Изобретение относится к автоматизации технологических процессов добычи полезных ископаемых и может быть использовано в системах дистанционного и автоматического управления режимами работы горных машин в частности щитовых агрегатов.
Целью изобретения является повышение производительности, расширение области применения.
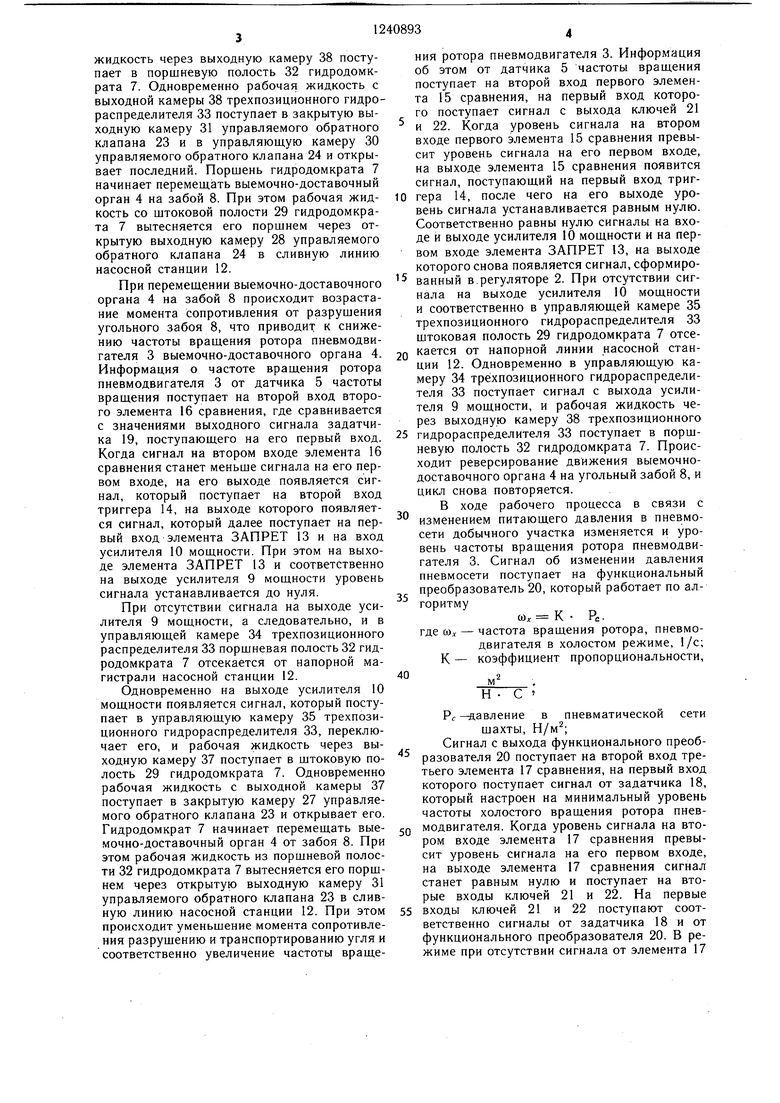
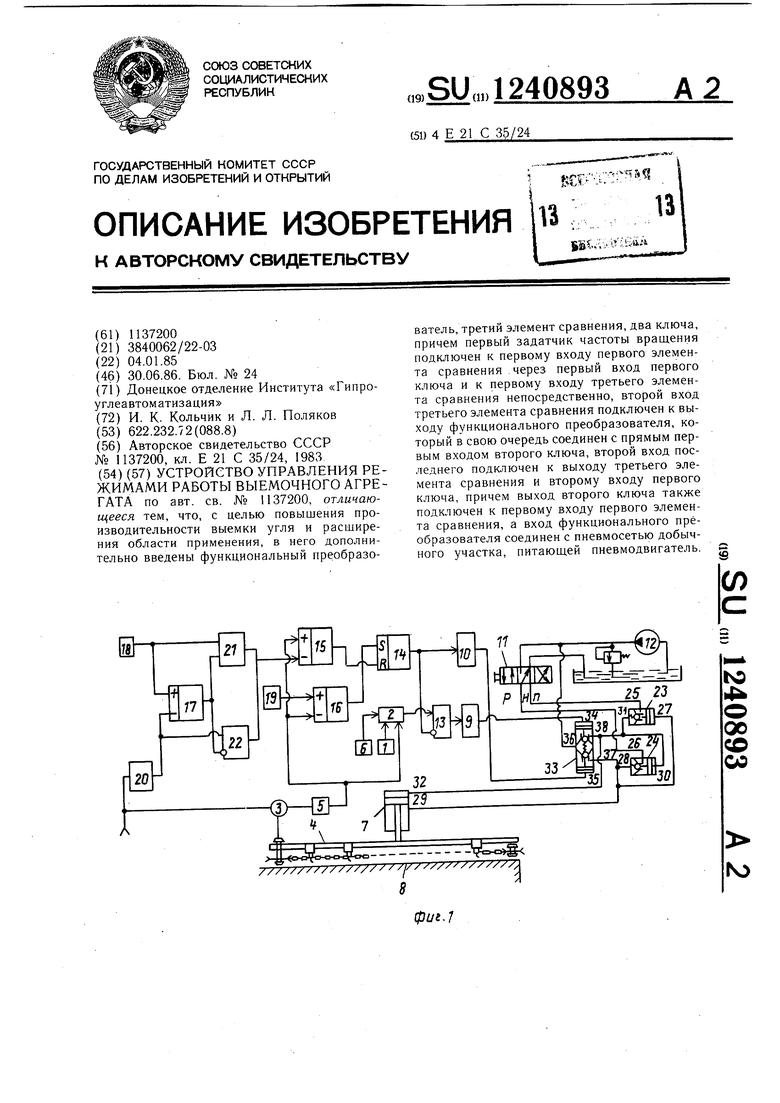
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - времен- ная диаграмма.
Устройство содержит пульт 1 дистанционного управления, регулятор 2, пневмодвига- тель 3, выемочно-доставочный орган 4 с датчиком 5 частоты вращения, соединенный с входом регулятора 2, другой вход которого соединен с задатчиком 6 уставки регулятора 2, гидродомкрат 7 (количество гидродомкратов может быть больше одного и определяется конструктивными особенностями механизма подачи выемочно-доставочно- го органа 4 на забой 8), два усилителя 9 и 10 мощности, гидрораспределитель 11, соединенный с насосной станцией 12, элемент ЗАПРЕТ 13, триггер 14, элементы 15, 16 и 17 сравнения, задатчи- ки 18 и 19 уровней частоты вращения, функциональный преобразователь 20, два ключа 21 и 22, гидравлические управляемые клапаны 23 и 24, входные камеры 25 и 26, которые .соединены соответственно выходными линиями гидрораспределителя 1Ц управляющая камера 27 управляемого обратного клапана 23 соединена с выходной камерой 28 управляемого обратного клапана 24 и со штоковой полостью 29 гидродомкрата 7, а управляющая камера 30 управляемого обратного клапана 24 соединена с выходной камерой 31 управляемого обратного клапана 23 и с поршневой