Изобретение относится к автоматическому управлению трубогибочными станами и станками и может быть использовано на станах гибки труб с пространственной гибкой в двух плоскостях, с одновременной осадкой и нагревом токами высокой частоты для магистральных газопроводов и изготовления отводов, а также в котлостроитель- ной, автомобильной, авиационной и других областях промышленности, где необходима точная гибка труб.
Целью изобретения является повышение точности и расширение технологических и функциональных возможностей системы.
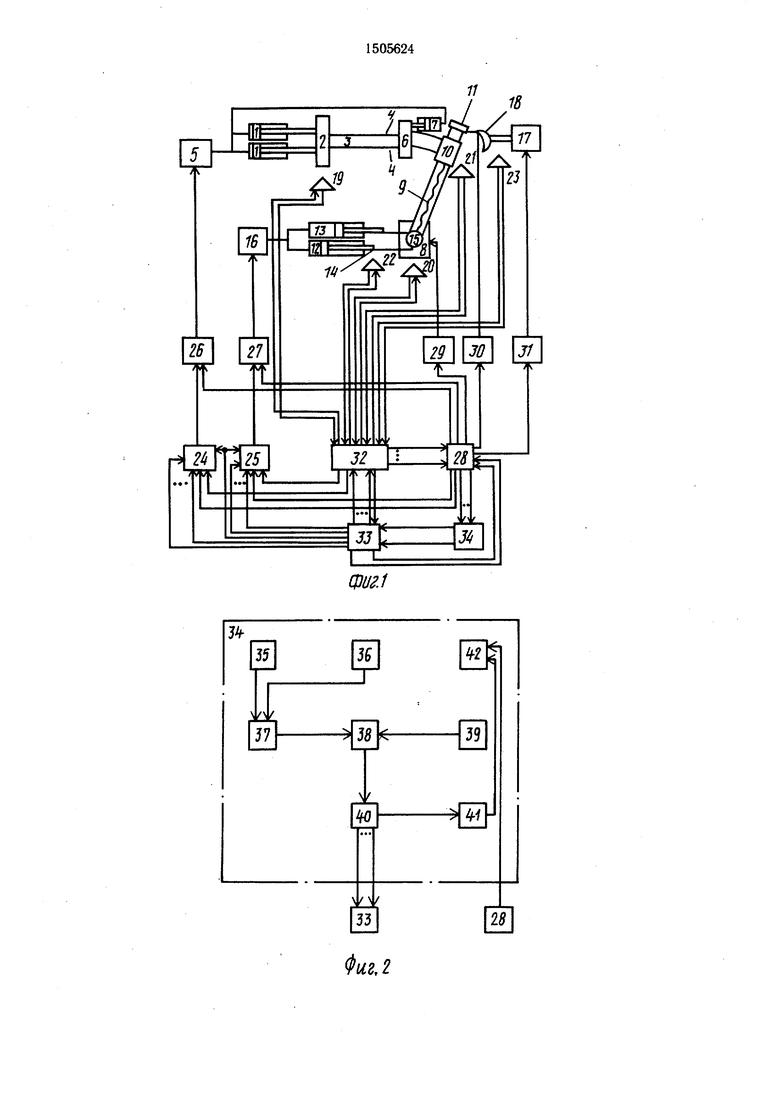
На фиг. 1 изображена структурная схема системы автоматического управления трубогибочным станом; на фиг. 2 - структурная схема пульта управления и индикации; на фиг. 3 - структурная схема блока запоминающих и решающих устройств; на фиг. 4 - структурная схема блока управления; на фиг. 5 - структурная схема блока преобразователей; на фиг. 6 - структурная схема регулятора продольной подачи; на фиг. 7 - структурная схема датчика положения гибочного блока; на фиг. 8 - структурная схема датчика положения головк}1 манипулятора. Трубогибочный стан снабжен механизмом продольной подачи, состоящим из двух цилиндров 1 продольной подачи, траверсы 2 с механизмом 3 зажима трубы, направляющих роликов 4 и насоса 5 продольной подачи; механизмом настройки индуктора 6, состоясд
о
ел
а to
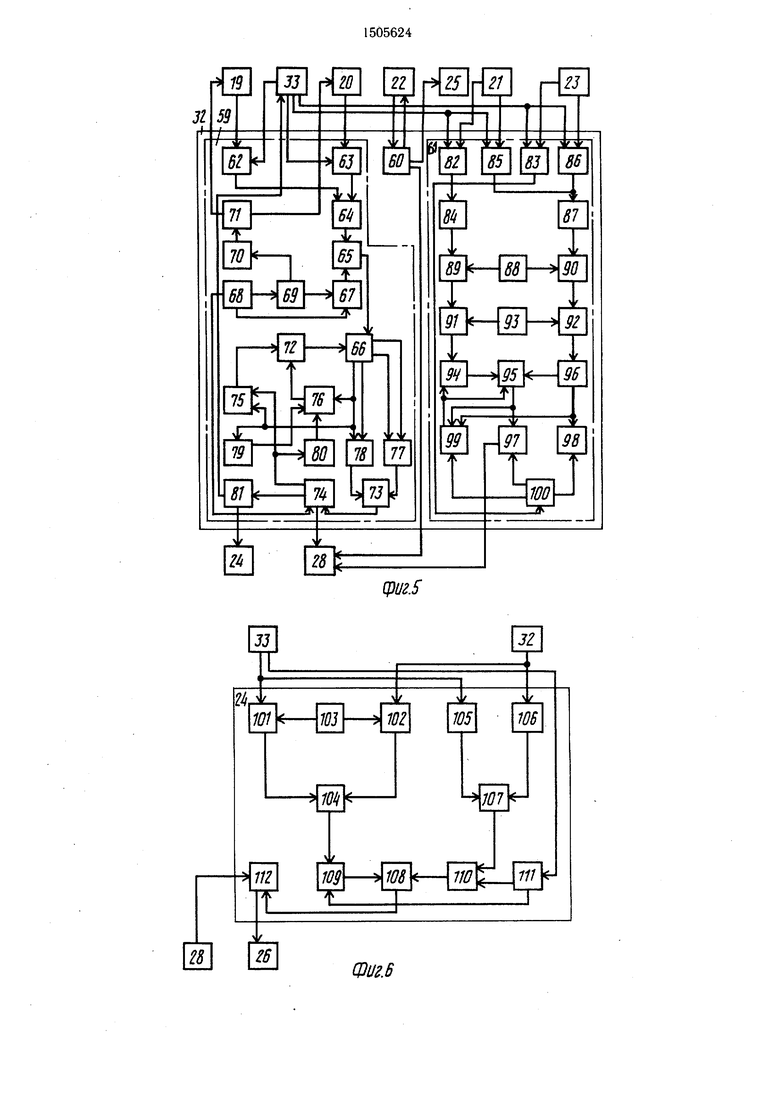
каналов. Первый канал содержит первый 62 и второй 63 ключи, выходы которых через усилитель 64 сигнала датчика связаны с регистром 65, выход которого подключен к сумматору 66, а второй вход - к счетчику-таймеру 67, генератор 68 импульсов, выход которого через делитель 69 частоты связан с формирователем 70 синусоидального напряжения,соединенный с усилителем 71 питающего напряжения, вспомогательный счетчик 72, первую 73, вторую 74, третью 75 и четвертую 76 схемы совпадения И-НЕ, первый 77, второй 78, третий 79 и четвертый 80 элементы ИЛИ-НЕ и частотомер 81. Конструктивно второй канал аналогичен первому ложения головки манипулятора (ДПГМ). 15 каналу.
Третий канал содержит третий 82, четРегулирующие воздействия формируются вертый 83 ключи, выходы которых соедине- с помощью регулятора 24 скорости продольной подачи и регулятора 25 отношения ско1гл;-,1 и-, iu-i.iHii;i,n,i 7 индукгора; гибочным (V. ioKoM., ooCTosinuiv и: по.пзуна 8, водила 9, i ,i6()4i:(iii o. iOBKH 10 с механизмом 11 при- no,i,. i (x ).i i. uiо ruiiiTa); механизмом тормо- ж(Ч1|;:, состоящим из тормозного 12 и под- иори Я 13 -1,:|иидров, сосдиненных цепью 1-4, 1;1крс ;.,1011ной на звездочке 15 водила, и на- гос; К) торможения; манипулятором 17, состоящим из механизма 18 поворота головки манипулятора.
стане установлены датчик 19 продольной подачи (ДПП), датчик 20 положения гибочного блока (ДПГБ), датчик 21 положения гибочной головки (ДПГГ), датчик 22 поворота водила (ДПВ) и датчик 23 по10
ростеи, управляющих электроприводами мены с формирователем 84 сигнала грубого отсчета, пятый 85 и шестой 86 ключи, выхо, , . .ды которых соединены с формирователем 87
ханизма продольной подачи 26 и механизма 20 сигнала точного отсчета, формирователь 88 поворота водила 27. Кроме того, система ав- опорного напряжения, выходы которого через триггеры грубого отсчета 89 и точного отсчета 90 связаны с ключами грубого
отсчета 91 и точного отсчета 92, генератоматического управления станом содержит блок 28 управления, управляющего электроприводом 29 гибочного блока, электроприводом 30 гибочной головки, электропри- 25 тор 93 импульсов, схему ИЛИ 94, счетчики водом 31 головки манипулятора и элек- грубого 95 и точного 96 отсчетов, регист- троприводом механизмов продольной юдачи ры грубого 97 и точного 98 отсчетов, схе- и поворота водила, блок 32 преобразова- му 99 согласования отсчетов и схему 100
телей, блок 33 запоминающих и решающих устройств и пульт 34 управления и индикации.
