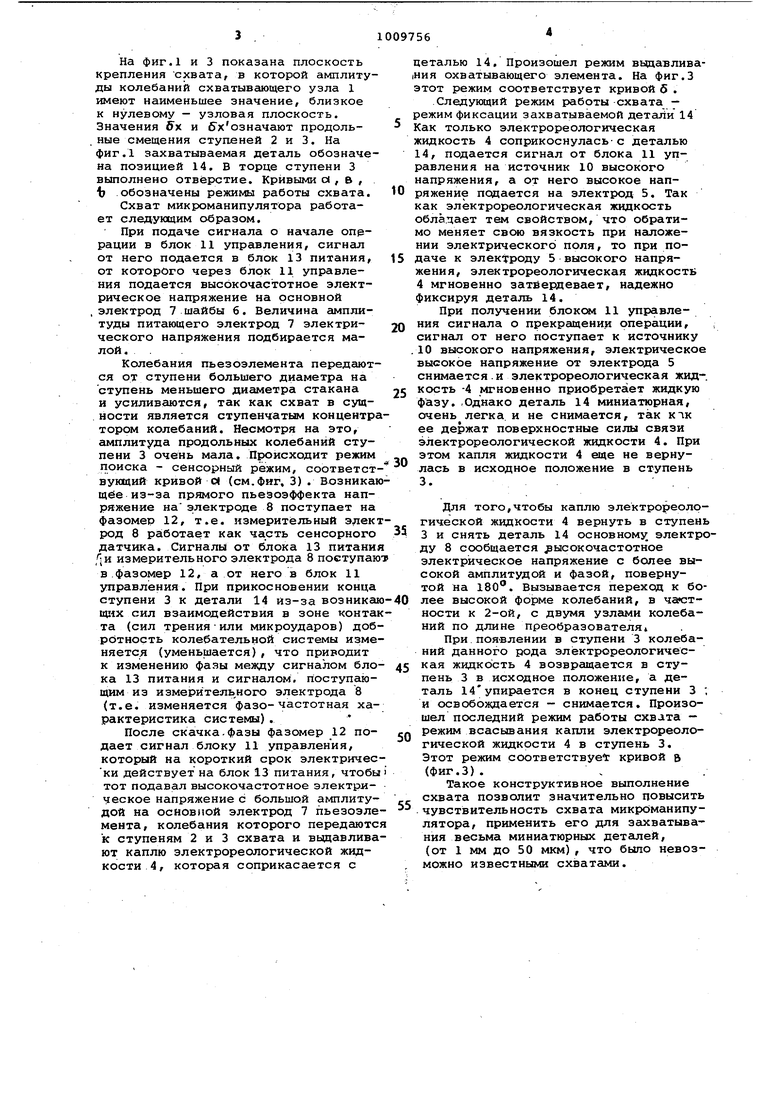
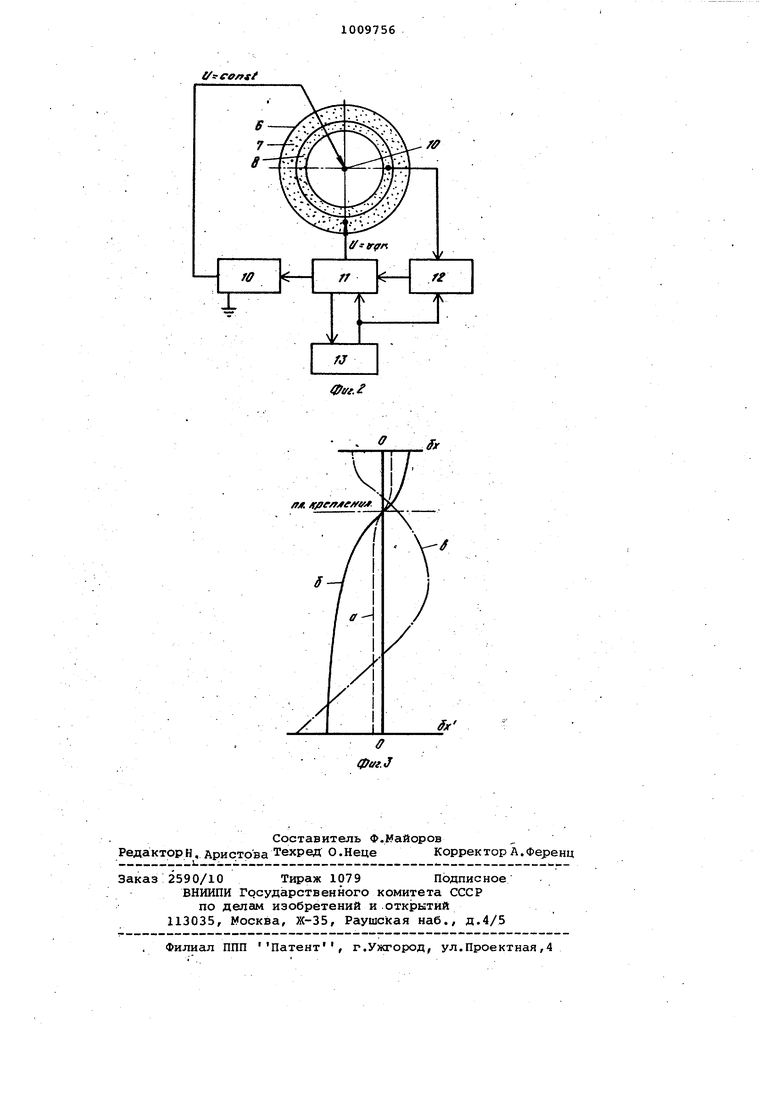
Изобретение относится к области приборостроения может быть использовано при разработке конструкции микророботов и микроманипуляторов и применимо для зах-ватьшания миниатюрных деталей, например, элементов микроэлектроники, при проведении биоисследований. Известен охват манипулятора содержащий губки, укрепленные на подвижных рычагах, привод рычагов, .сенсорные датчики, выходы которых ;соединены с входами блока управле1ния, подключенного-к входам блока питания. Недостатками схвата являются сло . ность конструкции и сравнительно мала чувствительность, из-за чего он не пригоден для захвата весьма миниатю ных деталей (от 1 мм до 50 мкм). Известен также схват микроманипу лятора С2 3, ссиержащий корпус, схва тывающий элемент в виде губок, зак-. репленных на концах рычагов, привод губок, выполненный, например, в вид пьезопластины с электродами, сенсор ные датчики, коммутатор, а также блоки управления и питания. В нем не мене чем.один из электродов разделен на асти, соединенные электрически в шахматном порядке между собой, а через коммутатор -г с блоками питания и управления, при этом вторые концы рычагов контактируют с пьезокерамической пластиной, а сенсорные датчики выполнены в виде частотного детектора и масштабного блока, подключенных последовательно черёй комму татор к электродам пьезокерамической пластины, причем масштабный блок . соединен с.входом блока управления, а выходы блока управления соединены соответственно с входом управления коммутатора и с входом управлений блока питания. Данное техническое решение является наиболее близким к изобретению по технической сущности и достигаемому результату. Однако при сравнительно больших габаритах он обладает сравнительно низкой чувствительностьюJ что не позволяет использовать его для -захвата весьма миниатюрных деталей от 1 мм до 50 мкм. Целью нас оящего изобретения является повышение чувствительности Поставленная.цель достигается тем, что микроманипулятора, содержащий схватывающий узел с прив дом, выполненным в виде пьезоэлемен та с расположенными на нем двумя электродами, подключенными к блокам управления и питания, снабжен источником .