полостью 32 гидродомкрата 7, трехпозицион- ный гидрораспределитель 33, управляющие камеры 34, 35 которого соединены соответственно с выходами усилителей 9 и 10 мощ ности, камера 36 питания трехпозиционно- го гидрораспределителя 33 соединена с напорной линией насосной станции 12, а его выходные камеры 37 и 38 соединены соответственно со штоковой 29 и поршневой 32 полостями гидродомкрата 7.
В позиции Н (нейтраль) гидрораспределителя 11 его напорная линия отсечена от насосной станции 12, а выходные линии соединены с его сливной линией, в позициях П (подача) и Р (реверс) выходные линии гид- рораспределителя 11 соединены соответственно с напорной и сливной магистралями насосной станции 12.
Устройство работает в ручном и в автоматическом режимах.
В ручном режиме оператор щитового аг- регата включает пневмодвигатель 3 выемоч- но-доставочного органа 4 и устанавливает гидрораспределитель 11 в позицию П.
s
0 5 0
0
5
5
5
При этом рабочая жидкость по напорной линии насосной станции 12 поступает во входную камеру 25 управляемого обратного клапана 23, открывает его и через выходную камеру 31 поступает в поршневую полость 32 гидродомкрата 7. Одновременно рабочая жидкость с выходной камеры 31 управляемого обратного клапана 23 поступает в управляемую камеру 30 управляемого обратного клапана 24 и открывает его. Поршень гидродомкрата 7 начинает перемещать выемочно-доставочный орган 4 на забой 8 с определенной скоростью. При этом рабочая жидкость со штоковой полости 29 гидродомкрата 7 вытесняется порщнем через открытую выходную камеру 28 управляемого обратного клапана 24 в сливную линию насосной станции 12.
