1
Изобретение относится к автоматизации технологических процессов добычи полезных ископаемых, может быть использовано в системах дистанционного и автоматического управ ления режимами работы горных машин, в частности 1щ-гговых -агрегатов.
Известно устройство управления режимами работы выемочного ai-peraтау реализу адее способ, основанный на стабилизации мощности путем изменения скорости вращеьшя привода по гиперболическому закоьгу от момента сопротивления, который измеря- ют и используют полученную инфор- . ма1,ию при изменении уставки по скорости вращения привода .pj .
Недостатками даш-ых способа и устройства являются невозможность дальнейшего повьшения производительности агрегата и необходаЕмость постоянного присутствия человека в забое при выемке угля,
.Наиболее близким по технической сущности и достигаемому результату к изобретению является устройство управления реж11мами работы выемочного агрегата, содержаи ее гидродомкрат механизма подачи выемочно-доставоч- ного органа, два усилителя мощности гидрораспределитель,, соединенный с насосной станцией, пульт дистат1,ионно-го управления, соединенный с первым входом регулятора, пневмонривод выемочно-достаточного органа с датчиком частоты вращения, выход которого подключен к второму входу регулятора, третий выход которого соединен задатчиком уставки регу лятора 2J .
Недостатком известного устройства является гшзкая кинетическая энегия отбойки угля приводящая к частным остановкам выемочно-доставочно- го органа..
Цель изобретет-ш - повышение кинетической энергии при отбойке угля
Постакгсенная цель достигается тем, что устройство управления релш мамн работы выемочного агрегата, содерлсащее гидродо жрат механизма подачи выемочно-доста}зочного органа два усилителя мощности, гидрораспределитель, соединенный с насосной станцией, пульт дистанционного управлершя, соединенный с первым входом рег лятора,пневмопривод выемочно--доставЬчного органа с датчиком частоты вращения, выход которого
372002
подключен к второму входу регулятора, третий вход которого соединен с задатчиком уставки регулятора, снабжено двумя задатчиками частоты 5 вращения, двумя элементами сравнения, триггером, элементом ЗАПРЕТ, трехпозиционным гидрораспределителем и двумя управляемыми обратными клапанами, причем первый задатчик часто0 ты вращения подключен к первому входу первого элемента сравнения, выход которого соединен с первым входом триггера, выход которого соединен с входом первого усилителя мощности
5 и с первым входом элемента ЗАПРЕТ, выход, которого связан через второй усилитель мощности с первой управляющей камерой трехпозиционного гидрораспределителя, камера нитария кото-
0 ррго соединена с напорной линией
насосной станции и с входом гидрорас- нределителя, второй задатчик частоты вращения подключен к первому входу второго элемента сравнения, выход.
5 которого соединен с вторым входом триггера, выход первого усилителя мощности связан с второй управляющей камерой трехпозиционного гидрорас- пределителя, а выход датчика частоты
Q вращения coeдIiнeн с вторыми входами обоих элементов сравнения, при этом оба выхода гидрораспределителя свя. заны каждыР в отдельности с входными камерами управляемых обратнь х клапанов, выходная камера первого управляемого обратного клапана подключена к управляющей камере второго управляемого обратного клапана, к первой выходной камере трехпози- ционного гидрораспредепителя и к поршневой полости гндродомкрата механизма подачи, а выходная камера . второго управляемого обратного клапана подключена к управляющей камере первого управляющего обратного клапана, к второй выходной камере трехпозиционного гидрораспределителя и к щтоковой полости гидродомкрата механизма подачи, причем выход регулятора соединен с вторым входом эле-
мента ЗАПРЕТ.
