1239733
Изобретение относится к вычисли5 с щ
тельной технике и может быть использовано для автоматизированного синтезй плоских направляющих и передаточных шарнирно-рычажных многозвенных механизмов по части и полному числу параметров.
Цель изобретения - расширение функциональных возможностей устройства
за счет об.еспечення расчета механизма О движок того потенциометра 10, сред- на заданную функцию угла поворота вы-. няя точка которого подключена к той
ламели на которой установлена щетка коллектора 12,. при этом стрелка индикатора должна показать нуль.
ходного вала от угла поворота входного вала и за счет моделирования кулисной кривой.
На чертеже изображено предлагаемое 15 Далее переходят к следующему зна- устройство., . чению угла ср ср и операции повторяУстройство выполнено-в виде геометрической модели плоского передаточно- направляющего шарнирно-рычажного мехают аналогично для всех остальных ламелей и углов Cf.
После тарировки восстанавливают 20 кинематическую цепь модели и включа- ют привод 15, при этом действительный угол поворота выходного звейа зависит от параметров и угла поворота ведущего, звена:
низма, состоящего из изменяемых по
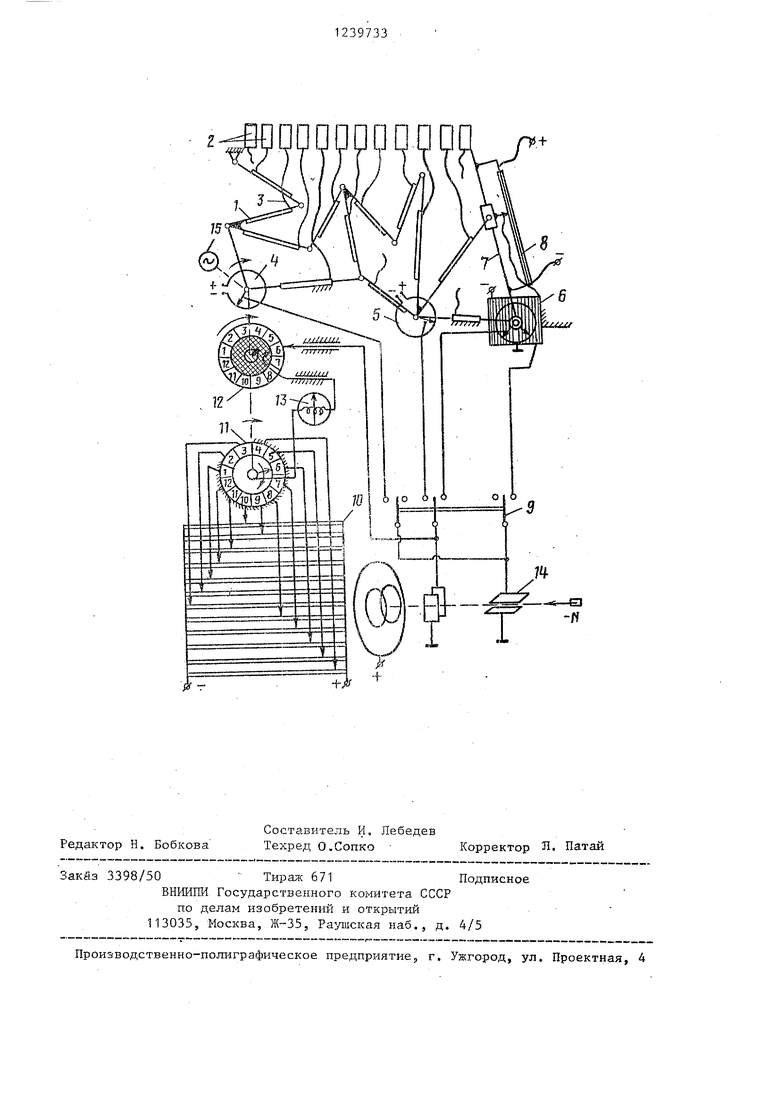
длине стержней 1 с помощью гидроза- датчиков 2,соединенных с ними гибкими птангами 3. Входная и выходная ось устройства снабжены входным 4 и выходным 5 потенциометрами, и в случае направляющего механизма - синусно-ко- синусным потенциометром 6, установленным на выходной оси кулисы 7 с-укрепленным на ней линейным потенциометром 8.,
Устройство содержит также переключатель 9 режимов, наборное поле потенциометров 10 задающих, коллекторы , заданной функции 11 и действительной функции 12, стрелочный индикатор 13, осциллограф 14 и привод 15, Средние точки потенциометров 10 электрически соединены с ламелями коллекторов 11, щетка коллектора 12 соединена со . средними точками потенциометров 5 и 6 через переключатель 9 режимов, другая щетка коллектора 12 соединена с клеммой индикатора 13, а щетка коллектора 11 соединена с другой клеммой .индикатора 13.
Работа устройства происходит в двух режимах: Передаточный механизм и Направляющий, механизм.
В первом режиме задается функция угла поворота выходного звена от /угла поворота входно1 о звена-кривоши- Па или функция угла поворота выходной оси от угла поворота входной оси:
д f (cf).
Затем произв одится тарировка наборного поля следующим образом.
Ведущее звено устанавливают на некоторый начальный угол отсчета ср так, что щетки находятся на ламе лях. Выходное звено устанавливается на угол, 5 соответствующий Ср, , при этом кинематическая цепь между ведомым и веду- щим звеньями должна быть отключена, включается напряжение .питания потенциометров А - 6 и 10, передвигается
дикатора должна показать нуль.
ют аналогично для всех остальных ламелей и углов Cf.
После тарировки восстанавливают кинематическую цепь модели и включа- ют привод 15, при этом действительный. угол поворота выходного звейа зависит от параметров и угла поворота ведущего, звена:
q). f(g,, г, m ).