При достижении неустойчивого режима работы пневмодвигателя 3 оператор устанавливает гидрораспределитель 11 в позицию Р и тем самым реверсирует поток рабочей жидкости, поступающий в гидродомкрат 7. При этом рабочая жидкость по напорной линии насосной станции 12 поступает во входную камеру 26 управляемого обратного клапана 24, открывает его и через его выходную камеру 28 поступает в штоковую полость 29 гидродомкрата 7. Одновременно рабочая жидкость с выходной камеры 28 управляемого обратного клапана 24 поступает в управляющую камеру 27 управляемого обратного клапана 23 и открывает его. Порщень гидродомкрата 7 начинает перемещать выемочно- доставочный орган 4 от забоя 8. При этом рабочая жидкость из поршневой полости 32 вытесняется порщнем гидродомкрата 7 через открытую выходную камеру 31 управляемого обратного клапана 23 в сливную линию насосной станции 12.
При достижении ротором пневмодвигателя 3 оборотов, близких к холостым, оператор устанавливает гидрораспределитель 11 в позицию П, и цикл повторяется.
В автоматическом режиме с пульта 1 дистанционного управления включается пневмодвигатель 2 и запускается схема управления режимами работы. При этом гидрораспределитель 11 находится в положении Н. Выходной сигнал от датчика 5 частоты вращения, соответствующий текущему значению частоты вращения ротора пневмодвигателя 3, поступает на второй вход регулятора 2, где происходит сравнение его с заданным значением частоты вращения, поступающим на его третий вход от задат- чика 6 уставки.
Выходной сигнал регулятора 2 поступает на второй вход элемента ЗАПРЕТ 13, на выходе которого появляется сигнал, поступающий на вход усилителя 9 мощности, на выходе которого появляется усиленный по мощности сигнал, поступающий в управляющую камеру 34 трехпозиционного гидрораспределителя 33, переключает его, и рабочая
жидкость через выходную камеру 38 поступает в поршневую полость 32 гидродомкрата 7. Одновременно рабочая жидкость с выходной камеры 38 трехпозиционного гидрораспределителя 33 поступает в закрытую выходную камеру 31 управляемого обратного клапана 23 и в управляющую камеру 30 управляемого обратного клапана 24 и открывает последний. Поршень гидродомкрата 7 начинает перемещать выемочно-доставочный орган 4 на забой 8. При этом рабочая жидкость со штоковой полости 29 гидродомкрата 7 вытесняется его поршнем через открытую выходную камеру 28 управляемого обратного клапана 24 в сливную линию насосной станции 12.
ния ротора пневмодвигателя 3. Информация об этом от датчика 5 частоты вращения поступает на второй вход первого элемента 15 сравнения, на первый вход которого поступает сигнал с выхода ключей 21
и 22. Когда уровень сигнала на втором входе первого элемента 15 сравнения превысит уровень сигнала на его первом входе, на выходе элемента 15 сравнения появится сигнал, поступающий на первый вход триг10 гера 14, после чего на его выходе уровень сигнала устанавливается равным нулю. Соответственно равны нулю сигналы на входе и выходе усилителя 10 мощности и на первом входе элемента ЗАПРЕТ 13, на выходе которого снова появляется сигнал, сформироПри перемещении выемочно-доставочного ванный в.регуляторе 2. При отсутствии сигнала на выходе усилителя 10 мощности и соответственно в управляющей камере 35 трехпозиционного гидрораспределителя 33 штоковая полость 29 гидродомкрата 7 отсе- 2Q кается от напорной линии насосной станции 12. Одновременно в управляющую камеру 34 трехпозиционного гидрораспределителя 33 поступает сигнал с выхода усилителя 9 мощности, и рабочая жидкость через выходную камеру 38 трехпозиционного
ка 19, поступающего на его первый вход. 25 гидрораспределителя 33 поступает в порш- Когда сигнал на втором входе элемента 16 невую полость 32 гидродомкрата 7. Происоргана 4 на забой 8 происходит возрастание момента сопротивления от разрушения угольного забоя 8, что приводит к снижению частоты вращения ротора пневмодвигателя 3 выемочно-доставочного органа 4. Информация о частоте вращения ротора пневмодвигателя 3 от датчика 5 частоты вращения поступает на второй вход второго элемента 16 сравнения, где сравнивается с значениями выходного сигнала задатчиходит реверсирование движения выемочно- доставочного органа 4 на угольный забой 8, и цикл снова повторяется.