высо; ого напряжения, подкл ченным к первому выходу блока управления, ифазомером, один из входов которого, соединен с выходом блока питания, причем схватывающий узел выполнен в виде электрода и двухступенчатого стакана, наполненного электрореологической жидкостью, в которую помещен электрод, подключенный к источнику высокогр напряжения, при этом в торце ступени меньшего диаметра стакана выполне- но отверстие, а в ступени большего диаметра установлена дополнительно введенная в схват герметичная крышка с отверстием под электрод, причем пьезоэлемент привода выполнен в виде шайбы, расположенной на торце ступени большего диаметра стака.на, а электроды привода-в виде двух концентрических колец, при этом вто,рой выход блока управления соединен с наружным кольцом электрода привода, а внутреннее его кольцо через фазомер подключено к одному из входов блока управления, к другому входу которого подключен выход блока питания, причем третий выход блока управления соединен с входом блока питания. На фиг.1 изображен схват в продольном разрезе; на фиг.2 показана блок-схема управления схватом; на фиг.З изображены эпюры распределения колебаний в упругой системе схвата. Схват микроманипулятора содержит схватывающий узел, выполненный в виде двуступенчатого стакана 1 со ступенью 2 большего диаметра и стуренью 3 меньшего диаметра, внутрь которого залита эЛектрореологическая жидкость 4 и помещен электрод 5 привода. Пьёэоэлемент выполнен в виде шайбы 6, расположенной на торце ступени- большего.диаметра стакана. Электроды 7 и 8 выполнены в виде двух концентрических колец. Основным электродом является электрод 7, а измерительным - электрод 8. Корпус снабжен эластичной герметичной крышкой 9, установленной в ступе«и большего диаметра стакана. Электрод 5 проходит через йрышку 9 и служит для подведение к электрореологической жидкости высокого напряжения. Для этого электрод 5 подключен .