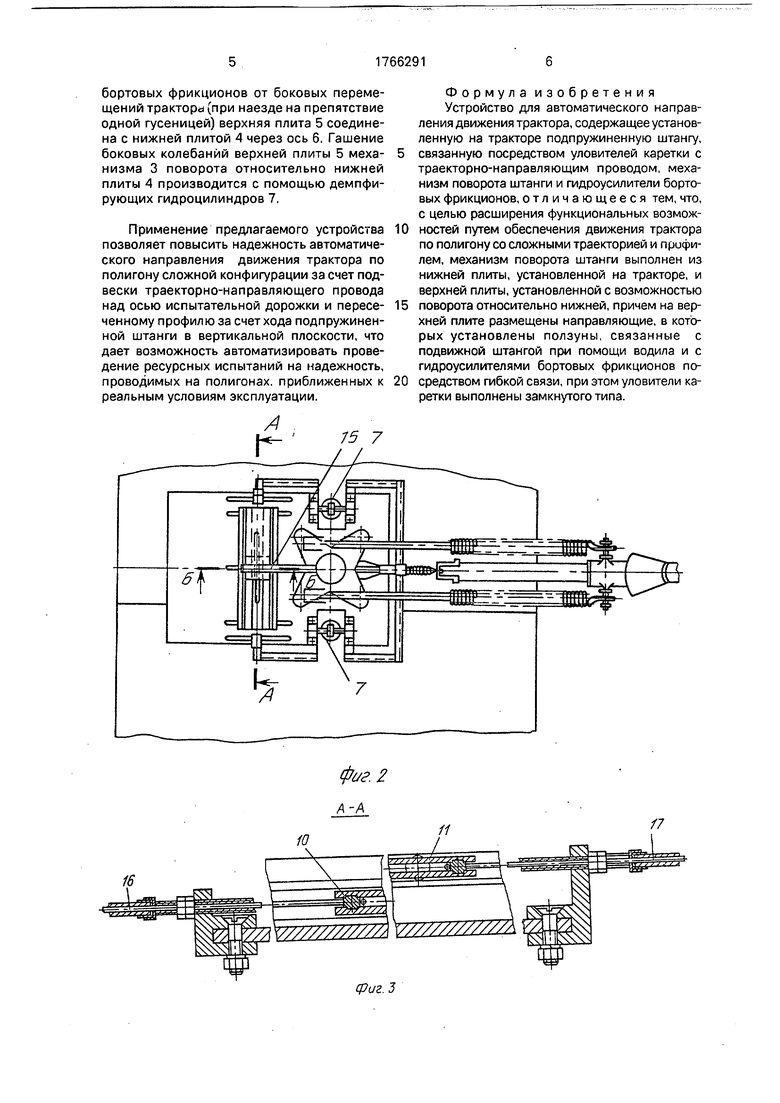
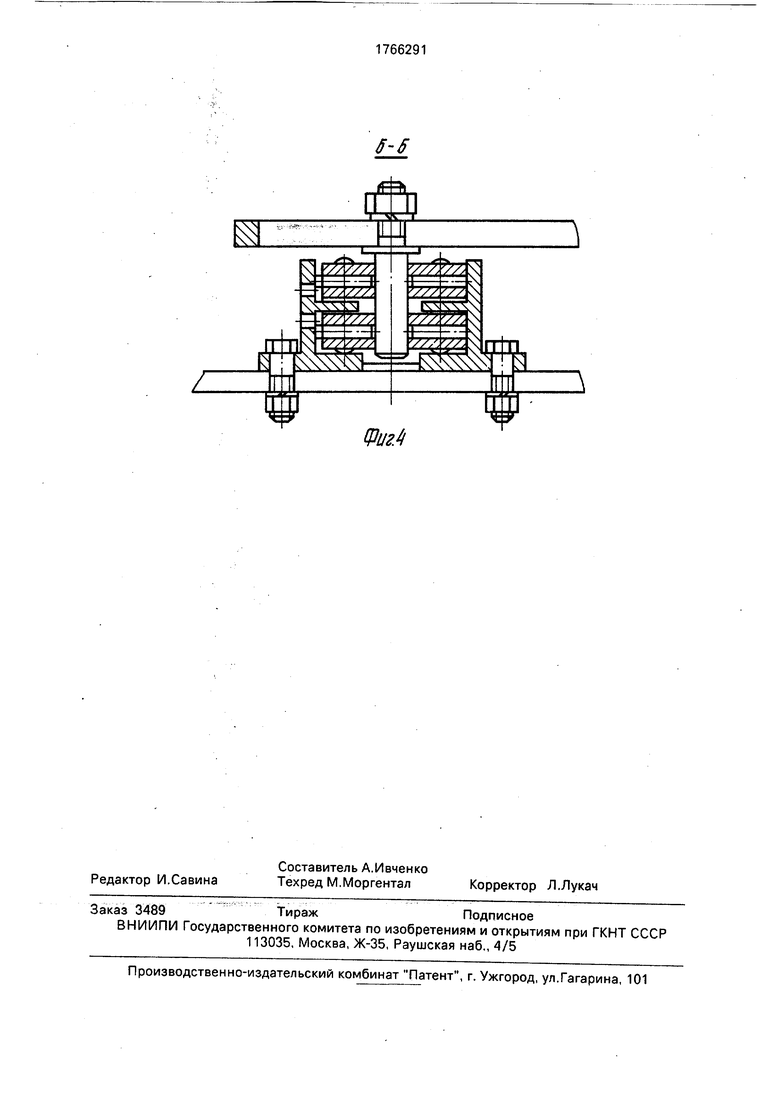
На фиг. 1 изображено устройство; на фиг. 2 - вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2.
Устройство содержит траекторно-на- правляющий провод 1, который подвешивается над испытательной дорожкой вдоль ее оси. Над кабиной трактора устанавливается рама 2, на которой крепится механизм 3 поворота, состоящий из нижней 4 и верхней 5 плит, соединенных через ось 6, а также демфирующие гидроцилиндры 7. На верхней плите крепятся направляющие 8 и 9, в которых установлены ползуны 10 и 11, а также подпружиненная штанга 12, связанная верхней частью при помощи каретки 13 с улавливателями 14 замкового типа, подвижно с направляющим проводом, нижней при помощи водила 15 с ползунами. Ползуны соединены с золотниками гидроусилителей бортовых фрикционов посредством тросов в оболочке 16 и 17.
Устройство работает следующим образом,
При уходе трактора с курса, заданного траекторно-направляющим проводом 1, происходит отклонение штанги 12 в горизонтальной плоскости от оси трактора, водило 15 воздействует на один из ползунов 10 и 11, передвигающихся в направляющихся 16 и 17, механизма 3 поворота и далее через троса в оболочке 16 и 17 на гидроусилитель соответствующего бортового фрикциона. Ход подпружиненной штанги 12 в вертикальной плоскости позволяет осуществлять движение по пересеченному проф- илю. Для исключения срабатывания
бортовых фрикционов от боковых перемещений трактора (при наезде на препятствие одной гусеницей) верхняя плита 5 соединена с нижней плитой 4 через ось 6. Гашение боковых колебаний верхней плиты 5 механизма 3 поворота относительно нижней плиты 4 производится с помощью демпфирующих гидроцилиндров 7.
Применение предлагаемого устройства позволяет повысить надежность автоматического направления движения трактора по полигону сложной конфигурации за счет подвески траекторно-направляющего провода над осью испытательной дорожки и пересе ченному профилю за счет хода подпружиненной штанги в вертикальной плоскости, что дает возможность автоматизировать проведение ресурсных испытаний на надежность, проводимых на полигонах, приближенных к реальным условиям эксплуатации.
