(54) СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ СКОРОСТИ
ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ телеуправления подвижным объектом | 1979 |
|
SU877595A1 |
| Способ измерения скорости подвижного объекта и устройство для его осуществления | 1984 |
|
SU1255938A1 |
| Устройство для контроля местоположения подвижного объекта | 1983 |
|
SU1160458A1 |
| Устройство для контроля перемещения и местоположения транспортного средства | 1982 |
|
SU1237532A1 |
| Устройство для телеуправления подвижным объектом | 1979 |
|
SU783829A1 |
| Устройство для контроля местоположения подвижного объекта | 1983 |
|
SU1124365A1 |
| УНИВЕРСАЛЬНЫЙ ВИХРЕТОКОВЫЙ ИМПУЛЬСНЫЙ МЕТАЛЛОИСКАТЕЛЬ | 2013 |
|
RU2559796C2 |
| Устройство для измерения скорости подвижного объекта | 1987 |
|
SU1493954A2 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1256071A1 |
| ГИБРИДНЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДПОВЕРХНОСТНЫХ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ | 2019 |
|
RU2743495C1 |
I
Изобретение относится к телеуправлению ПОДВИЖНЫМИ- объектами и может быть применено на Железнодорожном и промышленном транспорте.
Известен способ бесконтактного измерения скорости подвижного объекта, основанный на. возбуждении двух приемных антенн частотным сигналом с последуюш,им формированием и сравнением их между собой и дифференцировании разностного сигнала.
Известно также устройство для осуществления способа, содержашее генератор возбуждения с передающей антенной и два измерительных канала с приемными антеннами на входах, подключенные ко входам блока сравнения, выход которого связан с блоком дифференцирования 1.
Недостатком известного способа и . ройства является их невысокая точность, обусловленная невозможностью осуществления непрерывного контроля скорости перемещения подвижного объекта.
Цель изобретения - повышение точности измерения скорости подвижного объекта.
Поставленная цель достигается тем, что принятые антенной частотные сигналы преобразуют в потенциальные и сравнение производят по амплитудам этих сигналов.
Кроме того, в устройстве, реализующем предлагаемый способ, приемные антенны выполнены в виде совмещенных рамочных контуров, имеющих на одном конце сужения, расположенные встречно по отношению друг к другу, при этом измерительные каналы выполнены на преобразователях частотного сигнала в потенциальный.
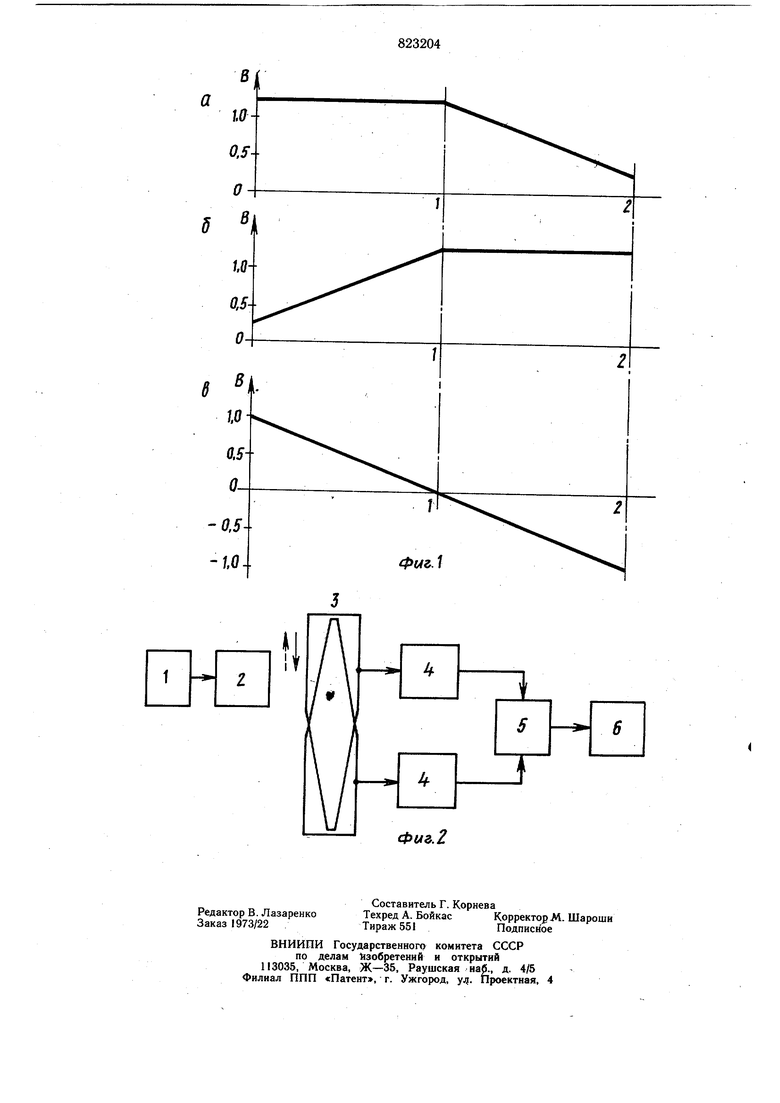
На фиг. 1 изображены статические характеристики (а и б) каждой из приемныхантенн в зависимости от положения подвижного объекта относительно передающей антенны и разностный сигнал (в) с приемных антенн; на фиг. 2 - функциональная
схема устройства, реализующего способ.