к источнику 10 высокого напряжения, вход которого соединен с первым выходом блока 11 управления (фиг.2). Второй выход блока 11 управления подключен к основному электроду 7 шайбы 6. Измерительный электрод 8 шайбы б подключен к входу фазомера 12, выход которого подключен к входу блока 11 управления. Третий выход блока 11 управления соединен с входом блока 13 питания, выход которого соединен с входами блока 11 управления и фазомера 12. На фиг.1 и 3 показана плоскость крепления схвата, в которой амплитуды колебаний схватывающего узла 1 имеют наименьшее значение, близкое к нулевому - узловая плоскость. Значения 5к и бхозначают продоль. вые смещения ступеней 2 и 3. На фиг.1 захватываемая деталь обозначена позицией 14. В торце ступени 3 выполнено отверстие. Кривыми с( , в , Ъ -Обозначены режимы работы схвата. Схват микроманипулятора работает следующим образом. При подаче сигнала о начале опэрации в блок 11 управления, сигнал от него подается в блок 13 питания, от которого через блок 11 управления подается высокочастотное электрическое напряжение на основной .электрод 7 шайбы 6. Величина амплитуды питающего электрод 7 электрического напряжения подбирается малой. . . Колебания пьезоэлемента передаются от ступени большего диаметра на ступень меньшего диаметра стакана и усиливаются, так как схват в сущ.ности является ступенчатым концентра тором колебаний. Несмотря на это, амплитуда продольных колебаний ступени 3 очень мала. Происходит режим поиска - сенсорный режим, соответст вугаций кривой 01 (см.фиг. 3) . Возникаю щее из-эа прямого пьезоэффекта напряжение наэлектроде 8 поступает на фазомер 12, т.е. измерительный элек род 8 работает как часть сенсорного датчика. Сигналы от блока 13 питани ,;и измерительного электрода 8 поступаю в фазомер 12, а от него в блок 11 управления. При прикосновении конца ступени 3 к детали 14 из-за возникаю щих сил взаимодействия в зоне конта та (сил тренияили микроударов) доб pdTHOCTb колебательной системы изме няется (уменьшается), что приводит к изменению фазы между сигналом бло ка 13 питания и сигналом, поступающим из измеритеяь ного электрода 8 (т.е. изменяется фазо-частотная характеристика системы). После скачка.фазы фазомер 12 подает сигнал блоку 11 управления, который на короткий срок электричес ки действует на блок 13 питания, чтобы тот подавал высокочастотное электрическое напряжение с большой амплитудой на основной электрод 7 пьезоэле мента, колебания которого передаютс к ступеням 2 и 3 схвата и вьодавлива ют каплю электрореологической жидкости 4, которая соприкасается с еталью 14, Произошел режим вьщавливаия охватывающего элемента. На фиг.