4
где , , К,,,.. в,f j - длины соответствующих стержней; vn - количество стержней.
Поскольку длины стержней установлены гидрозадатчиками 2 произвольно, действительный мгновенный угол выход- кого звена не равен заданному, т.е.
f (.,,.E,j, .b
ч.)
В этом случае напряжение средней точки потенциометра 3, обусловленное действительным углом, отличается от ; напряжения средней точки соответствующего протарированного потенциометра 10 и индикатор 13 должен указать мгновенную разность потенциалов, пропорционального мгновенному углу мгновенной ошибки, затем производя отсчет д,тшн стержней по шкалам гидрозадатчиков,
При работе устройства во этором режиме переключатель 9 должен стоять в положении Направляющий механизм. Задается уравнение шатунной .кри-
5
YM f, (Ч )5 Х ).
Далее производится новая тарировка потенциометров 10, при этом кривошип устанавливается на угол - Cf g , а ползун кулисного выходного звена устанавливается в плоскости, соответствующей координатам
, f,W; х, ,). .
При этом добиваются показания нуля индикатором, после тарировки кинематическую цепь восстанавливают и включают привод 15, Для контроля, формы действительной зад|анной функции служит осциллограф 14.
Формула изобретения
1. Моделирующее устройство.для синтеза шарнирно-рычажных механизмов содержащее группу стержней, соединенных один с другим и с входным и выходным валами в соответствии с геометрией моделирующего шарнирно-рычажного механизма, отличающееся тем, что, с целью расширения функциональных возможностей за счет обеспечения расчета механизма на заданную функцию угла поворота выходного вала от угла поворота входного вала, в него дополнительно введены входной и выходной потенциометры, стрелочный -индикатор, переключатель, осциллограф группа задагадйх потенциометров и два кольцевых коллектора, причем подвижный контакт входного потенциометра, первый кольцевой коллектор и подвижный контакт второго кольцевого коллектора механически связаны -с входным валом устройства, подвижный контакт выходного потенциометра ме ханически связан с выходным валом устройства, подвижные контакты потен- циометров соединены соответственно с первым и вторым неподвижными контак- тагш переключателя, первый и второй
0
5
0
5
5
подвижные контакты котЬрого соединены соответственно с вертикальньми и горизонтальными отклоняющими пластинами осциллографа, выводы задающих потенциометров группы соответственно объединены и подключены к источнику постоянного тока, а подвижный контакт каждого из потенциометров соединен с соответствующей неподвижной ламелью второго кольцевого коллектора, подвижный контакт которого соединен с одним выводом стрелочного индикатора, другой вывод которого соединен с первым неподвижньп контактом пер- ,вого кольцевого коллектора, второй неподвижный контакт которого соединен с вторым подвижным контактом переключателя .
2, Устройство по п.1, о т л и - чающееся тем, что, с целью расширения функциональных вожможнос- тей за счет моделирования кулисной кривой, в него дополнительно введены синусно-косинусный и линейный потенциометры и кулиса, ползун которой соединен с выходным валом устройства, два подвижных контакта синусно- косинусного потенциометра механически связаны с осью кулисы и соединены соответственно с третьим и четвертым неподвижными конта стами переключателя, третий подвижный контакт которого соединен с его первым подвижны контактом, а линейный потенциометр закреплен на кулисе, которой механически соединен с подвижным контактом линейного потенциометра, подключенным к одному выводу синусно- косинусного потенциометра, другой вьшод Которого соединен с одним выводом линейного потенциометра, другие вьшоды которого подключены к источнику постоянного тока.
+;5f
| название | год | авторы | номер документа |
|---|---|---|---|
| Моделирующее устройство для синтеза рычажных механизмов | 1980 |
|
SU932529A1 |
| ДВИГАТЕЛЬНЫЙ ПРИВОД ТОКОРАЗЪЕДИНИТЕЛЯ | 2007 |
|
RU2337261C1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| Устройство для определения частотных характеристик систем автоматического регулирования | 1971 |
|
SU443366A1 |
| Функциональный преобразователь хода поршня | 1975 |
|
SU531050A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 1996 |
|
RU2124661C1 |
| Устройство для регистрации быстроизменяющихся давлений | 1947 |
|
SU77626A1 |
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| Масштабно-дистанционная фотокопировальная система | 1955 |
|
SU121164A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
Изобретение относится к вычислительной технике и может быть использовано для автоматизированного синтеза плоских направляющих и передаточных шарнирно-рьгаажных многозвенных механизмов по части и полному числу параметров. Целью изобретения является расширение функциональных возмож- ностей устройства за счет обеспечения расчета механизма на заданную функцию угла поворота выходного вала от угла поворота входного вала и за счет моделирования кулисной кривой. Данная цель достигается введением в устройство входного и выходного потенциометров, стрел очного индикатора, переключателя, осциллографа, группы задающих потенциометров и двух кольцевых коллекторов. Работа устройства происходит в двух режимах Передаточный механизм и Направляюпщй механизм. 1 з.п. ф-лы, 1 ил. i (Л
Редактор Н. Вобкова
Составитель И, Лебедев
Техред О.Сопко Корректор 31. Патай
Заказ 3398/50 Тираж 671Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Раушская наб,, д. 4/5
ГIpoиэвoдcтвeннo-пoлIiгpaфичecкoe предприятие, г. Ужгород, ул. Проектная, 4
| УСТРОЙСТВО ДЛЯ СИНТЕЗА ЧЕТЫРЕХЗВЕННЫХ МЕХАНИЗМОВ | 1961 |
|
SU149270A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Моделирующее устройство для расчета стержневых механизмов | 1960 |
|
SU138411A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| г | |||