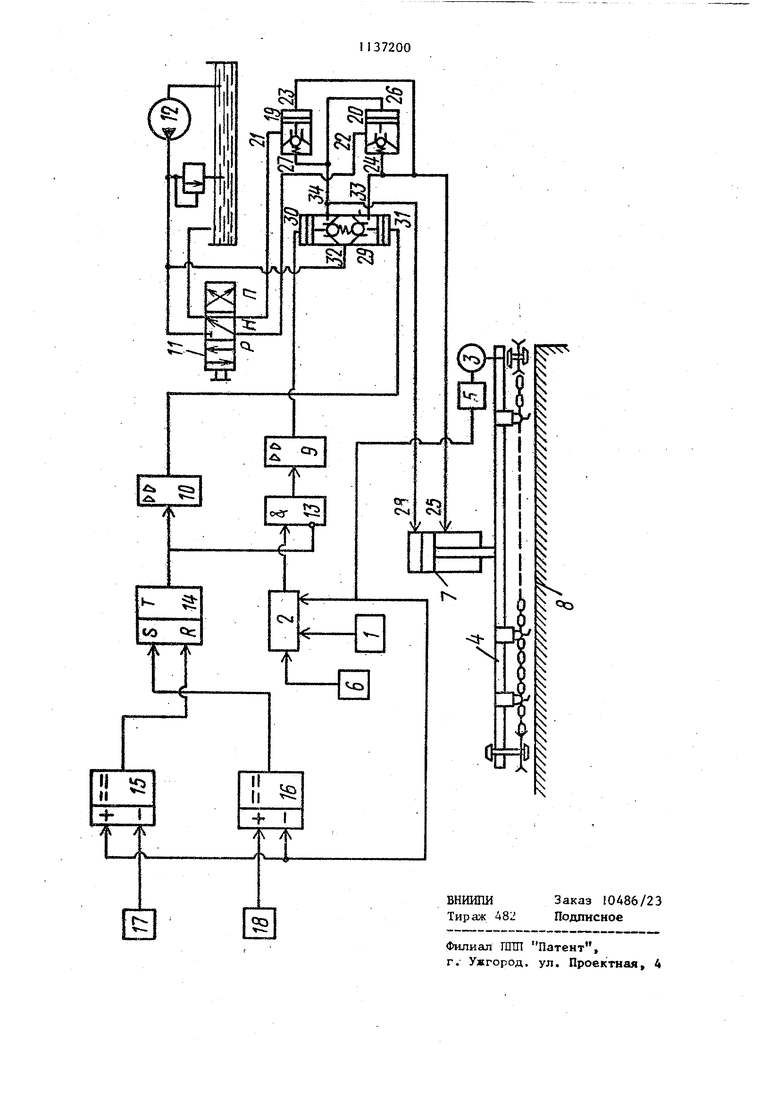
На чертеже представлена функциональная схема предлагаемого устройства.
Устройство содержит пульт дистанционного управления 1, регулятор 2, пневмодвигатель 3 выемочно-доставочного органа 4 с датчиком час- ТОТЫ вращения 5, соединенный с входом реа глятора 2, другой вход которого соединен с задатчи-ком уставки б регулятора 2, гидродомкрат 7 j количество гидродомкратов может быть больше одного и определяется конструктивными особенностями механизма подачи выемочно-доставочного. органа 4 на забой 81, два усилителя мощности 9 и 10, гидрораспределител 11,соеданенный с насосной станцией 12,элемент ЗАПРЕТ 13, триггер 14, элементы -сравне шя 15 и 16, зaдaт ш- ки 17 и 18 уровней частоты вращения гидравлические упраипяемые обратные клапаны 19 и 20, входные камеры 21 и 22 которых соединены соответственн с выходными линия м гидрораспредели- теля 11, управляющая камера 23 управляемого обратного клапана 19 сое- дннена с выходной камерой 24 управля емого обратного клапана 20 и со штоковОй полостью 25 гидродомкрата 7, а управляющая камера 26 управляемого обратного ютапана 20 соединена с выходной камерой 27 управляемого обратного клапана 19 и с поршневой 28 полостью гидродомкрата 7, грехпозиционный гидрораспределитег1ь 29, управляющие камеры 30 и 31 которого соединены соответственно с выходами усилителей мощности 9 и 10, камера питания 32 трехпозиционного гидрораспределителя 29 соединена с напорной линией насосной станции 12, а его выходные камеры 33 и 34 соединен соответственно со штоковой 25 и порш невой 28 полостями гидродомкрата 7. В позиции Н (нейтраль) гидрорас- пределителя 11 его напорная линия от сечена от насосной станции 12, а выходные линии,соединены с его.сливHoii линией, в позициях (подача) и (реверс-) Выходные лиш1и гидрорас- пределителя 11 соединены соответственно с напорной и сливной магистралями .насосной станции 12.