З тот режим соответствует кривой б. .Следующий режим работы -схвата - ежим фиксации захватываемой детали 14 ак только электрореологическая идкость 4 соприкоснулась- с деталью 14, подается сигнал от блока 11 управления на источник 10 высокого напряжения, а от него высокое напряжение подается на электрод 5. Так как электрореологическая жидкость обладает тем свойством, что обратимо меняет свою вязкость при нгшожении электрического поля, то при подаче к электроду 5 высокого напряжения, электрореологическая жидкость 4 мгновенно затвердевает, надежно фиксируя деталь 14. При получении блоком 11 управления сигнала о прекращении операции, сигнёш от него поступает к источнику 10 высокого напряжения, электрическое высокое напряжение от электрода 5 снимается . и электрореологическая жид-, кость -4 мгновенно приобретает жидкую фазу. .Однако деталь 14 миниатюрная, очень легка, и не снимается, так клк ее держат поверхностные силы связи электрореологической жидкости 4. При этом капля жидкости 4 ице не вернулась в исходное положение в ступень 3. Для того,чтобы каплю электрореологической жидкости 4 вернуть в ступень 3 и снять деталь 14 основном электроду 8 сообщается высокочастотное электрическое напряжение с более высокой амплитудой и фазой, повернутой на 180°. Вызывается переход к более высокой форме колебаний, в частности к 2-ой, с двумя узлами колебаний по длине преобразователя При.появлении в ступени 3 колебаний данного рода элёктрореологическая жидкость 4 возвращается в ступень 3 в исходное положение, а деталь 14упирается в конец ступени 3 , и освобождается - снимается. Произошел последний режим работы схвата - режим всасывания капли электрореологической жидкости 4 в ступень 3. Этот режим соответствует кривой в (фиг.З)... Такое конструктивное выполнение схвата позволит значительно повысить чувствительность схвата микрОманипулятора, применить его для захватывания весьма миниатюрных деталей, (от 1 мм до 50 мкм), что было невозможно известными схватами.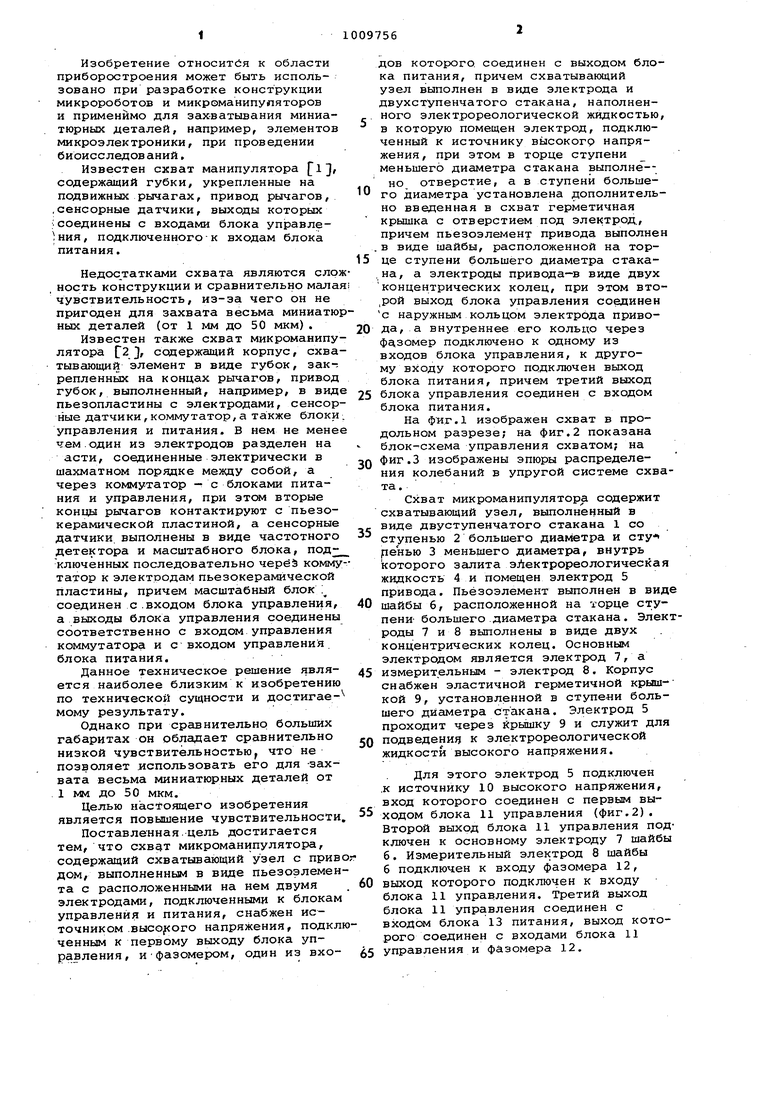