Пульт управления и индикации (фиг. 2) содержит блок 35 переключателей режимов и блок 36 переключателей задатчиков, выходы которых подключены к коммутатору 37, соединенному с вентилем 38, другой вход коуправления измерением.
30 Регулятор скорости продольной подачи (фиг. 6) и конструктивно аналогичный ему регулятор отношения скоростей состоят из управляемых делителей заданной 101 и текущей 102 частот, связанных с задатчиком 103 постоянной времени интегрирования и реверторого связан с генератором 39 импульсов, а 35 сивным счетчиком 104, преобразователей выход - со счетчиком 40, один из выходов заданной 105 и текущей 106 частот, связанных с устройством 107 вычитания, сумматора 108, входы которого подключены к
которого через дешифратор 41 связан с блоком 42 индикации. Выходы счетчика 40 соединены с блоком 33 запоминающих и ре- шаюпхих устройств, а блок индикаторов - с дл усилителю 110 пропорциональной составляю- блоком 28 управления.щей, связанной с задатчиком 111 коэффиБлок запоминающих и решающих уст- циента усиления, и усилителя 112 мощности, ройств (фиг. 3) содержит оперативно-запоминающее устройство 43, выходы которогоДатчик положения гибочного блока подключены к дешифратору 44 режимов и (фиг. 7) и аналогично ему выполненный преобразователю 45 код - частота, управ- 45 датчик продольной подачи и поворота боди- ляемое множительно-делительное устройство 46, выход которого связан со схемой 47 сравнения, и постоянно-запоминающее устройство 48, выход которого подключен на вход преобразователя код-частота.
Блок управления (фиг. 4) включает 50 но друг друга на четверть шага четырех- первый 49, второй 50 и третий 51 счетчики, заходной резьбы. Выходные концы этих обмоток выведены на схему 115 измерения, выход которой подключен к блоку 32 преобразователей. Стержень охвачен втулкой 116, на внутренней поверхности которой нарезана такая же четырехзаходная резьба с шагом К, в пазы которой через паз уложены два проводника 117, соединенные между собой на одном конце втулки, а втоцифроаналоговому преобразователю 109 и
ла состоят из стержня 113 и нарезанной на его поверхности четырехзаходной резьбой с шагом К, в пазы которой уложено четыре проводника 114, образующие две бифилярные обмотки, сдвинутые относительвыходы которых через первую 52, вторую 53, третью 54 схемы определения разности соединены соответственно с первой 55, второй 56 и третьей 57 схемами сравнения, а вторые выходь их - со схемой 58 управления.
Блок преобразователей (фиг. 5) состоит 1,ч первого 59, второго 60 и третьего 61
55
сигнала точного отсчета, формирователь 88 опорного напряжения, выходы которого через триггеры грубого отсчета 89 и точного отсчета 90 связаны с ключами грубого
отсчета 91 и точного отсчета 92, генератор 93 импульсов, схему ИЛИ 94, счетчики грубого 95 и точного 96 отсчетов, регист- ры грубого 97 и точного 98 отсчетов, схе- му 99 согласования отсчетов и схему 100
правления измерением.
Регулятор скорости продольной подачи (фиг. 6) и конструктивно аналогичный ему регулятор отношения скоростей состоят из управляемых делителей заданной 101 и текущей 102 частот, связанных с задатчиком 103 постоянной времени интегрирования и реверсивным счетчиком 104, преобразователей заданной 105 и текущей 106 частот, связанных с устройством 107 вычитания, сумматора 108, входы которого подключены к
усилителю 110 пропорциональной составляю- щей, связанной с задатчиком 111 коэффицифроаналоговому преобразователю 109 и
циента усиления, и усилителя 112 мощности, Датчик положения гибочного блока (фиг. 7) и аналогично ему выполненный датчик продольной подачи и поворота боди-
но друг друга на четверть шага четырех- заходной резьбы. Выходные концы этих обмоток выведены на схему 115 измерения, выход которой подключен к блоку 32 преобразователей. Стержень охвачен втулкой 116, на внутренней поверхности которой нарезана такая же четырехзаходная резьба с шагом К, в пазы которой через паз уложены два проводника 117, соединенные между собой на одном конце втулки, а втола состоят из стержня 113 и нарезанной на его поверхности четырехзаходной резьбой с шагом К, в пазы которой уложено четыре проводника 114, образующие две бифилярные обмотки, сдвинутые относительрая пара концов подключена к блоку преобразователей.
Датчик положения головки манипулятора (фиг. 8) и конструктивно-аналогичный ему датчик положения гибочной головки состоят из редуктора 118 точного отсчета, входной вал которого связан с объектом измерения, а выходной - с вращающимся трансформатором 119 точного отсчета и редуктором 120 грубого отсчета, на выходном валу которого насажен вращающийся трансформатор 121 грубого отсчета. Выход трансформатора точного отсчета связан со схемой 122 измерения точного отсчета, а трансформатор грубого отсчета - со схемой 123 измерения грубого отсчета.
Система автоматического управления трубогибочным станом работает следующим образом.
Система автоматического управления трубогибочным станом, предназначенным для гибки стальных труб диаметром до 1420 мм в разных плоскостях и местным нагревом в зоне гибки токами высокой частоты и с одновременной осадкой на участке гиба,осуществляет контроль положения перенастраиваемых механизмов и их автоматическую установку в заданные положения, а также контроль текущих значений технологических параметров гиба и автоматическое поддержание их на заданном уровне.
С помощью системы осуществляют контроль положения гибочного блока (ползуна) относительно оси стана и автоматическую установку блока в заданное положение, контроль положения гибочной головки относительно оси стана и автоматическую установку ее в нулевое положение, контроль перемещения трубы на прямых участках перед гибом и автоматический останов трубы после отработки заданного перемещения (прямого участка трубы), контроль углового положения головки манипулятора и автоматическую установку ее в положение задания, контроль и автоматическую стабилизацию скорости подачи трубы в процессе гиба, контроль и автоматическую стабилизацию поворота водила в процессе гиба, контроль угла поворота водила и автоматическую .остановку процесса гиба после достижения водилом заданного угла.
Измерение основных технологических параметров осуществляется датчиками: положения гибочного блока 20, положения головки манипулятора 23, продольной подачи 19 и поворота водила 22, положения гибочной головки 21.
Вторичная обработка выходных сигналов датчиков производится аппаратно с помощью блока 32 преобразователей, имеющего три канала преобразования: канал обработки сигналов датчиков продольной подачи и положения гибочного блока, канал обработки сигнала датчика поворота водила
и канал обработки сигналов датчиков положения гибочной головки и положения головки манипулятора. Выходные сигналы, несущие информацию о текущих значениях параметров гибки,с блока преобразователей поступают в блок управления и блок запоминающих и решающих устройств, на регуляторы скорости продольной подачи и отношения скоростей и после соответствующего преобразования поступают на семисег0 ментные индикаторы пульта 34 управления и индикации.
Через пульт управления и индикации осуществляется диалоговое взаимодействие оператора стана с системой автоматичес5 кого управления станом: обеспечиваются ручной ввод в оперативно-запоминающее устройство блока 33 запоминающих и решающих устройств информации с задат- чиков параметров гибки (радиус гиба,длина прямого участка трубы, угол гиба, скорость
0 продольной подачи, коэффициент отнощения скоростей, угол поворота головки манипулятора и знак поворота головки манипулятора), ручное задание операций управления при настройке стана (установка радиуса ги5 ба, установка прямого участка, гибка, установка головки манипулятора) и индикация заданных и текущих технологических параметров гибки.
Система имеет четыре режима работы: «Гибка, «Установка радиуса гиба, «Уста0 новка прямого участка, «Установка угла поворота головки манипулятора. В каждом из режимов работы образуется один или несколько замкнутых контуров регулирования соответственно числу регулируемых параметров. Расчет управляющих воздействий
5 производится в соответствии с выбранным законом регулирования блоком 28 управления и регуляторами скорости продольной подачи 24 и отношения скоростей 25.
Замыкание контуров регулирования, т. е. разрешение выполнения указанных операций, производится при нажатии кнопки «Пуск, расположенной на пульте 34 управления и индиации, и прекращается либо автоматически, либо при нажатии кнопки «Стоп.
В режиме «Установка радиуса гиба после ввода данных в систему управления станом оператор, нажимая кнопку «Пуск, включает механизм линейного перемещения
гибочного блока (ползуна) и механизм перемещения гибочной головки, который удерживает ее в исходном нулевом положении по отношению к оси стана. При этом замыкаются контуры регулирования положения гибочного блока и положения гибочной головки. Положение гибочного блока определяется датчиком 20 положения гибочного блока как расстояние между осью водила 9 и осью стана.