Статические характеристики каждой из .-приемных антенн (фиг. 1 а и б) пр дставляют собой потенциальные сигналы, соответствующие возбуждаемым в приемных антеннах частотным сигналам от передающей антенны. Форма характеристики повторяет форму каждого из приемных рамочных контуров. Сигнал (в) разности этих характеристик редставляет линейную функцию, наклон которой зависит от геометрических размеров приемных рамочных контуров. Устройство (фиг. 2) содержит генератор 1 возбуждения с передающей антенной 2 индуктивного канала связи, приемные антенны 3, выполненные в виде совмещенных рамочных контуров, имеющих на одном конце сужения и расположенные встречно по отношению друг к другу, подключенные к измерительным каналам 4, выполненным на преобразователях частотного сигнала в потенциальный, блок 5 сравнения и блок 6 дифференцирования, при этом выход каждой из приемных антенн 3 соединен со входом соответствующего измерительного канала 4, выходы которых присоединены к блоку 5 сравнения, выход которого подключен к блоку 6 дифференцирования. Устройство, реализующее предлагаемый способ, работает следующим образом. При перемещении подвижного объекта в каждой из двух приемных антенн 3 возбуждаются одни и те же по частоте сигналы, но различные по амплитуде. Индуцируемые частотные сигналы в измерительных каналах 4 преобразуются в потенциальные сигналы, пропорциональные амплитудам частотных сигналов. В блоке 5 путем вычитания одного сигнала из другого получают информацию о положении подвижного объекта в каждый конкретньш мс1мент времени. При этом статическая характеристика (в) изменяется линейно. В зависимости от направления движения выходная характеристика с блока 5 сравнения может быть как монотонно убывающей, так и монотонно возрастающей. При равномерном движении подвижного объекта возрастание (убывание) разностного сигнала остается нееизмен1 || поэтому прО; изводная от сигнала будет постоянной величиной, причем либо положительной (при возрастании результирующего сигнала), либо отрицательной (при убывании). Знак сигнала позволяет определить направление перемещения. В случае переменного движения блок дифференцирования позволяет измерять мгновенные значения скорости подвижного объекта. Изобретение обеспечивает повыщение точ ности управления подвижным объектом. Формула изобретения 1.Способ бесконтактного измерения скорости подвижного объекта, основанный на возбуждении двух приемных антенн частотным сигналом с последующим формированием и сравнением их между собой и дифференцировании разностного сигнала, отличающийся тем, что, с целью повышения точности измерения, принятые антенной частотные сигналы преобразуют в потенциальные и сравнение производят по амплитудам этих сигналов. 2.Устройство для осуществления способа по п. 1, содержащее генератор возбуждения с передающей антенной и два измерительных канала с приемными антеннами на входах, подключенные ко входам блока сравнения, выход, которого связан с блоком дифференцирования, отличающееся тем, что приемные антенны выполнены в виде совмещенных рамочных контуров, имеющих на одном конце сужения, расположенные встречно по отношению друг к другу, при этом измерительные каналы выполнены на преобразователях частотного сигнала в потенциальный. Источники информации, принятые во внимание при экспертизе 1. Григорий-Рябов В. В. Радиолокационные устройства (теория и принципы построения). М., «CoBetcKoe радио, 1970, с. 36. рис. 2, 18 (прототип).