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват микроманипулятора | 1980 |
|
SU867647A1 |
| Схват микроманипулятора | 1980 |
|
SU867646A1 |
| Схват микроманипулятора | 1988 |
|
SU1602735A1 |
| Схват промышленного робота | 1990 |
|
SU1798188A1 |
| МЕХАТРОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СХВАТ | 2010 |
|
RU2425747C1 |
| Сейсмоприемник | 1986 |
|
SU1374161A1 |
| Манипулятор | 1986 |
|
SU1333570A1 |
| Передача | 1989 |
|
SU1753107A1 |
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СХВАТ | 2013 |
|
RU2529126C1 |
СХВАТ МИКРОМАНИПУЛЯТОРА, , содержащий схватывающий узел с при- водом, выполненным в виде пъезоэлемента.с расположенньми на нем двумя электродё1ми, подключенными к блокам управления и питания, о т л и ч а;ющ.и и с я тем, что, с целью повышения чувствительности, он снабжен источником высокого напряжения, подключенным к первому выходу блока управления, и фазомером, один из входов которого. сое дииен с выходом блока питанияf причем схватывающий узел выполнен .в виде электрода и двухступенчатого стакаиа, наполнен- ного элект рореологической жидкостью, в.которую помещен электрод, подключенный к источнику высокого напряжения, при этом в торце ступени мень-. шего диаметра стакана выполнено отверстие, а в ступени большего диаметра установлена дополнительно введенная .герметичная крьоака с отверстием под , причем пьезоэл04ент привода выполнеи в вцде шайбы, расположенной на торце ступени большего диаметра стакана, а электроды привода - в виде двух концентрических колец, при этом второй выход блока.управления соединен-с наружньм кольцом электрода привр ор а внутреннее его кольцо фазомер подключено к одному из входов блока управления, к другому входу которого подключен .выхо блока питания, причем третий блока /управления соединен с вхсщом блока питания. О сд О)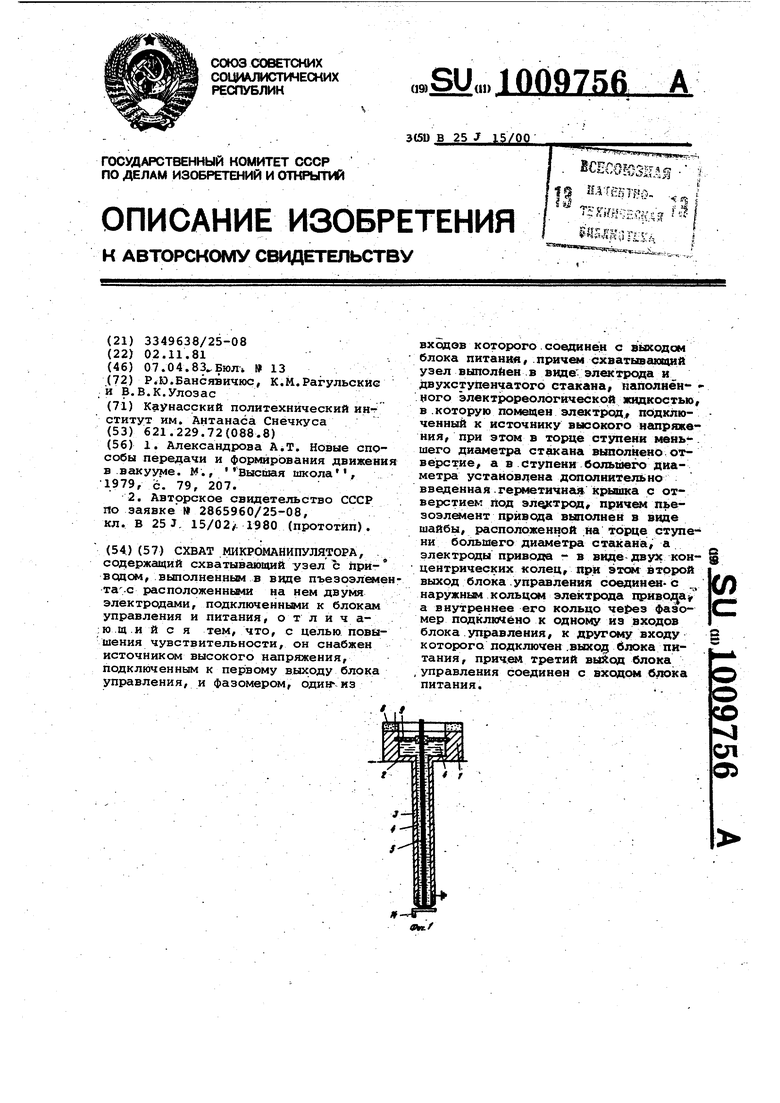
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Александрова А.Т | |||
| Новые способы передачи и формирования движения в вакууме | |||
| М., Высшая школа, 1.979, с | |||
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке 2865960/25-08, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