Установка гибочного блока в заданное положение осуществляется по сигналам «Пониженная скорость, «Вперед и «Назад, вырабатываемых блоком 28 управления. Когда разность текущего R. и задан- ного Rs значений радиуса гиба станет меньше некоторой заданной величины Ro, т. е. /Rr-R3/ R.Ro, выдается сигнал «Пониженная скорость, переводящий электропривод 29 ползуна 8 на пониженную скорость. Величина установки о, при которой происходит переход перемещения ползуна с больщой скорости на пониженную, определяется при наладке на объекте и заносится в постоянное запоминающее устройство блока 33 запоминающих и ре- щающих устройств. Сигнал «Назад вырабатывается при условии, если текущее значение раиуса гиба превышает заданное значение , а сигнал «Вперед - если R.R3- При вырабатывается сигнал «Стоп, по которому прекращается перемещение ползуна.
Аналогично происходит установка гибочной головки, только при этом заданной величиной является положение гибочного блока, а текущее положение гибочной го- ловки определяется датчиком 21 положения гибочной головки как расстояние между осью водила и осью головки.
После установки гибочного блока и гибочной головки в исходное для работы положение оператор переводит систему в режим «Установка прямого участка. При этом в схему управления стана выдается команда на включение привода холостого хода продольной подачи (не показан). Перемещение трубы контролируется датчиком 19 продольной подачи, жестко связанным с траверсой 2 механизма перемещения трубы. Текущее значение величины перемещения трубы L-, сравнивается в блоке 28 управления с заданным значением длины участка тру бы Lf. Если разность текущей длины участ- ка Li и заданной La меньще величины уставки AL|, т.е. {/..f-Lj);ALi, блоком управления вырабатывается сигнал «Основная скорость, который включает электропривод 26 продольной подачи и отключает электропривод холос- того хода. При tLp-Ц1 йдЬ., выдается сигнал «Пониженная скорость, переводящий электропривод 26 на пониженную скорость. При I Lr-L3)lAL2 сигналы «Основная скорость и «Пониженная скорость снимаются, труба останавливается.
Величины ALi и ALa определяются при наладке на объекте и записываются в постоянное запоминающее устройство блока 33 запоминающих и рещающих устройств.
После отработки длины прямого участка труба зажимается в гибочной головке, а оператор переводит систему в режим «Гибка.
0
5
5
0 5 0 5 0
5
В режиме «Гибка после ввода заданных значений параметров (скорость продольной подачи Viie , коэффициент отношения скоростей Ксз, угол гиба аа) и нажатия кнопки «Пуск замыкаются контуры устаиов- ки угла гиба и индуктора. При этом включаются установка токов высокой частоты (не показано) и электропривод 26 механизма продольной подачи. Поскольку цилиндр 7 индуктора 6 и цилиндры 1 продольной подачи включены в общую магистраль насоса 5 продольной подачи, первым начнет перемещение индуктор за счет того, что усилие, создаваемое цилиндром для перемещения индуктора, значительно меньше усилия, создаваемого цилиндрами для перемещения трубы. После того, как индуктор дойдет до упора (не показан), давление в Магистрали цилиндров продольной подачи резко возрастает и предварительно нагретая до заданной температуры труба придет в движение, скорость перемещения которой контролируется датчиком 19 продольной подачи.
При достижении скорости перемещения трубы одной четверти заданной скорости
продольной подачи блок 33 запоминающих и решающих устройств вырабатывает сигнал, который замыкает контур регулирования скорости продольной подачи и контур регулирования скорости механизма торможения, состоящего из тормозного 12 и подпорного 13 цилиндров. Тормозной цилиндр создает усилие осадки трубы в зоне нагрева, а подпорный помогает цилиндрам продольной подачи гнуть трубу.
Контроль скорости перемещения тормозного механизма (штока тормозного цилиндра) осуществляется датчиком 22 поворота водила, жестко связанного с цепью 14, охватывающей звездочку 15, закрепленную на оси водила.
Регулирование скорости продольной подачи и скорости тормозного механизма (поворота водила) осуществляется регуляторами скорости продольной подачи 24 и отношения скоростей 25.
В процессе гибки трубы без осадки стабилизация скорости продольной подачи трубы осуществляется регулятором 24 скорости продольной подачи, который в зависимости от величины рассогласования заданной скорости Van 3, формируемой блоком 33 запоминающих и рещающих устройств, и текущей скорости Vnnr. подаваемой на вход регулятора с блока 32 преобразователей, вырабатывает сигнал управляющего воздействия на электропривод 26 механизма продольной подачи в соответствии с пропорционально - интегральным законом регулирования
,Кг,(иг-и)+КЛй+Ь),(1)
« л к
где Уупр - сигнал управляющего воздействия;
Кп, Kv - коэффициенты усиления соответ- 5 ственно пропорциональной и интегральной составляющих; f/3, Uoc -напряжения, пропорциональные соответственно заданному и текущему значениям скорости про- д дольной подачи;
/С - коэффициент регулирования постоянной времени интегрирования;/3, foe - сигналы, частота которых проf f If Кз
3-/««зЛсЗ ,
А
(3)
где/втз - частота, пропорциональная заданной скорости продольной подачи;
Ксз - заданный коэффициент отношения скоростей продольной подачи и поворота водила; - радиус звездочки; - заданный радиус гиба. Заданная частота /з, пропорциональная заданной скорости поворота водила, формируется управляемым множительно-делитель- ным устройством блока 33 запоминающих и
, .. - . рещающих устройств и подается на один из
порциональна заданному и теку- входов регулятора 25 отнощения скоростей, щему значениям скорости про- на другой вход которого поступает сигнал
обратной связи /, пропорциональный текущей скорости поворота водила с блока 32 преобразователей.
Управляющий сигнал с регулятора отнощения скоростей подается на вход тирис- торного преобразователя электропривода механизма поворота водила, идентичного с электроприводом механизма продольной подачи. Электропривод механизма поворота
дольной подачи.
Регулятор скорости продольной подачи формирует сигнал управляющего воздействия в аналоговой форме напряжением 20 О-10 В, который подается на вход тирис- торного агрегата типа ТЕ4-180/23ОН- 2УХЛ4, управляющего электродвигателем постоянного тока привода механизма продольной подачи.
В процессе гибки трубы с осадкой 25 водила поддерживает скорость поворота во- одновременно находятся в работе и регуля- дила во время гибки трубы с осадкой в тор скорости продольной подачи, и регуля- соответствии с заданным коэффициентом Ксз тор отношения скоростей, аналогичный регулятору скорости продольной подачи. Регулятор отнощения скоростей вырабатывает управляющее воздействие на электропривод 27 механизма поворота водила (тормозного механизма) в соответствии с законом регулирования, выраженного формулой
отношения скоростей.
Одновременно с замыканием контуров регулирования скорости продольной подачи и отношения скоростей со схемы измерения датчика 22 поворота водила последовательность импульсов, количество которых пропорционально углу поворота водила алг, поступает на блок 32 преобразователей, а с блока преобразователей - на вход блока 28 управления. При достижении .з блок управления вырабатывает сигнал , по которому схема управления блока управления выдает команду на отключение элекU,K.()(b-,(2)
где L/ynp - сигнал управляющего воздействия;Кп, К - коэффициенты усиления соответ35
Одновременно с замыканием контуров регулирования скорости продольной подачи и отношения скоростей со схемы измерения датчика 22 поворота водила последовательность импульсов, количество которых пропорционально углу поворота водила алг, поступает на блок 32 преобразователей, а с блока преобразователей - на вход блока 28 управления. При достижении .з блок управления вырабатывает сигнал , по которому схема управления блока управления выдает команду на отключение элекственно пропорциональной и инте- 40 троприводов продольной подачи и механиз- гральной составляющих;ма поворота водила, а также установку
нагрева трубы токами высокой частоты и захватов гибочной головки, т. е. гибка прекращается.
i/3, Ut - напряжения, пропорциональные соответственно заданному и текущему значениям скоростей поворота водила (тормозного механизма) ;
3, fi - сигналы, частота которых пропорциональна заданному и текущему значениям скоростей поворота водила (тормозного механизма).
Поскольку задающим параметром является коэффициент отношения скорости продольной подачи к скорости поворота
водила (, то для рещения уравне- Ка
ния, выраженного формулой (2), заданный параметр частоты /з, пропорциональной скорости поворота водила, находят из выражения
Если заданное количество участков трубы , то начинается следующий цикл работы системы, аналогичный указанному. Отработка программы прекращается при достижении действительного числа участков
гд гибки заданного значения . Гибка трубы с равномерным радиусом гиба, а не по участкам, есть частный случай гибки при и . Гибка трубы в другой плоскости осуществляется с помощью манипулятора, предназначенного для уборки готовых отво55 Дов после гибки и разворота трубы для получения нескольких гибов в другой плоскости.
В режиме «Установка угла поворота трубы оператор подводит манипулятор к
f f If Кз
3-/««зЛсЗ ,
А
(3)
где/втз - частота, пропорциональная заданной скорости продольной подачи;
Ксз - заданный коэффициент отношения скоростей продольной подачи и поворота водила; - радиус звездочки; - заданный радиус гиба. Заданная частота /з, пропорциональная заданной скорости поворота водила, формируется управляемым множительно-делитель- ным устройством блока 33 запоминающих и
рещающих устройств и подается на один из
5 водила поддерживает скорость поворота во- дила во время гибки трубы с осадкой в соответствии с заданным коэффициентом Ксз
5
отношения скоростей.