Устройство работает в двух режимах: в ручном и автоматическом.
В ручном режиме оператор щитового агрегата в.ключает пневмодвигатель 3 выемочно-доставоч1юго органа 4 и устанавливает гидрораспределитель 11 в позицию If .
При этом рабочая жидкость по на.порнрй линии насосной станции 12
В автоматическом режиме с пульта дистанционного управления 1 включается пневмодвигатель 3 и запускается схема управления режимами работы. При этом гидрораспределитель 1 I наХОДД1ТСЯ в положении Н . й)1ходной сигнал от датчика частоты вращения 5, соответствующпТ текущеьту значению частоты вращеш-1я ротора пневмодви гател я 3, поступает иа второй вход ре- 00 поступает во входную камеру 21 управляемого обратного клапана 19,. от-, крывает его и через выходную камеру 27 поступает в поршневую полость 28 гидродо крата 7.Одновременно рабочая жидкость с выходной камеры 27 управляемого обратного клапана 19 поступает, в управляеь-гую камеру 26 управляемого обратного клапана 20 и открывает его. Порщень гидродомкрата 7 начинает перемещать выемочно-доста- вочный орган 4 на забой 8 с определенной скоростью. При этом рабочая жидкость со штоковой полости 25 гид- родомкрата 7 вытесняется поршнем через открытую выходную камеру 24 управляемого обратного клапана 20 в сливную линию насосной станции 12. При достижении неустойчивого режима работы пневмодвигателя 3 оператор устанавливает ггщрораспределитель 1 1 в ПОЗИЦ1ПО Р , тем самым реверсирует поток рабочей жидкости, поступающей в гидродомкрат 7. При этом рабочая жидкость по напорной линии насосной станции 12 поступает в входную камеру 22 управляемого обратного клапана 20, открывает его и через его выход гую камеру 24 поступает в штоковую полость 25 гидродомкрата 7. Одновременно рабочая жидкость с выходной камеры 24 управляемого обратного клапана 20 поступает в управляющую камеру 23 управляемого обратного клапана 19 и открывает его. Поршень гидродомкрата 7 начинает перемещать выемочно-доставочный орган 4 от забоя 8. При этом рабочая жидкость из поршневой полости 28 вытесняется поршнем гидродомкрата 7 через открытую выходную камеру 27 управляемого обратного клапана 19, в ашвную линию насосной станцг-п 12. При достижении ротором пневмодви- гат;у;5 3 оборотов, близких к холос- . тымч оператор устанавливает гидро- распределитель 1 1 в позицию 1Г и цикл повторяется,
S.1
гулятора 2, где происходит сравнение его с заданшлм значершем частоты вращения, поступающ.гс- иа его третий вкод от задатчика уставгси 6. Выходной .ал регулятора 2 поступает на второй вход элемента ЗАПРЕТ 13, на выходе которого появляется сигнал, поступающий на вход усилителя мощности 9, на выходе-которогго пояачяется усиленшлй но мощности сигнал, лоступающ-ш- в управляющую каь-iepy 30 трехпозиционного гидрораспределителя 29 переключает eiOj и рабочая жидкость через выходную камеру 34 поступает ,в -поршневую полость 28 гид родом крат а 7. Одновременно рабочая лчидкость с выходной камеры 24 трехпозицион.пого гидрораспределитачя 29 поступает в закрытую )н-лход,ную камеру 27 управляемого обратного к. 19 и в управляющую камару 26 управляемого обратного клапана 20 и открь вает последний. Поршень ги.цродомкрата 7 начинает переме1.дат15 выемочно-доставочный орган 4 па забой 8, При этом рабочая жидкость со ктоковой полости 25 гидродомкра- та 7 вытесняется его поршнем через открытую в лходпую камеру 24 управляемого обратного клапана 20 в. сливную линию насосной станции 12.