-
Формула изобретения Устройство для автоматического направления движения трактора, содержащее установленную на тракторе подпружиненную штангу,
5 связанную посредством уловителей каретки с траекторно-направляющим проводом, механизм поворота штанги и гидроусилители бортовых фрикционов, отличающееся тем, что, с целью расширения функциональных возмож10 ностей путем обеспечения движения трактора по полигону со сложными траекторией и профилем, механизм поворота штанги выполнен из нижней плиты, установленной на тракторе, и верхней плиты, установленной с возможностью 15 поворота относительно нижней, причем на верхней плите размещены направляющие, в которых установлены ползуны, связанные с подвижной штангой при помощи водила и с гидроусилителями бортовых фрикционов по20 средством гибкой связи, при этом уловители каретки выполнены замкнутого типа.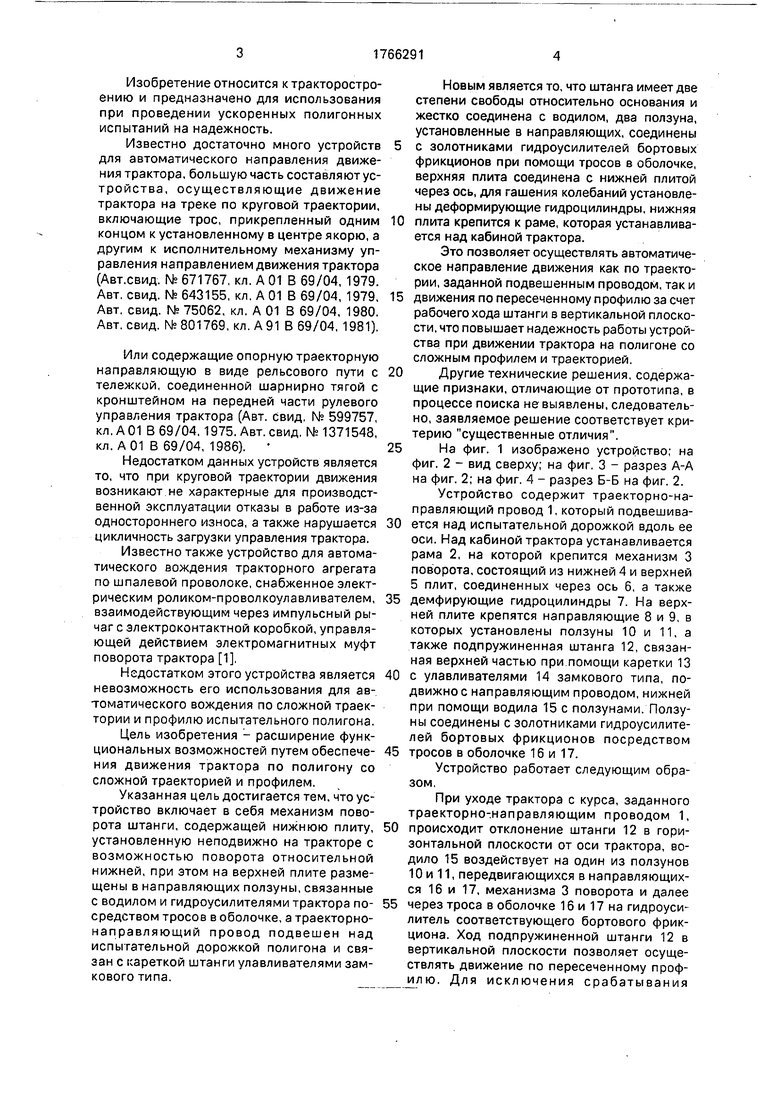
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ресурсных испытаний тракторов по кольцевой дорожке | 1985 |
|
SU1303876A1 |
| Устройство для автоматического вождения трактора по программной траектории движения | 1980 |
|
SU869597A1 |
| Устройство для ресурсных испытаний тракторов на полигоне | 1980 |
|
SU875238A1 |
| Устройство для автоматического направления движения колесного трактора с шарнирно-сочлененной рамой | 1987 |
|
SU1598895A1 |
| Устройство для испытания трактора на полигоне | 1980 |
|
SU932348A1 |
| Устройство для загрузки при испытаниях трактора на полигоне | 1989 |
|