сравнения станет меньше сигнала на его первом входе, на его выходе появляется сигнал, который поступает на второй вход триггера 14, на выходе которого появляется сигнал, который далее поступает на первый вход элемента ЗАПРЕТ 13 и на вход усилителя 10 мощности. При этом на выходе элемента ЗАПРЕТ 13 и соответственно на выходе усилителя 9 мощности уровень сигнала устанавливается до нуля.
При отсутствии сигнала на выходе усилителя 9 мощности, а следовательно, и в управляющей камере 34 трехпозиционного распределителя 33 поршневая полость 32 гидродомкрата 7 отсекается от напорной магистрали насосной станции 12.
Одновременно на выходе усилителя 10 мощности появляется сигнал, который поступает в управляющую камеру 35 трехпозиционного гидрораспределителя 33, переключает его, и рабочая жидкость через выходную камеру 37 поступает в штоковую полость 29 гидродомкрата 7. Одновременно рабочая жидкость с выходной камеры 37 поступает в закрытую камеру 27 управляемого обратного клапана 23 и открывает его.
30
35
40
ходит реверсирование движения выемочно- доставочного органа 4 на угольный забой 8, и цикл снова повторяется.
В ходе рабочего процесса в связи с изменением питающего давления в пневмо- сети добычного участка изменяется и уровень частоты вращения ротора пкевмодви- гателя 3. Сигнал об изменении давления пневмосети поступает на функциональный преобразователь 20, который работает по алгоритму
Регде со - частота вращения ротора, пневмодвигателя в холостом режиме, 1/с; коэффициент пропорциональности,
..2
К
н с
сети
PC давление в пневматической
шахты, Н/м
Сигнал с выхода функционального преоб- разователя 20 поступает на второй вход третьего элемента 17 сравнения, на первый вход которого поступает сигнал от задатчика 18, который настроен на минимальный уровень частоты холостого вращения ротора пневГидродомкрат 7 начинает перемещать вые- гп модвигателя. Когда уровень сигнала на втомочно-доставочный орган 4 от забоя 8. При этом рабочая жидкость из поршневой полости 32 гидродомкрата 7 вытесняется его поршнем через открытую выходную камеру 31 управляемого обратного клапана 23 в сливром входе элемента 17 сравнения превысит уровень сигнала на его первом входе, на выходе элемента 17 сравнения сигнал станет равным нулю и поступает на вторые входы ключей 21 и 22. На первые
ную линию насосной станции 12. При этом 55 входы ключей 21 и 22 поступают соотпроисходит уменьшение момента сопротивления разрушению и транспортированию угля и соответственно увеличение частоты вращения ротора пневмодвигателя 3. Информация об этом от датчика 5 частоты вращения поступает на второй вход первого элемента 15 сравнения, на первый вход которого поступает сигнал с выхода ключей 21
и 22. Когда уровень сигнала на втором входе первого элемента 15 сравнения превысит уровень сигнала на его первом входе, на выходе элемента 15 сравнения появится сигнал, поступающий на первый вход триг0 гера 14, после чего на его выходе уровень сигнала устанавливается равным нулю. Соответственно равны нулю сигналы на входе и выходе усилителя 10 мощности и на первом входе элемента ЗАПРЕТ 13, на выходе которого снова появляется сигнал, сформиро ванный в.регуляторе 2. При отсутствии сиггидрораспределителя 33 поступает в порш- невую полость 32 гидродомкрата 7. Проис
ходит реверсирование движения выемочно- доставочного органа 4 на угольный забой 8, и цикл снова повторяется.
