Изобретение относится к захватным головкам промьшлеиньпх роботов и может быть использовано для перемещения в пространстве предметов произвольной формя.
Цельк изобретения является расширение области применения .захвата за счет обеспечения возможности схватывания тонкостен гь1х предметов произвольной формы, а также предметов, не защищенных от вредного действия магнитного или электростатического полей,
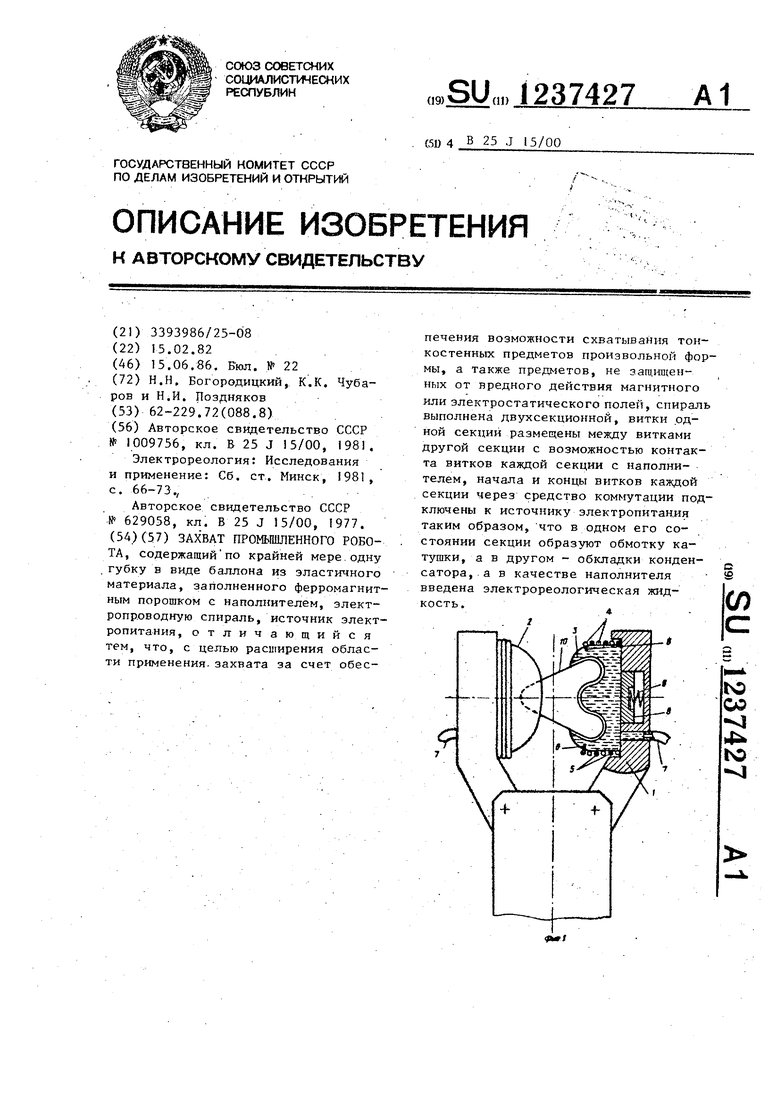
На фиг. 1 и 2 изображен предлага емьт захвату на фиг. 3 - принципиальная электри геская схема захвата.
На фиг. обозначены колодка 1 баллон 2 губки, ферромагнитный порошок 3 с наполнителем, первая 4 и вторая 5 секции электропроводной спирали, электроды 6, эластичньп съемный шланг 7, немагнитный поршень 8, пружина 9, предмет 10, средство I коммутации, выполненное, например, в .виде двойного двухпозиционного переключателя, первая 12 и вторая 13 клеммы источника электропитания.
Захват имеет две колодки 1, разводимые в стороны или сводимые путем поворота вокруг общей оси.
Колодка 1 имеет отверстие и расточку со стороны баллона 2, в которой помещен немагнитный поршень 8, подпружинен1Гс1Й пружиной 9. Отверстия колодок соединены эластичным съем- ным шлангом 7. Портень 8 и шланг .7 служат для перераспределения массы порошка 3 с наполнителем, заполняющей внутреннюю полость баллона 2,
Наполнителем является электро- реолог}гческая жидкостьр в качестве которой может быть использована, ьгапример, суспен.зия мелкодисперсного порошка кремнезема в минеральном масле„
Секции 4 и 5 спирали могут б.ыть размещены на поверхности баллона 2 {фиг, 1) или помещены внутри него (фиг, 2), Витки секции 4 расположены между витками секции 5 и плкрыты изоляцией. Витки каждой секции могут контактировать с наполнителем с помощью электродов 6 (фиг. 1) или за счет размещения внутри баллона 2 (фиг. 2).
