Изобретение относится к грузозахватным устройствам а именно к манипуляторам для погрузочно-разгрузочных работ, и может быть испол зовано в промышленных работах, применяемых в машиностроении, металлообрабатывающей и других отраслях народного хозяйства, где необходимо осуществлять точный схват груза без смещения его с места во время захвата. Известен исполнительный орган манипулятора, содержащий приводной элемент в виде шестерни и дифференциальный механизм, включающий кор- пус, на котором закреплена шестерня, являющаяся водилом дифференциал В корпусе размещены шестерни-сателлиты, находящиеся в постоянном зацеплении с полуосевыми шестернями, Губки кинематически связаны с ходовым винтом, выполненным в виде двух выходных полуосей, и воспринимают движение при помощи двух кинематических пар, совершая схват груза 1 . Однако известный исполнительный орган манипулятора осуществляет точ ный схват только жестко установленных предметов. Цель изобретения - расширение технологических возможн-остей путем исключения необходимости использова ния дополнительгого устройства пози ционирования груза после его схвата Для достижения цели исполнительный орган манипулятора, содержащий корпус, вал с рукой и схват с губка ми, установленными на ходовом винте с резьбой разного направления, снаб жен тормозным устройством, кареткой и конической передачей, ведущая . шестерня которой связана с валом ру корпусом и тормозным устройством, причем ходовой винт расположен в каретке. Кроме того, в каретке выполнена направляющая, шарнирно связанная с корпусом. На фиг. 1 изображен исполнительный орган манипулятора; на фиг. 2 вид А на фиг. 1. Исполнительный орган манипулятор содержит губки 1 и 2, электродвигатель 3, связанный с ходовым винтом выполненным с резьбой разного напра ления, каретку 5 с направляющей 6, связанной через втулки 7 с корпусом 8 . 2 Губки 1 и 2 ограничены от поворота направляющей 9. Исполнительный орган оснащен конической зубчатой передачей, ведущая шестерня 10 которой связана с валом 11, а ведомая шестерня 12 находится на валу 13, на который воздействует тормозное устройство 14, выполненное, например, в виде тормозных колодок 15, воздействующих на вал 13 посредством рычагов 16, связанных с электромагнитом 17, электрически связанным с системой управления манипулятором. Зажимаемый груз 18 установлен на подставке 19. Устройство работает следующим образом. Электродвигатель 3 вращает ходовой винт 4, выполненный с резьбой разного направления, при этом губки 1 и 2, размещенные, на резьбе, 15аздвигаются на расстояние большее, чем диаметр груза 18.. Вал 11 руки манипулятора, на котором подвешен испо тнительньй орган, опускается и груз 18 оказывается между губками 1 и 2. При этом из-за неизбежной неточности позиционирования в особенности для манипуляторов большой грузоподъемности и при захвате длинномерных грузов возникает эксцентрицитет вертикальной оси относительно оси симметрии захвата и перекос горизонтальной оси симметрии груза 18, лежащего на подставке 19 или, например, на полу. Для длинномерных грузов большого веса перекос горизонтальной оси может быть значительным и, следовательно, контакт губок и груза осуществляется не по всей поверхности контакта. Электродвигатель 3 переключается и губки 1 и 2 перемещаются навстречу друг другу до соприкосновения хотя бы одной из них с поверхностью схватываемого груза 18. Губка, которая первая вошла в соприкосновение, останавливается и не оказывает силового воздействия до тех пор, пока вторая губка, продолжая двигаться, теперь уже с абсолютной скоростью, равной скорости перемещения самой губки по ходовому винту 4 и скорости перемещения каретки 5, жестко связанной с направляющей 6 относительно корпуса 8 и каретка 5 свободно поворачивается относительно вала 11 руки манипулятора, компенсируя угловое 3 несовпадение осей груза 18 и исполнительного органа. Затем груз 18 зажимается двумя губками 1 и 2, а тормозное устройство 14, получив команду системы управления манипуля тором, фиксирует это положение, зажимая тормозными колодками 15 ось ведущей шестерни 12, нахолящейся в зацеплении с ведомой шестерней 10. После схвата груза 18 рука манипулятора поднимается и переносит груз в требуемое положение. При укладке груза 18 на подставку 19 все операции происходятв обратной последовательности, что п 8 4 воляет точно уложить груз на подстав ку 19 даже при неточной остановке руки манипулятора. Если после схвата груза возникает необходимость егю поворота, то посредством такого захвата манипулятора эту технологическую операцию можно осуществить за счет возможности поворота захвата манипулятора вокруг вала 11 руки. Предлагаемая конструкция позволяет осуществить захват не только жестко закрепленных грузов, но и установленных на подставках или просто на полу, исключая при этом возможность смещения груза с места.