Одновременно с замыканием контуров регулирования скорости продольной подачи и отношения скоростей со схемы измерения датчика 22 поворота водила последовательность импульсов, количество которых пропорционально углу поворота водила алг, поступает на блок 32 преобразователей, а с блока преобразователей - на вход блока 28 управления. При достижении .з блок управления вырабатывает сигнал , по которому схема управления блока управления выдает команду на отключение элекЕсли заданное количество участков трубы , то начинается следующий цикл работы системы, аналогичный указанному. Отработка программы прекращается при достижении действительного числа участков
гибки заданного значения . Гибка трубы с равномерным радиусом гиба, а не по участкам, есть частный случай гибки при и . Гибка трубы в другой плоскости осуществляется с помощью манипулятора, предназначенного для уборки готовых отвоДов после гибки и разворота трубы для получения нескольких гибов в другой плоскости.
В режиме «Установка угла поворота трубы оператор подводит манипулятор к
:гибочной головке стана. Труба зажимается клещевой головкой манипулятора. После :нажатия кнопки «Пуск с помощью датчи- |ка 23 положения головки манипулятора 1фиксируется угловое положение головки. Если угол поворота головки манипулятора не равен нулю, система автоматически отрабатывает это рассогласование, а блоком 28 управления при нулевом рассогласовании выдается команда на отключение
с задатчиков режимов работы стана. «Гибка, «Установка радиуса гиба, «Установка прямого участка, «Установка угла поворота головки манипулятора, «Ручной ре- 5 жим /Автоматический режим, «Работа/ Контроль, «Пуск/Стоп.
Сигналы, несущие информацию о коэффициентах Кя и /Си соответственно пропор- ,...v4.uc...,.,. ..„......,... циональной и интегральной составляющих, с
I электропривода 31 головки манипулятора и в преобразователя код-частота подаются на
I схему управления стана на электропривод входы регуляторов скорости продольной поI (не показан) направляющих роликов, котоI рый освобождает трубу, зажатую ими.
После задания параметров разворота
трубы (угол поворота головки манипуля- 15 поступает частота задающего сигнала /„„з- тора а„з и знак поворота «Вправо, Задаваемый параметр частоты, пропор- «Влево) и повторного нажатия кнопки
I «Пуск система начинает отрабатывать заI данный угол разворота трубы. При этом на
I один из входов блока 28 управления с
1 блока 32 преобразователей подается сигнал
I текущего значения угла поворота головки
I манипулятора а„г, а на другой вход - сигI нал заданного значения а„аС блока 33 запоI минающих и рещающих устройств. Этот режим аналогичен режиму установки радиуса 25 нальной текущей скорости продольной погиба с той разницей, что угол поворота
20
дачи 24 и отнощения скоростей 25. Кроме того, с преобразователя 45 код-частота на регулятор 24 скорости продольной подачи
циональный скорости поворота водила /з, для регулятора 25 отнощения скоростей формируется управляемы.м множительно- делительным устройством 46 согласно формулы (3). Кроме того, в множительно-дели- тельном устройстве заданная частота f после деления на четыре подается на один из входов схемы 47 сравнения, где сравнивается со значением частоты , пропорцио1 головки манипулятора может принимать как дачи Voov При условии, если 1 /,
U.3
а
I положительное, так и отрицательное значеi ния, соответственно, блок управления вмес- схема 47 сравнения снимает блокировку с I то двух команд выдает на электропривод выходов регуляторов скорости продольной I головки манипулятора три команды: «Пово- 30 подачи 24 и отношения скоростей 25, в свя- 1 рот вправо -Ьа, «Поворот влево -а„ и зи с чем происходит замыкание контуров i «Пониженная скорость.регулирования скорости продольной подачи и
I После отработки заданного угла раз- скорости механизма поворота водила. ворота трубы блок управления выдает ко-Сигналы, несущие информацию о коэффиi манду на отключение электропривода го- циентах Ro, AL|, ALa, после соответствую- ; ловки манипулятора и в схему управления 35 щего преобразования поступают в блок 28 ; станом, по которой труба зажимается в на- управления. I правляющих роликах и гибочной головке, а манипулятор возвращается в исходное состояние. После этого цикл гибки трубы повторяется.
С помощью пульта угфавления и индикации (фиг. 2) осуществляется ручной ввод технологических параметров гибки и режимов работы системы, а также индикация заданных и текущих параметров гибки.
Блок запоминающих и решающих устройств (фиг. 3) организует обмен данными и управляющ ими сигналами между пультом 34 управления и индикации и регуляторами скорости продольной подачи 24 и
Блок 28 управления (фиг. 4) предназначен для выполнения операций перенастрой40 ки стана. В зависимости от режима работы стана на входы первого 49, второго 50 и третьего 51 счетчиков с блока 32 преобразователей подаются текущие значения измеряемых параметров: на первый счетчик 49 - текущее значение радиуса гиба R.,
45 на второй счетчик 50 - текущее значение длины участка Lr, на третий счетчик 51 - текущие значения угла поворота водила о(вг и угла поворота головки манипулятора- «кг, а на входы первой 52, второй 53 и третьей 54 схем определения разности - заданотношения скоростей 25, а также с блоком 50 ные значения этих параметров с блока 33 32 преобразователей и блоком 28 управ- запоминающих и рещающих устройств, лення. Устройство запоминающих и решающих устройств обеспечивает ввод четырехразрядных десятичных чисел, представляеПервая схема 52 определения разности формирует код модуля разности текущего значения, радиуса гиба и заданного Д/ мых в двоично-десятичном коде с задатчи- , вторая схема 53 определения разков .радиуса гиба, длины прямого участ- кости - код модуля разности текущего значения длины участка и заданного AL 1 , третья схема 57 определения разности -
ка, угла гиба, скорости продольной подачи, угла поворота головки манипулятора и коэффициента отнощения скоростей, а также
код модуля разности текущего значения
с задатчиков режимов работы стана. «Гибка, «Установка радиуса гиба, «Установка прямого участка, «Установка угла поворота головки манипулятора, «Ручной ре- жим /Автоматический режим, «Работа/ Контроль, «Пуск/Стоп.
входы регуляторов скорости продольной попоступает частота задающего сигнала /„„з- Задаваемый параметр частоты, пропор-
дачи 24 и отнощения скоростей 25. Кроме того, с преобразователя 45 код-частота на регулятор 24 скорости продольной подачи
поступает частота задающего сигнала /„„з- Задаваемый параметр частоты, пропор-
нальной текущей скорости продольной по
циональный скорости поворота водила /з, для регулятора 25 отнощения скоростей формируется управляемы.м множительно- делительным устройством 46 согласно формулы (3). Кроме того, в множительно-дели- тельном устройстве заданная частота f после деления на четыре подается на один из входов схемы 47 сравнения, где сравнивается со значением частоты , пропорциоциентах Ro, AL|, ALa, после соответствую- щего преобразования поступают в блок 28 управления.
Блок 28 управления (фиг. 4) предназначен для выполнения операций перенастройки стана. В зависимости от режима работы стана на входы первого 49, второго 50 и третьего 51 счетчиков с блока 32 преобразователей подаются текущие значения измеряемых параметров: на первый счетчик 49 - текущее значение радиуса гиба R.,
на второй счетчик 50 - текущее значение длины участка Lr, на третий счетчик 51 - текущие значения угла поворота водила о(вг и угла поворота головки манипулятора- «кг, а на входы первой 52, второй 53 и третьей 54 схем определения разности - заданные значения этих параметров с блока 33 запоминающих и рещающих устройств,
код модуля разности текущего значения
угла поворота головки цанипулятора и заданного Aci,,{a«T-амз
Код АУ обрабатывается первой схемой 55 сравнения, которая выдает сигналы при достижении &, и (Р„ - задавае- мая при настройке уставка перехода электропривода гибочного блока на пониженную скорость). Кроме того, в первой схеме сравнения сравнивается текущее значение радиуса гиба т с заданным и fiRcRo, а также формируется знак рассогласования текущего и заданного значений радиуса гиба «Знак. Если , этой схемой формируется сигнал «Пониженная скорость, если , - сигнал «Вперед, если , - сигнал «Назад, а при - сигнал «Стоп.
По этим сигналам схемой 58 управления вырабатываются соответствующие релейные команды, управляющие электропри- бодом гибочного блока. Команда управления электроприводом гибочной головки формируется аналогично командам управления гибочным блоком.
Модуль разности текущего перемещения трубы LT и заданного La вычисляется второй схемой 53 определения разности и сравни- вается во второй схеме 56 сравнения: при AZ,i fLT-La) схемой сравнения вырабатывается сигнал «Основная скорость, при- AL |LT-Laf - сигнал «Пониженная скорость, при AL2 fLT-Lai - сигнал «Стоп. Установка ALi перехода привода продоль- ной подачи на основную скорость и AL2 конца перемещения определяется при наладке и записывается в постоянно-запоминающее устройство блока запоминающих и решающих устройств. Схема 58 управления по сигналу «Основная скорость формирует команду на включение электропривода 26 насоса продольной подачи и отключение электропривода холостого хода (не показан). По сигналу «Пониженная скорость схема управления формирует команду, переводящую электропривод механизма продольной подачи на пониженную скорость. По сигналу «Стоп команды «Основная скорость и «Пониженная скорость снимаются, труба останавливается.