SU1658005A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1980 |
|
SU934294A1 |
| Устройство для ресурсных испытаний транспортных средств на полигоне | 1980 |
|
SU922570A1 |
| Устройство для автоматического вождения мобильных агрегатов при ускоренных испытаниях на надежность | 1980 |
|
SU940671A1 |
| Станок для фасонной резки труб | 1979 |
|
SU829363A1 |
Использование: сельскохозяйственное машиностроение, при проведении ускоренных полигонных испытаний на надежность. Устройство для автоматического направления движения трактора содержит трактор- но-направляющий провод 1, который подвешивается над испытательной дорожкой вдоль ее оси. Над кабиной трактора устанавливается рама 2, на которой крепится механизм 3 поворота, состоящий из нижней 4 и верхней 5 плит, соединенных через ось 6, а также демпфирующие гидроцилиндры 7 Над верхней плите 5 крепятся направляющие 8 и 9, в которых установлены ползуны, а также подпружиненная штанга 12, связанная верхней частью при помощи каретки 13 с улавливателями 14 замкового типа, подвижное направляющим проводом, нижней при помощи водила с ползунами, Ползуны соединены с золотниками гидроусилителей бортовых фрикционов посредством гибких связей.4 ил. .. .--- -/- / и (л С xi о Os ю ю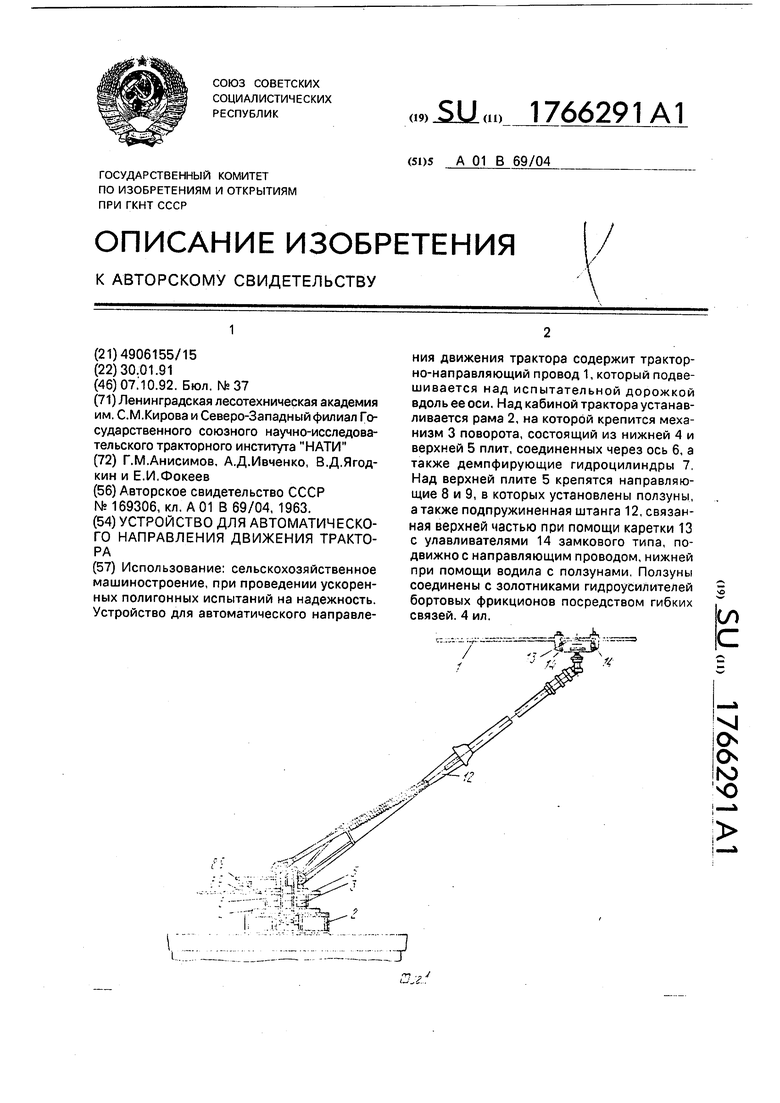
фиг. 2
А-А
16
(риг 3
/E3L
te
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ \ ТРАКТОРНОГО АГРЕГАТА ПО ШПАЛЕРНОЙ ПРОВОЛОКЕ^" МЕЖДУРЯДИЙ ВИНОГРАДНИКОВ | 0 |
|
SU169306A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