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1976 |
|
SU538957A1 |
| Автоматический многозахватный манипулятор | 1990 |
|
SU1731626A1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| Захват манипулятора | 1984 |
|
SU1333573A1 |
| Манипулятор | 1987 |
|
SU1657369A1 |
| Манипулятор | 1983 |
|
SU1094734A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2005 |
|
RU2381099C2 |
| Захват манипулятора | 1985 |
|
SU1328192A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Манипулятор | 1986 |
|
SU1357220A1 |
ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА, содержащий, корпус, вал с рукой и охват с губками, установленными на ходовом винте с резьбой разного направления, отличающ и и с я тем, что, с целью расширения технологических возможностей, он снабжен тормозным устройством, кареткой и конической передачей, вег дущая шестерня которой связана с валом руки, а ведомая шестерня шарнирно связана с корпусом и тормозным устройством, причем ходовой винт расположен в каретке, кроме того, в каретке выполнена-направляющая, шарнирно связанная с корпусом.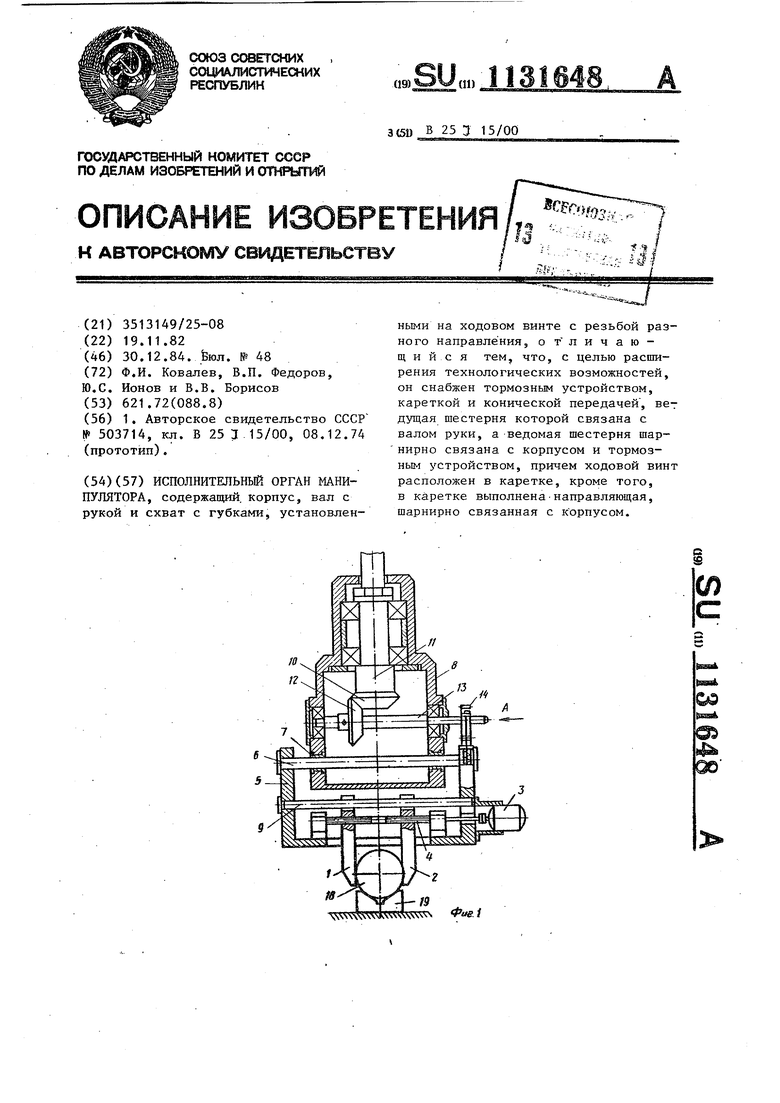
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват манипулятора | 1974 |
|
SU503714A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