Разность текущего значения угла пово- рота водила освт и заданного авз вычисляется третьей схемой 54 определения разности. При АлС,0 третьей схемой 57 сравнения вырабатывается сигнал «Стоп, по которому схема 58 управления формирует сигал управляющего воздействия на отключение элек- троприводов механизма продольной подачи 26 и механизма поворота водила 27.
В режиме установки угла поворота трубы головкой манипулятора при приходе команды «Пуск (первое нажатие кнопки «Пуск на пульте управления и индикации) с блока запоминающих и рещающих устройств третьей схемой 57 сравнения сравнивается текущее значение положения
головки манипулятора амт. При схемой 58 управления формируется команда на включение электропривода головки манипулятора. При достижении угла поворота головки манипулятра схема 57 сравнения нарабатывает сигнал «Стоп, по которому схемой 58 управления отключается электропривод головки манипулятора. При приходе второго импульса (повторное нажатие кнопки «Пуск) и знака поворота головки манипулятора «Вправо, «Влево с блока запоминающих и решающих устройств третья схема 54 определения разности вычисляет модуль разности текущего значения угла поворота головки манипулятора и заданного амз:Аам амт-амз|. Дальнейшая обработка сигналов аналогична обработке сигналов установки радиуса гиба с той лишь разницей, что третьЯ схема 57 сравнения формирует три сигнала: «Поворот вправо -+-ам, «Поворот влево - ам и «Пониженная скорость, по которым схемой 58 управления формируются команды, управляющие электроприводом головки манипулятора.
Выходные значения текущих значений измеряемых параметров RT, LT, апт. амт, формируемые первым 49, вторым 50 и третьим 51 счетчиками, поступают также на входы индикаторов пульта управления и индикации.
Блок 32 преобразователей (фиг. 5) выполняет функции преобразования сигналов датчиков в частоту или код, пропорциональных измеряемым технологическим параметрам. Он содержит три канала преобразования: первый канал 59 преобразования выходных сигналов датчиков продольной подачи 19 и положения гибочного блока 20; второй канал 60 преобразования выходного сигнала датчика 22 поворота водила и третий канал 61 преобразования выходных сигналов датчиков положения гибочной головки 21 и положения головки манипулятора 23.
Первый канал 59 и аналогичный ему второй канал 60 работают следующим образом.
Импульсы прямоугольной формы, поступающие на вход формирователя 70 синусоидального напряжения с делителя 69 частоты, преобразуются в синусоидальное напряжение, которое служит для питания датчиков. При подаче в обмотки возбуждения датчиков питающего напряжения на выходе их появятся сигналы в виде последовательности импульсов, несущих информацию о фазовом сдвиге между периодом То питающего напряжения и периодами Т,- - выходного сигнала датчиков. В зависимости от того, на какой из ключей 62 или 63 подан разрещающий импульс, формируемый блоком 33 запоминающих и решающих устройств, последовательность импульсов с датчика 19 продольной подачи или с датчика 20 положения гибочного блока поступает чбрез открытый ключ 62 или 63 через усилитель 64 сигнала датчика на вход регистра 6. По переднему фронту этих импульсов происходит запись «-разрядного кода со снетчика-таймера 67 в регистр 65. I Счетчик-таймер представляет собой двоичный rt-разрядный счетчик, работающий в циклическом режиме. С приходом с делителя 69 частоты тактирующего импульса, длительность которого равна периоду То гитающего напряжения, на выходе счетчи- на-таймера вырабатывается код, формируе- л:ый импульсами, поступающими на счет- t ый вход счетчика-таймера с генератора (8 импульсов. Информация с выхода счет- 1ика-таймера в параллельном коде записы- Е ается в триггеры регистра 65 в течение Еремени, равного периоду Т, частоты виход- гого сигнала датчика. Код на выходе регистра является временным аналогом кодо- юй маски положения подвижной втулки датчика (фиг. 7), жестко связанной с объек- ом измерения перемещения (скорости), относительно неподвижного стержня. Значение кода в регистре 65 изменяется с при- содом каждого следующего импульса с вы- сода датчика и подачей нового кода со счет- 1ика-таймера. При перемещении втулки хлительность импульсов выходного сигнала датчика изменяется: с увеличением .цительности импульсов значение кода ре- истра увеличивается, а при уменьщении длительности импульсов уменьшается. При |5авенстве периодов То питающего напря- жения и Т; напряжения выходного сигнала Датчика (втулка неподвижна) в регистр Записывается один и тот же код. В момент |перемещения втулки относительно стержня |с приходом импульса измеряемого сигнала ;между регистром и вспомогательным счет- :чиком 72 устанавливается равновесие записанных в них кодов. Содержимое регистра в четырехразрядном параллельном коде поступает на вход сумматора 66, на второй вход которого поступает проинвентирован- ный четырехразрядный код с выхода вспомогательного счетчика. Поскольку эти коды по модулю равны, то суммарное значение их на выходе сумматора равно «О, т.е. на выходе сумматора во всех его разрядах - «О, соответственно, и на входе второй схемы 74 совпадения И-НЕ - нулевой уровень, блокирующий прохождение импульсов с генератора 68 импульсов на вход вспомогательного счетчика 72.
С приходом следующего импульса измеряемого сигнала и в зависимости от направления перемещения втулки относительно стержня в регистр 65 запишется больший (меньший) код. При превышении (уменьщении) кода регистра код вспомогательного счетчика на выходе сумматора 66 в
старшем разряде - соответственно «О или «1. При наличии на выходе старшего разряда сумматора «1 на выходе второго элемента ИЛИ-НЕ 78 - «О,
соответственно, на выходе первой схемы И-НЕ 73 - «1, при этом через открытый ключ второй схемы И-НЕ совпадения на входы частотомера 81, четвертого элемента ИЛИ-НЕ 80 и третьей схемы 75 И-НЕ совпадения поступает последовательность импульсов через открытый ключ с генератора 68 импульсов.
Так как открыт элемент третьей схемы 75 совпадения с выходом на «Вычитание, код вспомогательного счетчика уменьшается
5 до равенства с кодом регистра. При наличии на выходе старщего разряда сумматора «О на выходе третьего элемента ИЛИ-НЕ 79 - «1, которая разрешает прохождение импульсов через элемент четвертой схемы И-НЕ 76 совпадения, с выходом на «Сложение, увеличивая код вспомогательного счетчика до равенства с кодом регистра. Следовательно, в зависимости от того, какой вход схем И-НЕ 75 или 76 совпадения открыт, определяется и знак направ5 ления перемещения втулки относительно стержня датчика. Работа второго канала 60 блока преобразователей аналогична работе первого канала.
Третий канал 61 блока преобразова0 телей работает следующим образом.
Выходные сигналы датчика 21 положения гибочной головки или датчика 23 положения головки манипулятора в зависимости от того, какая пара ключей 82, .85 или 83, 86 открыта, в виде синусоидаль5 ных напряжений Un и (Уго высокой частоты поступают соответственно на формирователи сигнала точного отсчета 87 и сигнала гр убого отсчета 84. Последовательность прямоугольных импульсов подается на входы триггеров точного 90 и грубого 89 отсчетов. На управляющие входы этих триггеров поступает опорный сигнал Упнт, вырабатываемый формирователем 88 опорного напряжения. Величина измеряемого параметра пропорциональна сдвигу фаз выход5 ных сигналов датчика (фиг. 8) UTO и Un отсчетов относительно опорного сигнала Unm. На выходе триггеров образуются импульсы длительностью тю и тто, пропорциональной измеряемому параметру. Эти ямпульсы поступают на входы ключей точного 92 и гру0 бого 95 отсчетов. Коды со счетчиков точного и грубого отсчетов сравниваются в схеме 97 согласования отсчетов, которая по сигналу «+1 со схемы 100 управления измерением вырабатывает импульс прибавления или вычитания единицы из содержимого реверсивного счетчика 95 грубого отсчета. Таким образом, на выходе счетчиков точного и грубого отсчетов образуется код, соответствующий текущему значению
0
5
измеряемого параметра. По сигналу «Запись со схемы 100 управления измерением этот код заносится в регистры точного 98 и грубого 97 отсчетов. По окончании цикла измерения схема управления из- 5 мерением устанавливает в «О счетчики точного и грубого отсчетов.
Регулятор 24 скорости продольной подачи (фиг. 6) и аналогичный ему регулятор 25 отношения скоростей представ- л ляют собой цифроаналоговый пропорционально-интегральный регулятор непрерывного действия, формирующий сигнал управляющего воздействия в соответствии с формулой (I), а регулятор отношения скоростей с формулой (2).15
Соотношение- постоянной времени интегрирования Т«4., коэффициента усиления интегральной составляющей К и коэффициента регулирования постоянной времени интекущего значения частоты . Код Л .
jV
соответствующий интегралу разности вход ных сигналов, поступает на цифроаналоговый преобразователь 109, а после предварительного усиления на величину коэффициента усилия К, который формируется задатчиком 111 коэффициентов усиления, - на один из входов сумматора 108.