Захват промьшгленного робота работает следующим образом.
В исходном положении (перед захватом предмета 10) колодки 1 разведены, электропитание на клеммы 12 и 13 не подано, баллоны 2 губок находятся в свободном состоянии.
При сближении путем поворота вокруг оси колодок 1 захвата баллоны 2 охватывают предмет 10 вследствие эластичности баллонов и перераспределения в них массы порошка 3 с наполнителем в полость расточки колодки. Степень охвата предмета зависит от его формы, веса и прочности и определяется требованиями к ис- пользовантпо захвата в технологическом процессе.
По окончании процесса охвата предмета 10 на клеммы 12 и 13 электропитания: подают постоянный электрический ток, протекание которого по секциям 4 и 5 спирали вызывает затвердевание наполнителя баллонов 2, что обеспечивает схватыванр5е предмета 10 без создания дополнительных механических нагрузок на его поверхность и без нарушения тем самым его прочности.
Дпя освобож,цения предмета 10 пре- кращрлот подачу постоянного тока к клеммам 12 и 13 и разводят колодки 1 путем поворота вокруг их оси.
При нериод1-гческом захвате предметов одинаковой формы и размеров после охвата первого экземпляра предмета 10 захватом и подачи постоянного тока на клеммы 12 и 13 схватывание последующих экземпляров предмета можно осуществить только путем поворота колодок без прекращения подачи постоянного тока на клеммы 1 2 и 1 3.
icxaнизм затвердевания наполнителя баллонов 2 губок захвата определяется режимом его работы, которьпТ, Б свою очередь5 обусловливает вид .поля рассеивания и, соответс7-венно,и тип предметов 10, которые могут быть захвачены без оказания на них вредного действия поля рассеивания..
Например, в положении Э пере- кл ачателя (фиг. 3) каждая из секций 4 и 5 спирали подключена к соответствующей клемме 12 или 13 только од- ни СВОИМ концом. При таком подключении спиралей они выполняют функцию обкладок конденсатора, с помощью которых Создается в баллоне 2 электро- .статргческое поле, вызывающее затвер3
девание наполнителя баллона 2 за счет изменения агрегатного состояшш электрореологической жидкости, используемой в .качестве наполнителя. Поле рассеивания вокруг губки является электростатическим и оказывает вредное действие на предметы, чувствительные к действиям такого поля, например, его нельзя применять для захвата предметов из пьезодиэлектри- ка с металлизированными гранями (детали электроакустических устройств). В этом случае следует перевести переключатель в положение М.
При переводе переключателя в положение М (фиг. 3) секции 4 и 5 спирали соединяются через переключатель последовательно-согласно, т.е образуют единую электромагнитную обмотку.
374274
При подаче постоянного тока на клеммы 12 и 13 заа обмотка создаст магнитное поле, которое вызывает затвердевание наполнителя баллона 2 5 губки захвата путем изменения аг ре- гатного состояния ферромагнитного порошка 3, а вокруг баллона 2 возникает магнитное поле рассеивания. В этом режиме нельзя производить захват
10 предметов 10, чувствительных к воздействию такого поля, HanpjrMep ферромагнитных сердечников . При этом следует перевести переключатель в положение Э.
15 Изобретение позволяет расширить область применения захвата за счет уменьшения давления на поверхность схватываемого предмета и возможгюс- ти переключения режима работы захва20 та с электромагнитного на электростатическое поле, и наоборот.

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора В.Г.Вохмянина | 1990 |
|
SU1764992A1 |
| МАГНИТОДИНАМИЧЕСКОЕ АКУСТИЧЕСКОЕ УСТРОЙСТВО | 1992 |
|
RU2027319C1 |
| Устройство для отпайки выводов электронных элементов из монтажных отверстий печатных плат | 1988 |
|
SU1599164A1 |
| Захват манипулятора | 1982 |
|
SU1034896A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Устройство для электростатического распыления пестицидов | 1979 |
|
SU1075952A3 |
| Устройство для измерения радиальных сил и способ его изготовления | 1990 |
|
SU1775623A1 |
| Схват манипулятора | 1984 |
|
SU1192970A1 |
| Захватное устройство | 1990 |
|
SU1775290A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1131648A1 |

Редактор А. Лежнина
Составитель Ф. Мизиано Техред Г.Гербер
Заказ 3237/17Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий . 113035j Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул.-Проектная, Д .
Корректор Л. Пилипенко
| Схват микроманипулятора | 1981 |
|
SU1009756A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Электрореология: Исследования и применение: Сб | |||
| ст | |||
| Минск, 1981, с | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