В ходе рабочего процесса в связи с изменением питающего давления в пневмо- сети добычного участка изменяется и уровень частоты вращения ротора пкевмодви- гателя 3. Сигнал об изменении давления пневмосети поступает на функциональный преобразователь 20, который работает по алгоритму
Регде со - частота вращения ротора, пневмодвигателя в холостом режиме, 1/с; коэффициент пропорциональности,
..2
К
н с
сети
PC давление в пневматической
шахты, Н/м
Сигнал с выхода функционального преоб- разователя 20 поступает на второй вход третьего элемента 17 сравнения, на первый вход которого поступает сигнал от задатчика 18, который настроен на минимальный уровень частоты холостого вращения ротора пневмодвигателя. Когда уровень сигнала на втором входе элемента 17 сравнения превысит уровень сигнала на его первом входе, на выходе элемента 17 сравнения сигнал станет равным нулю и поступает на вторые входы ключей 21 и 22. На первые
входы ключей 21 и 22 поступают соответственно сигналы от задатчика 18 и от функционального преобразователя 20. В режиме при отсутствии сигнала от элемента 17
сравнения сигнал от функционального преобразователя 20 проходит через ключ 22 на первый вход элемента 15 сравнения, где сравнивается с сигналом от датчика 5 частоты вращения. Если уровни сигналов на первом и втором входах элемента 17 сравнения будут равными, то на его выходе появится сигнал. Тогда на выходе ключа 21 также появится сигнал, равный выходному сигналу задатчика 18, который проходит на первый вход элемента 15 сравнения, где будет сравниваться с сигналом от датчика 5 частоты вращения.
В предлагаемом устройстве за счет введения дополнительных элементов своевременно производится перестройка уровня задания максимально возможной частоты вращения ротора пневмодвигателя в зависимости от изменений характеристики пневматической сети шахты. Этим значительно расширяется область применения устройства и повышается производительность выемки угля агрегатом. Действительно, при отсутствии предлаш род/с
гаемого устройства в ходе рабочего процесса выемки могут возникнуть три режима (фиг. 2). В первом режиме характеристика пневматической сети шахты постоянна и частота вращения ротора пневмодвигателя в холостом режиме совпадает с уровнем задания максимально-возможной частоты вращения ротора пневмодвигателя. Во втором и третьем режимах характеристика пневматической сети изменяется: вначале частота
вращения ротора в холостом режиме уменьшилась за счет падения давления в пнев- мосети шахты, а затем увеличилась за счет повышения давления в пневмосети, т.е. во втором режиме частота вращения ротора меньше заданной частоты, а в третьем - больше. В первом случае это приводит к неработоспособности устройства в подобных условиях (не произойдет реверс направления движения выемочно-доставочного органа агрегата на забой), что сокращает область
его применения. Во втором случае не будет использован дополнительный запас кинетической энергии при выемке угля.
0) а)х
(лв
.
СОи
IpemuM
иг.г
Шрен(им
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления режимами работы выемочного агрегата | 1983 |
|
SU1137200A1 |
| Устройство управления режимами работы выемочного агрегата для пластов крутого падения | 1986 |
|
SU1320411A2 |
| ГОРНОПРОХОДЧЕСКАЯ МАШИНА С ГИДРОМЕХАНИЧЕСКИМ РАБОЧИМ ОРГАНОМ | 1995 |
|
RU2100598C1 |
| Пневматическое устройство управления многоприводным агрегатом | 1986 |
|
SU1355776A1 |
| Агрегат для выемки крутых пластов угля | 1983 |
|
SU1164437A1 |
| СПОСОБ БУРЕНИЯ ПОРОДЫ С ПЕРЕМЕННЫМИ СВОЙСТВАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2582691C1 |
| ГИДРОСИСТЕМА СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1999 |
|
RU2161254C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНЫМ ЭЛЕМЕНТОМ | 2014 |
|
RU2570679C1 |
| АГРЕГАТ ФРОНТАЛЬНЫЙ ДОЛИНСКОГО АФД, ИСПОЛНИТЕЛЬНЫЙ ОРГАН (ВАРИАНТЫ), ЦЕПЬ КОЛЬЦЕВАЯ, СТАВ АГРЕГАТА, МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПО ГИПСОМЕТРИИ, СЕКЦИИ КРЕПИ, ПЕРЕКРЫТИЕ, КРЕПЬ ВАНДРУТНАЯ, ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ, ПЕРЕГРУЖАТЕЛЬ (ВАРИАНТЫ), ГИДРОДВИГАТЕЛЬ ДЛЯ ЭМУЛЬСИИ, СРЕДСТВО УПРАВЛЕНИЯ, СРЕДСТВО КОНТРОЛЯ ГРАНИЦЫ "УГОЛЬ-ПОРОДА", СПОСОБЫ МОНТАЖА И САМОМОНТАЖА | 1996 |
|
RU2114996C1 |
| Устройство управления режимами работы выемочного агрегата | 1983 |
|
SU1137200A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