Для вычисления пропорциональной составляющей Тп заданная /з и текущая /ос частоты преобразуются преобразователями заданной 105 и текущей 106 частот соответственно в напряжение Us и UK. Эти напряжения подаются на входы устройства 107 вычитания, выполненного на операционном усилителе. Выходной сигнал в виде разности напряжений lJ Uz-U° с устройства вычитания усиливается усилителем 110 пропорциональной составляющей, коэффитегрирования К определяется из выра- j« циент усиления Кч которого формируется
жения
задатчиком 111 коэффициентов усиления. Пропорциональная составляющая складывается с интегральной составляющей в сумматоре 108. Сумма напряжений интегральной Ни и пропорциональной Ил
Ти . Л-и
(4)
задатчиком 111 коэффициентов усиления. Пропорциональная составляющая складывается с интегральной составляющей в сумматоре 108. Сумма напряжений интегральной Ни и пропорциональной Ил
В регуляторе вырабатывается в цифровой форме интегральная составляющая и 25 составляющих преобразуется усилителем суммируется с пропорциональной составляю-112 мощности в сигнал управления U/пр ,
величина которого изменяется в пределах О-10 В. В этот сигнал подается на вход
щей, получаемой в аналоговой форме. Сигнал заданной скорости продольной подачи, значения коэффициентов пропорциональной К и интегральной К« составляющих
тиристорного агрегата, например, типа ТЕЧ-160/230Н-2УХЛЧ, управляемого
тропривода 26 механизма продольной подачи. Таким образом, осуществляется поддержание скорости продольной подачи на заданном уровне.
Датчики продольной подачи, положения
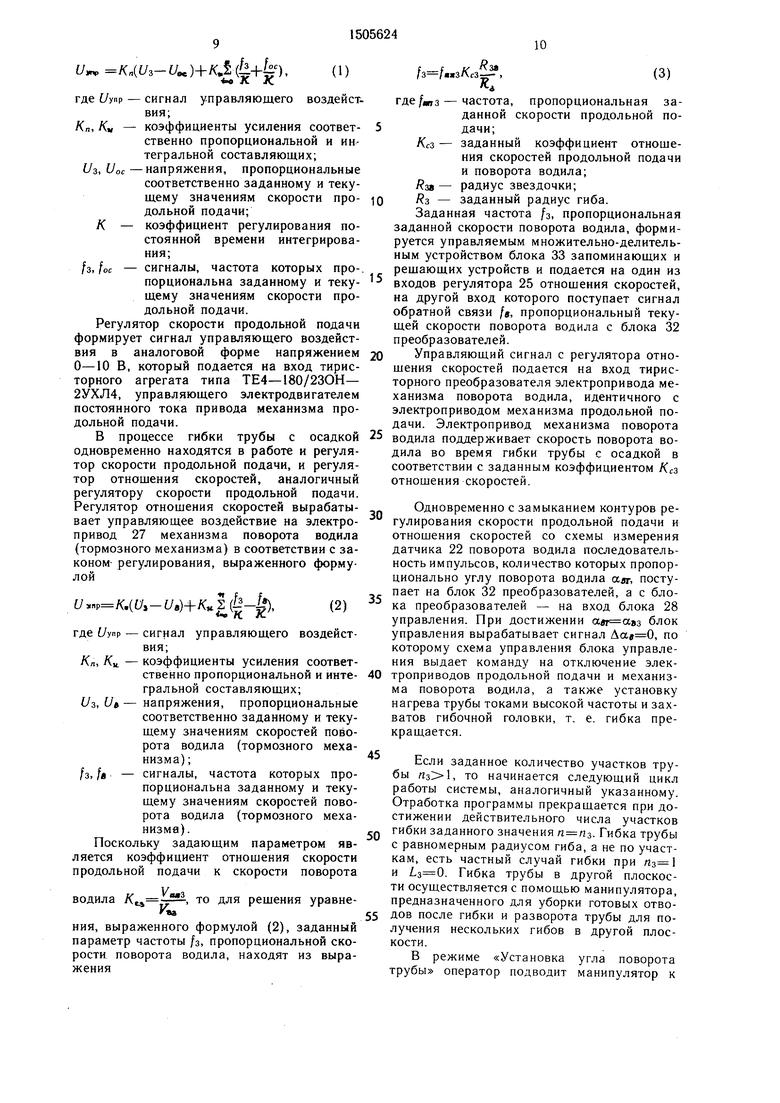
в виде частот, формируемых блоком 33 запо- электродвигателем постоянного тока элек- минающих и рещающих устройств, и сигналы текущего значения скорости продольной подачи с блока 32 преобразователей также в виде частот поступают на входы управляемых делителей заданной 101 и текущей., .. . , 102 частот, преобразователей заданной 105 гибочного блока и поворота водила пред- и текущей 106 частот, а коэффициентов К« ставляют собой фазовые преобразователи и Ки - на входы задатчика 111 коэффици- линейного перемещения в электрический сиг- ентов усиления. Управляемые делители час- нал. Датчик, например, 19 продольной по- тоты служат для регулировки постоянной дачи (фиг. 7) состоит из стержня 113 с времени интегрирования Т,. Они уменьшают 40 нарезанной на его поверхности четырех- входные частоты fi и /ос в соответствии заходной резьбой с шагом А, в пазы которой с коэффициентом усиления К, задаваемым уложено четыре проводника 114, образующие
две бифилярные обмотки, сдвинутые между собой на четверть шага четырехзаходной резьбы. Стержень охвачен втулкой, на внут- 45 ренней поверхности которой нарезана такая же четырехзаходная резьба с шагом X,
с помощью задатчика 103 постоянной времени интегрирования. При этом частоты на выходах управляемых делителей 101 и 102
частоты равны соответственно Л- К
а постоянная времени интегрирования Тн
возрастает в К раз Ти К-Тио,(5)
где Тио - постоянная времени интегрирования при непосредственной подаче частот /3, /ос на реверсивный счетчик.
50
в пазы которой уложены два проводника 117 с сдвигом один относительно другого на половину шага четырехзаходной резьбы, соединенные между собой на одном конце втулки, а выходные концы выведены на схему 115 измерения.
При подаче питания (напряжения высокой частоты) с блока 32 преобразователей в обмотки втулки в обмотках стержПри подаче питания (напряжения высокой частоты) с блока 32 преобразователей в обмотки втулки в обмотках стержИнтегральная составляющая вычисляется в реверсивном счетчике 104, на вход55 наведется ЭДС. Напряжение, снимаемое сложения которого с управляемого делителяс обмоток стержня, несет информацию в 101 заданной частота подается сигналвиде фазового сдвига
екущего значения частоты . Код Л .
jV
соответствующий интегралу разности вход ных сигналов, поступает на цифроаналоговый преобразователь 109, а после предварительного усиления на величину коэффициента усилия К, который формируется задатчиком 111 коэффициентов усиления, - на один из входов сумматора 108.
Для вычисления пропорциональной составляющей Тп заданная /з и текущая /ос частоты преобразуются преобразователями заданной 105 и текущей 106 частот соответственно в напряжение Us и UK. Эти напряжения подаются на входы устройства 107 вычитания, выполненного на операционном усилителе. Выходной сигнал в виде разности напряжений lJ Uz-U° с устройства вычитания усиливается усилителем 110 пропорциональной составляющей, коэффициент усиления Кч которого формируется
циент усиления Кч которого формируется
задатчиком 111 коэффициентов усиления. Пропорциональная составляющая складывается с интегральной составляющей в сумматоре 108. Сумма напряжений интегральной Ни и пропорциональной Ил
составляющих преобразуется усилителем 112 мощности в сигнал управления U/пр ,
тиристорного агрегата, например, типа ТЕЧ-160/230Н-2УХЛЧ, управляемого
электродвигателем постоянного тока элек- ., .. . , гибочного блока и поворота водила пред- ставляют собой фазовые преобразователи линейного перемещения в электрический сиг- нал. Датчик, например, 19 продольной по- дачи (фиг. 7) состоит из стержня 113 с нарезанной на его поверхности четырех- заходной резьбой с шагом А, в пазы которой уложено четыре проводника 114, образующие
тропривода 26 механизма продольной подачи. Таким образом, осуществляется поддержание скорости продольной подачи на заданном уровне.
Датчики продольной подачи, положения
электродвигателем постоянного тока элек- ., .. . , гибочного блока и поворота водила пред- ставляют собой фазовые преобразователи линейного перемещения в электрический сиг- нал. Датчик, например, 19 продольной по- дачи (фиг. 7) состоит из стержня 113 с нарезанной на его поверхности четырех- заходной резьбой с шагом А, в пазы которой уложено четыре проводника 114, образующие
в пазы которой уложены два проводника 117 с сдвигом один относительно другого на половину шага четырехзаходной резьбы, соединенные между собой на одном конце втулки, а выходные концы выведены на схему 115 измерения.
