Устройство относится к обработке металлов давлением, в частности к устройствам для гибки труб с одновре менной осадкой и нагревом ТВЧ, и может быть использовано в машиностроительной и металлообрабатьгоакицей отраслях промышленности для гибки тонкостенных труб.
Целью изобретения является повышение качества гиба за счет поддержания усилия осевой осадки на заданном уровне, расширение номенклатуры изготовляемых изделий и увеличение производительности устройства.
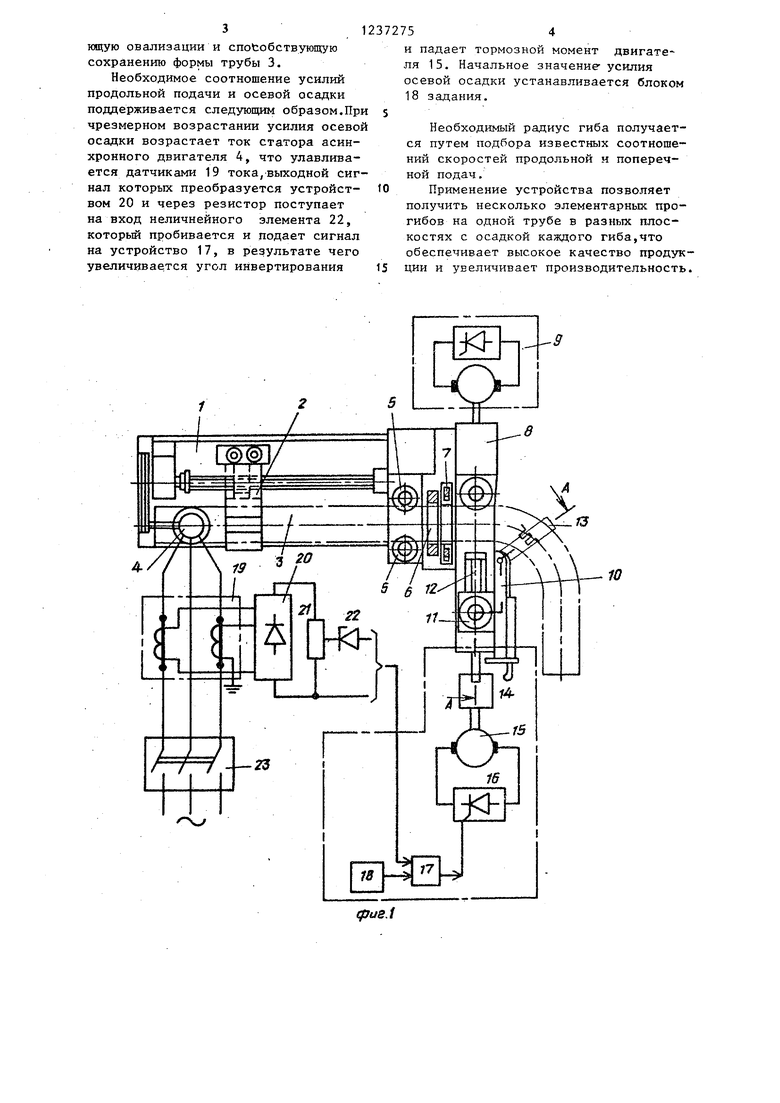
На фиг. 1 схематически изображен станок для гибки труб с осевой осадкой и нагревом ТВЧ; на 4мг. 2 - разрез А-А на фиг. 1 с фрагментом механизма осевой осадки.