rtpii перемещении выемочпо-доставочного органа 4 на забой 8 происходит возрастание момента сопротивления от разрушения угольного забоя 8, что приводит к сю жению частоты вращекия i: oropa nнen :oдпигaтeля 3 выемоик.5-д,оставочного органа 4. Инфор- маД,я о частоте вращенр н ротора пне);;модви1ателя 3 от датчика частоты вращсппя 5 поступает на второй вход второгО эле {анта сравнения 16, где, сравнивается со значениями выходного ситгпла задатчиг.а поступающего на его пе)ВЬ1Й вход. Когда сигнал на втором )j;;,c,i,i,i:i элемента сравнеш Я 16 стаиеч )--;ле cjiiHiUia на его первом входо, иа егО выходе поя}5ляется сигHiUi, ,коти(,-и:1й jjocTynaeT на з ггорой вход Tpin jepa 1ч, на выхода которого иояз ;лечся сигнал, который далее поступа-гг ;га вход элемента ЗАПРЕТ 13 и аа вход у;:;1 :П те,ля мо уюсти 0. При на ; ыходе эле.1еита ЗАПРЕТ 3 л соответствепно на выходе ycnjasTCJUi; MiDiuracT; 9 урогмпш сигнала усгаиаг 1иц,1ется до пуля.
72006
При отсутствии сигнала на выходе усилителя мощности 9р а соответственно и в управляющей камере 30 трехпозидионного распределителя 29 порш- 5 невая полость 28 гидродомкрата 7 отсекается от напорной магистрали насосной станции 12.
Одновременно на выходе усилителя мощности Ш появляется сигнал, кото-
0 рьй поступает в управляющую камеру 31 трехпозиционного гидрораспределнтеля 29, Переключает его, и рабочая жидкость через выход 1ую камеру 33 поступает в штоковую полость 25 гид5 родомкрата 7, Одновременно рабочая хащкость с выходной камеры 33 поступает в закрыту о выходную камеру 24 управляемого обратного icrranana 20 и в управля;ои.1у1о камеру 23 управляв-
0 МОго обратного ютапана 19 и открывает последний. Гидродонкрат 7 начинает перемед,ать пыемочно-доставочпый орган 4 от забоя, 8. При этом рабочая жидкость из поршневой нолости 28 гид5 родомкрата 7 вытесняется его поршней через открытую выходную камеру 27 управляемого обратного клапана 19 в сливную линию насосной стандии 12. При этом гфоисходит уменьшение мепта сопротивления разрушению угля и соответственно увеличение частоть вращения ротора пневмодвигателя 3. Информация об этом от частоты вращегшя 5 поступает на второй вход первого элемента сравнения 15. Когда уровень иа парвом входе первого элемента сравне1шя 15 превысит уровень сигнала на его втором входе, на выходе элемеггга сравнения 15 появится сигн;ш, поступаюмпгй на первый вход триггера 14, после чего на его выходе уровень сигнала уста- павлив.ается равным нулю. Соответствен)Ю равны нулю сигналы на входе и выходе усилителя мощности 10 и на
первом входе элементгг ЗАПРЕТ 13, на выходе которого снова появляется сигпал, сформированный в регуляторе 2. При отсутствии сигнала на выходе
усилителя мо;цности 10 соответственно
п..,
и в управляющей кгтмере J трехпози-