При подаче питания (напряжения высокой частоты) с блока 32 преобразователей в обмотки втулки в обмотках стерж наведется ЭДС. Напряжение, снимаемое с обмоток стержня, несет информацию в виде фазового сдвига


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля раствора валков прокатного стана | 1983 |
|
SU1088832A1 |
| Способ гибки змеевиков и устройство для его осуществления | 1988 |
|
SU1814575A3 |
| Устройство компенсации влияния эксцентриситета прокатных валков на прокатываемую полосу | 1982 |
|
SU1041187A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |
| Устройство для контроля радиуса гиба | 1986 |
|
SU1423220A1 |
| Устройство для управления моталкой сортового стана | 1986 |
|
SU1357199A1 |
| Устройство для управления главнымпРиВОдОМ КлЕТи НЕпРЕРыВНОгО пРОКАТНОгОСТАНА | 1979 |
|
SU806185A2 |
| Устройство для управления главным приводом клети непрерывного прокатного стана | 1978 |
|
SU738707A1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2001 |
|
RU2219586C2 |
| Частотно-управляемый синхронный электропривод | 1983 |
|
SU1112521A1 |


Изобретение относится к машиностроению, а именно к автоматизированным системам управления трубогибочными станками, и может использоваться в котлостроительной, автомобильной, авиационной и других отраслях промышленности. Цель изобретения - повышение точности и расширение технологических и функциональных возможностей. Измерение технологических параметров производится датчиками продольной подачи положения гибочного блока, положения гибочной головки, положения водила, положения головки манипулятора. Измерения обрабатываются блоком преобразователей. Пульт управления и индикации осуществляет диалоговое взаимодействие оператора стана с системой. Обеспечивается ручной ввод в блок запоминающих и решающих устройств заданных параметров гибки. Расчет управляющих воздействий осуществляется в блоке управления и регуляторами скорости продольной подачи и отношения скоростей. Система управления позволяет автоматически осуществлять контроль положения механизмов и установку их в заданное положение в широком диапазоне изменения параметров, с высокой точностью производить гибку труб в двух плоскостях с одновременной осадкой и нагревом токами высокой частоты. 7 з.п.ф-лы, 8 ил.
задания -ф-, а на вход вычитания - сигналф а)о/+.К;
23
(6)
е ср - мгновенная фаза выходного сигнала;
ш„ - круговая частота питающего датчика напряжения;
X - координата перемещения втулки относительно стержня;
А, - щаг четырехзаходной резьбы, в пределах которого составляющая мгновенного значения, зависящая от координаты перемещения, изменяется на 2я.
Система автоматического управления трубогибочным станом с нагревом токами высокой частоты обеспечивает расширение
При перемещении втулки датчика относительно стержня текущая фаза выходного сигнала датчика пропорционально изменяется скорости ее перемещения, соот- 15 диапазона регулирования как скорости про- ветственно, изменяется и частота выход- дольной подачи, так и отношения скорос- ного сигнала. Эта частота подается на тей в режиме работы стана с осадкой, схему 115 измерения датчика, которая вы- обеспечение пространственной гибки труб, рабатывает последовательность импульсов, повыщение точности регулирования и конт- частота которых пропорциональна скорости роля параметров гибки, а следовательно, перемещения втулки (измеряемого объекта) 20 повыщение производительности стана и улуч- относительно стержня. Обработка выходного щение качества готовых изделий. Кроме того, сигнала датчика осуществляется в блоке 32 использование одних и тех же датчиков преобразователей.как для измерения скорости, так и для изДатчик положения гибочной головки и мерения длины и углов повыщает надеж- аналогичный ему датчик положения головки 25 ность и упрощает схему построения системы. манипулятора (фиг. 8) осуществляют преобразование поворота ходового винта гибоч-Создание и внедрение гибочного обору- ной головки (поворота вала редуктора дования с автоматизированным процессом головки манипулятора) в пропорцио- гибки труб позволяет организовать центра- нальный ему сдвиг фазы выходного лизованное производство энергетических тру- сигнала. Вращение ходового винта гибоч- 30 бопроводов в блочном исполнении для тепло- ной головки (выходного вала редуктора вых и атомных электростанций и магист- головки манипулятора) передается на жестко связанный с ним выходной вал редуктора 118 точного отсчета и поворотного трансформатора 119 точного отсчета. Передаточное число поворотного трансформатора 35 точного отсчета выбирается из условия
ральных газопроводов.
Формула изобретения
Ито
-А
С/, «го
J
5
(7)
Л го
фор.матора точного отсчета; 45 гибочного блока, датчик положения го- S - щаг ходового винта.ловки манипулятора, регулятор скорости
продольной подачи, регулятор отношения скоростей, бло.к запоминающих и рещающих устройств, пульт управления и индикации и блок преобразователей, входы которого
50 соединены с Датчиком продольной подачи, датчиком поворота водила, датчиком положения гибочного блока, датчиком положения гибочной головки, датчиком положения головки манипулятора и блоком
сг запоминающих и решающих устройств, а выходы - с датчиком продоЛьн(ж подачи, датчиком поворота водила, датчиком положения гибочного блока, регулятором скорости продольной подачи, регулягде «хв, п то - число оборотов ходового винта и ротора поворотного трансформатора точного отсчета; ахи, ато - углы поворота ходового винта и ротора поворотного трансПередаточное число редуктора 120 грубого отсчета выбирается из условия
L или (Л Го
а,
(8)
где L - наибольшая длина перемещения
гибочной головки; а - наибольщий угол поворота головки
манипулятора.
При запитке поворотных трансформаторов точного и грубого отсчетов напряжением Uo высокой частоты с их выходных обмоток снимается сигнал в виде синусоидальных напряжений и ilfo высокой частоты, фаза которых пропорциональна измеряемому углу поворота. Эти сигналы подаются на схемы измерения точного отсчета 122 и измерения грубого отсчета 123, которыми вырабатывается последовательность импульсов, частота которых пропорциональна величине перемещения (углу поворота). После предварительного преобразования эти сигналы со схем измерения точного и грубого отсчетов поступают на вход блока 32 преобразователей.
Система автоматического управления трубогибочным станом с нагревом токами высокой частоты обеспечивает расширение
диапазона регулирования как скорости про- дольной подачи, так и отношения скорос- тей в режиме работы стана с осадкой, обеспечение пространственной гибки труб, повыщение точности регулирования и конт- роля параметров гибки, а следовательно, повыщение производительности стана и улуч- щение качества готовых изделий. Кроме того, использование одних и тех же датчиков как для измерения скорости, так и для измерения длины и углов повыщае ность и упрощает схему построения Создание и внедрение гибочно дования с автоматизированным гибки труб позволяет организоват лизованное производство энергетич бопроводов в блочном исполнении вых и атомных электростанций
ральных газопроводов.
Формула изобретения
тором отношения скорсктей, блоком запоминающих и решающих устройств и с блоком управления, выходы которого связаны с электроприводами механизма продольной подачи, механизма поворота водила, гибочного блока, гибочной головки, головки манипулятора, через регулятор отношения скоростей - с вторым входом электропривода механизма поворота водила, через регулятор скорости продольной подачи - с вторым входом электропривода механизма продольной подачи, с пультом управления и индикации, а входы - с блоком запоминающих и решающих устройств, выходы которого соединены с регулятором отноше20
ния скоростей, с регулятором скорости про- 15 лителю сигнала датчика, который через дольной подачи, а входы с пультом управления и индикации.
определения разности, выходы которых через 25 и второй непосредственно подключены к счет- первую, вторую и третью схемы сравнениячику-таймеру, соединенному через регистр
соответственно связаны со схемой управления, выходы которой подключены к электроприводам механизма продольной подачи, механизма поворота водила, гибочного блока, гибочной головки, головки манипуля- 30 мой совпадения И-НЕ, выход которой сое- тора, регулятора скорости продольной по-динен с второй схемой совпадения И-НЕ,
выход старшего разряда сумматора связан с третьим элементом ИЛИ-НЕ и третьей схемой совпадения И-НЕ, а через четвертую схему совпадения И-НЕ - с входом чены к блоку запоминающих и решающих 35 „а «Сложение вспомогательного счетчика, устройств.вход на «Вычитание которого через третью
схему совпадения И - НЕ связан с четвертым элементом ИЛИ - НЕ и второй схемой совпадения И-НЕ, выходы которой соедипервыи ключ связан с датчиком продольной подачи, а через второй ключ - с датчиком положения гибочного блока, входы датчиков продольной подачи и положения гибочного блока через усилитель питающего напряжения и формирователь синуснрго напряжения соединены с делителем частоты, в.ход которого подключен к генератору импульсов, первый выход которого через делитель частоты
с первым входом сумматора, второй вход которого соединен со вспомогательным счетчиком, а выходы через первый и второй
элементы ИЛИ-НЕ связаны с первой с.хедачи и регулятора отношения скоростей, вторые входы первой, второй и третьей схемы определения разности и входы первой, второй и третьей схем сравнения подклю3. Система по п. 1, отличающаяся тем, что пульт управления и индикации содержит блок переключателей режимов, блок
переключателей задатчиков, выходы которых до нены с блоком управления и через частосоединены через коммутатор с вентилем, второй вход которого подключен к генератору импульсов, а выход через счетчик связан с блоком запоминающих и решающих устройств и дешифратором, выход которого подключен к блоку индикаторов, вход которого соединен с блоком управления.