Станок содержит станину 1 с установленными на ней кареткой 2 про- АО.ТШНОЙ подачи трубы 3 с приводом о г асинхронного двигателя 4, направляющими роликами 5, нагревательное устройство 6, охлаждакяцее приспособление 7, нажимное устройство 8 с приводом от регулируемого двигателя 9 достоянного тока,водило 10, вра щакяцееся на оси 11 настроечного ме- канизма 12, с захватом 13 для трубы, механизм 14 осевой осадки, связанный с водилом 10 и двигателем 15 постоянного тока, тиристорный инвертор 16 напряжения, устройство 17 управления тиристорным инвертором, блок 18. задания, датчики 19 тока, выпрямительное устройство 20, регулируемый резистор 21, нелинейный элемент 22, коммутационный аппарат 23, механизм 24 регулирования длины водила, выпол ненньй в виде винта и гайки. Ось 11 в направляющих станины перемещается настроечным механизмом 12, вьтолнеи- ным в виде винта и гайки.
В качестве тиристррного инвертора 16 может быть применен стандартный тиристорный преобразователь с устройством управления, позволяющим суммировать,усиливать сигналы и выдавать управляющие импульсы в функции результирующего сигнала. В качестве блока 18 задания может быть применен бесконтактный сельсинный аппарат или подобное устройство. В качестве датчиков 19 тока могут быть применены трансформаторы тока, включенные в одну, две или три фазы двигателя.
Выпрямительное устройство 20 может быть реализовано диодным вьтрями- телем, собранным по трехфазной мостовой схеме. В качестве нелинейного злемента 22 может быть применен стабилитрон или подобное ему устройство.
В качестве коммутационного аппарата 23 может быть применен магнитный пускатель или автоматический выклю 1атель.
Якорь двигателя 15 подключен к входу инвертора 1б, блок 17 управле- |ния выдает управляющие импульсы на тиристоры инвертора с углом управле- .
ния, определяемым алгебраической суммой задающего сигнала и сигнала, поступающего с выхода нелинейного эле-: мента 22.
Станок работает следующим образом.
Настроечным .механизмом 12 устанавливают центр вращения водила 10 на расстоянии от оси трубы 3, равном заданной величине радиуса гиба, затем зажимают трубу 3 в каретке 2 продольной подачи и направляющих роликах 5, включают двигатель 4 продольной подачи и пропускают трубу через нагревательное устройство 6 и охлаждающее приспособление 7. Регулировочным механизмом 24 подводят захват 13 водила 10 к трубе и зажимают ее в захвате при отключенном двигателе. Вклю- чают двигатель 9 нажимного устройства 8 и подводят последнее к трубе
между захватом 13 и охлаждающим приспособлением 7.
0
Включают нагревательное устройство 6 при выключенных двигателях механизма продольной, поцеречной и осевой подач. Под действием ТВЧ-индуктора труба 3 нагревается до температуры гиба, равной 750-1 . После этого устнавливают блрком задания 18 необходимый угол инвертирования, соответ- ствукяций заданному усилию осевой осадки, включают асинхронный двигатель 4, привод 9 нажимного устройства 8, привод осевой осадки, охлаждающее
приспособление 7. Под действием усилия продольной подачи и осевого усилия труба осаживается на нагретом участке под индуктором 6, а усилием нажимного устройства 8 создаются зле5 ментарные прогибы, Охлаядакицим приспособлением 7 элементарные прогибы ох- )тся до 400-600 с металл получает высокую жесткость препятствующую овализации и споЬобствующую сохранению формы трубы 3.
Необходимое соотношение усилий продольной подачи и осевой осадки поддерживается следующим образом.При чрезмерном возрастании усилия осевой осадки возрастает ток статора асинхронного двигателя 4, что улавливается датчиками 19 тока, выходной сигнал которых преобразуется устройством 20 и через резистор поступает на вход неличнейного элемента 22, который пробивается и подает сигнал на устройство 17, в результате чего увеличивается угол инвертирования
и падает тормозной момент двигате- ля 15. Начальное значение- усилия осевой осадки устанавливается блоком 18 задания.
Необходимый радиус гиба получается путем подбора известных соотношений скоростей продольной и поперечной подач.