45
50
томер с регулятором скорости продольной подачи и с блоком запоминающих и решающих устройств, выходы которого подключены к первому и второму ключам, второй канал блока преобразователей, вход которого подключен к датчику поворота водила, а выходы - к регулятору отношения скоростей, блоку управления и датчику поворота водила, третий канал блока преобразователей содержит третий, четвертый, пятый и шестой ключи, первые входы которых подключены к блоку запоминающих и решающих устройств, вторые входы третьего и пятого ключей, подключены к датчику положения гибочной головки, а вторые входы четвертого и шестого ключей -
подачи, регулятором отношения скоростей, к датчику положения головки манипуля- блоком управления, управляемым множи- тора, выходы третьего и четвертого ключей тельно-длительным устройством, второй вы ход оперативно-запоминающего устройства
через дешифратор режимов связан с блоко.м
через формирователь сигнала грубого отсчета связаны с триггером грубого отсчета, а выходы пятого и шестого ключей через
преобразователей и постоянно-запомннаю- ш,им устройством, выход которого подключен к преобразователю код-частота, а выход блока преобразователей соединен со схемой сравнения, выход которой соединен с регулятором скорости продольной подачи и регулятором отношения скоростей, а вход - с управляемым множительно-делительным устройством, выход которого соединен с регулятором отношения скоростей.
лителю сигнала датчика, который через
и второй непосредственно подключены к счет- чику-таймеру, соединенному через регистр
первыи ключ связан с датчиком продольной подачи, а через второй ключ - с датчиком положения гибочного блока, входы датчиков продольной подачи и положения гибочного блока через усилитель питающего напряжения и формирователь синуснрго напряжения соединены с делителем частоты, в.ход которого подключен к генератору импульсов, первый выход которого через делитель частоты
мой совпадения И-НЕ, выход которой сое- динен с второй схемой совпадения И-НЕ,
с первым входом сумматора, второй вход которого соединен со вспомогательным счетчиком, а выходы через первый и второй
элементы ИЛИ-НЕ связаны с первой с.хе5
0
томер с регулятором скорости продольной подачи и с блоком запоминающих и решающих устройств, выходы которого подключены к первому и второму ключам, второй канал блока преобразователей, вход которого подключен к датчику поворота водила, а выходы - к регулятору отношения скоростей, блоку управления и датчику поворота водила, третий канал блока преобразователей содержит третий, четвертый, пятый и шестой ключи, первые входы которых подключены к блоку запоминающих и решающих устройств, вторые входы третьего и пятого ключей, подключены к датчику положения гибочной головки, а вторые входы четвертого и шестого ключей -
к датчику положения головки манипуля- тора, выходы третьего и четвертого ключей
через формирователь сигнала грубого отсчета связаны с триггером грубого отсчета, а выходы пятого и шестого ключей через
1505624
2324
формирователь сигнала точного отсчета - сзаданной частоты, преобразователя за риггером точного отсчета, входы триггеровданной частоты и вход задатчика коэф(рубого и точного отсчетов подключены кфициентов соединены с блоком запомиформирователю опорного напряжения, выходнающих и решающих устройств, а управ риггера точного отсчета через ключ точ- ляемого делителя текущей частоты
юго отсчета соединен с генератором им-и преобразователя текущей частоты - с
лульсов и счетчиком точного отсчета, вы-блоком преобразователей, второй вход уси(оды которого соединены со схемой согла-лителя мощности соединен с блоком управювания отсчетов, регистром точного отсчеталения.
i счетчиком грубого отсчета, выход триг-7. Система по п. 1, отличающаяся тем,
-ера грубого отсчета через ключ грубого датчик положения гибочного блока вы)тсчета, соединенный входом с генераторомполнен в виде фазовращателя линейного
, 1мпульсов, связан со схемой ИЛИ, выходперемещения, статором которого является
оторой связан со счетчиком грубого от-цилиндрический стержень с нарезанной на
:чета, выходы которого соединены с регист-его поверхности четырехзаходной резьбой,
)ом грубого отсчета и схемой согласова-15 в пазы которой уложены две бифилярные
1ИЯ отсчетов, выходы которой связаны сообмотки, смещенные одна относительно дру;хемой ИЛИ и счетчиком грубого отсчета,гой на четверть шага резьбы, соединен3 один из выходов - со схемой управ-ные через схему измерения с входом блока
пения измерением, соединенной с третьим ипреобразователей, а ротором служит охва4етвертым ключами, регистром точного от-тывающая стержень втулка, на внутрен;чета и регистром грубого отсчета, выход20 jjg поверхности которой имеется такая же
оторого соединен с блоком управления.четырехзаходная резьба, в пазы которой со
сдвигом на половину шага резьбы уложены
регулятор скорости продольной подачи со-обмотку, которая связана с выходом блока
аержит управляемые делители заданной и25 преобразователей.
текущей частоты, входы которых соединены8. Система по п. 1. отличающаяся тем, с задатчиком постоянной времени интегри-что датчик положения головки манипулирования, а выходы через реверсивныйтора выполнен в виде фазового преобра счетчик и цифроаналоговый преобразова-зователя углового перемещения, содержа- |тель - с первым входом сумматора, а вто-щего синусно-косинусные бесконтактные рой вход цифроаналогового преобразователя30 многополюсные вращающиеся трансформа- подключен к задатчику коэффициентовторы грубого и точного отсчетов, выходы усиления, преобразователи заданной и теку-которых через схемы измерения соответст- |щей частоты, выходы которых через уст-венно грубого и точного отсчетов связаны :ройство вычитания соединены с усилителемс блоком преобразователей, входной вал пропорциональной составляющей, второйредуктора точного отсчета связан с валом :вход которого соединен с задатчиком ко-35 объекта измерения, а выходной вал редук- ;эффициентов усиления, а выход - с вторымтора точного отсчета - с трансформато- I входом сумматора, выход которого черезром точного отсчета и входным валом iусилитель мощности соединен с электро-редуктора грубого отсчета, выходной вал i приводом механизма продольной подачи,которого связан с трансформатором гру- вторые входы управляемого делителябого отсчета.
Н |7
H k
..r°L
33
ri
«г,
11
18
17
fj
31
M
J
20
Стержень g
.Ш
,11
тшМШШ /Мшт.
1
115
32
,11
116 Я7 У/7 Обмотка
возбуждение гнальная
оомотна
ФигЛ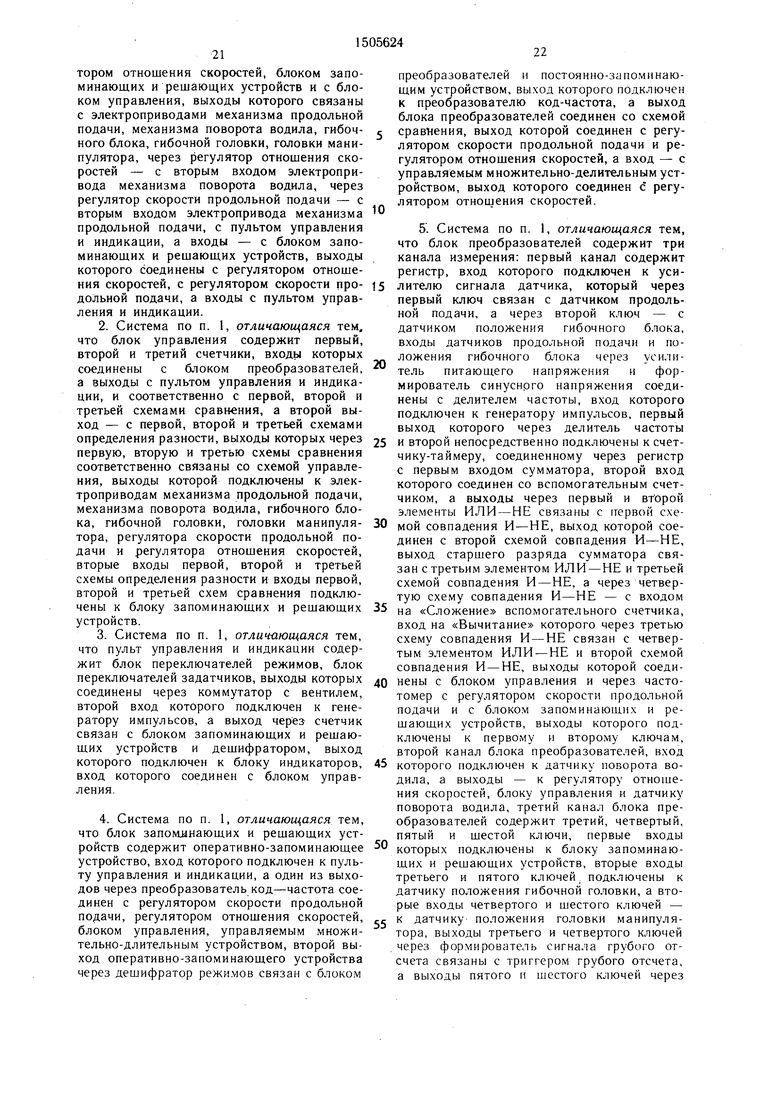
| Система управления трубогибочным станком | 1978 |
|
SU718196A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