Применение устройства позволяет получить несколько элементарных прогибов на одной трубе в разных плоскостях с осадкой каждого гиба,что обеспечивает высокое качество продукции и увеличивает производительность.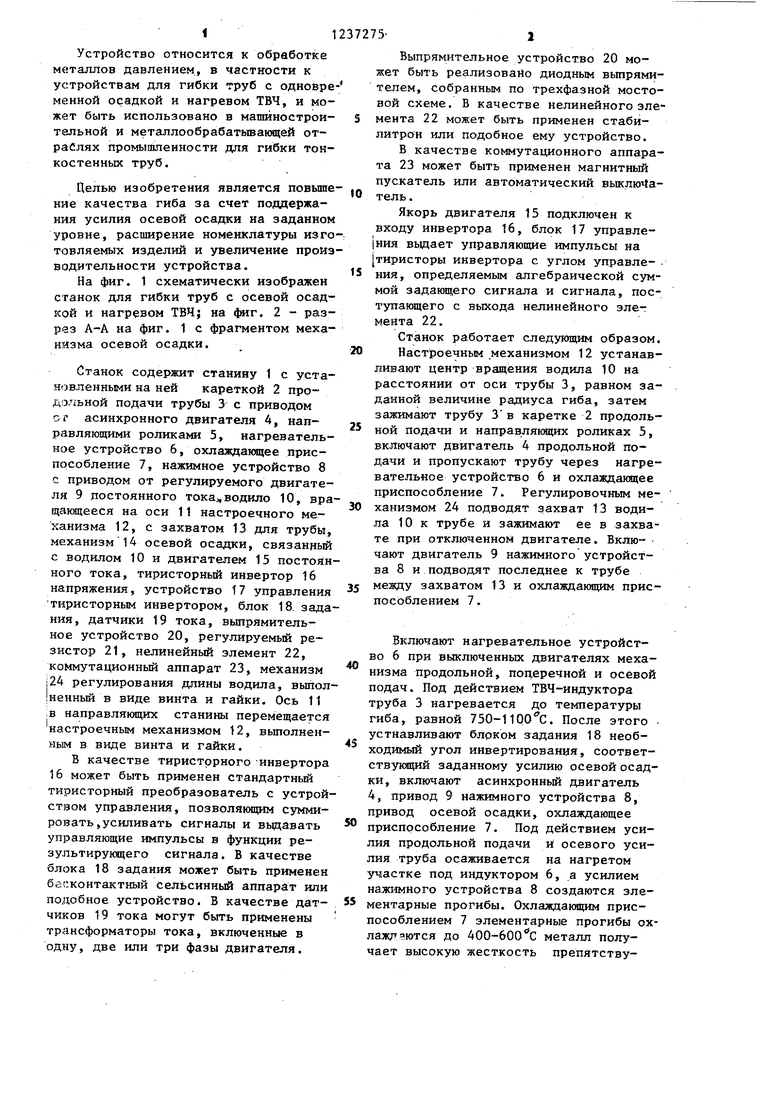
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гибки | 1985 |
|
SU1412835A2 |
| Способ гибки труб и устройство для его осуществления | 1978 |
|
SU741987A1 |
| Станок для гибки труб | 1979 |
|
SU844098A1 |
| Станок для гибки труб | 1979 |
|
SU904835A1 |
| Трубогибочный станок | 1956 |
|
SU110447A1 |
| Способ гибки труб и устройство для его осуществления | 1979 |
|
SU889195A2 |
| Способ управления асинхронным двигателем с фазным ротором | 1989 |
|
SU1723652A1 |
| Частотно-регулируемый электроприводС эКСКАВАТОРНОй ХАРАКТЕРиСТиКОй | 1978 |
|
SU830625A1 |
| Реверсивный тиристорный преобразователь частоты | 1975 |
|
SU680123A1 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
ч I
чСоставитель И.Ковригина Редактор И Рыбченко Техред В.Кадар Корректор М.Шароши
Заказ 3225/ГО Тираж 783 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
N
k,44N
f 3
С
I
1 II
| Способ гибки труб и устройство для его осуществления | 1979 |
|
SU889195A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