ционного гид 5ораспределителя 29 штокова.. полость 25 гпдоодог крата 7 отсекается от наиоргюй линии насосной станции 12. Одновременно в управляго щую камеру 30 трехпозиционного гидрораспределителя 29 поступает сигнал с выхода усилителя мощности 9, и рабочая жидкость через выходную камеру 71 34 трехпозиционного гидрораспредели- теля 29 поступает в поршневую полост 28 гидродомкрата 7. Происходит реверсирование движения выемочно-доставочного органа 4 на угольный забой 8, и цикл снова повторяется. В ходе рабочего процесса скорость движения выемочно-доставочного органа на- забой регулируется по закону, формируемому регулятором в зависимости от отклонения частоты вращения ротора пневмодвигателя от ее заданной величины. При движении выемочно-доставочного органа на угольный забой происходит увеличение момента сопро ивпения от разрушения и транспортирования угля, что приводит к снижению частоты вращения ротора пневмодвигателя. При достижении ротором пневмодвигателя значения частоты вращения, близкого к границе устойчивости, устройство реверсирует направление движе1шя выемочно-доставочного органа, при этом отключается воздействие регулятора на формирование скорости движения. В период реверсирования проис0ходит уменьшение момента сопротивления от разрушения угля и соответственно увеличение частоты вращения ротора пневмодвигателя, что приводит к увеличению скорости транспортирования разрушенного угля. При достижении значения частоты вращения ротора пневмодвигателя, близкого к холостому режиму, снова происходит реверсирование направления движения выемочно-доставочного органа на забой и включается воздействие регулятора на характер движения. Цикл управления повторяется. Полученную при этом допал1штель- . ную кинетическую энергию ротора пневмодвигателя и выемочно-доста- вочного органа используют для разрушения и транспортирования угля. Таким образом, использование предложенного устройства позволяет повысить производительность выемки угля за счет иcпoльзoвaшiя дополнительно накопленной кинетической энергии и обеспечить устойчивую работу пнев- модвигателя выемочно-доставочного органа.
г-n s&
Г:: гЖ fc Jil
Э:
Iff
Nl
лг-sa
v/v
fr
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления режимами работы выемочного агрегата | 1985 |
|
SU1240893A2 |
| Устройство управления режимами работы выемочного агрегата для пластов крутого падения | 1986 |
|
SU1320411A2 |
| ГОРНОПРОХОДЧЕСКАЯ МАШИНА С ГИДРОМЕХАНИЧЕСКИМ РАБОЧИМ ОРГАНОМ | 1995 |
|
RU2100598C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНЫМ ЭЛЕМЕНТОМ | 2014 |
|
RU2570679C1 |
| Пневматическое устройство управления многоприводным агрегатом | 1986 |
|
SU1355776A1 |
| СПОСОБ БУРЕНИЯ ПОРОДЫ С ПЕРЕМЕННЫМИ СВОЙСТВАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2582691C1 |
| Агрегат для выемки крутых пластов угля | 1983 |
|
SU1164437A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1989 |
|
SU1680858A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
| АГРЕГАТ ФРОНТАЛЬНЫЙ ДОЛИНСКОГО АФД, ИСПОЛНИТЕЛЬНЫЙ ОРГАН (ВАРИАНТЫ), ЦЕПЬ КОЛЬЦЕВАЯ, СТАВ АГРЕГАТА, МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПО ГИПСОМЕТРИИ, СЕКЦИИ КРЕПИ, ПЕРЕКРЫТИЕ, КРЕПЬ ВАНДРУТНАЯ, ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ, ПЕРЕГРУЖАТЕЛЬ (ВАРИАНТЫ), ГИДРОДВИГАТЕЛЬ ДЛЯ ЭМУЛЬСИИ, СРЕДСТВО УПРАВЛЕНИЯ, СРЕДСТВО КОНТРОЛЯ ГРАНИЦЫ "УГОЛЬ-ПОРОДА", СПОСОБЫ МОНТАЖА И САМОМОНТАЖА | 1996 |
|
RU2114996C1 |
УСТРОЙСТВО УПРАВЛЕНИЯ РЕБШМА1-1И РАБОТЫ ВЫЕМОЧНОГО. АГРЕГАТА, содержащее гидродомкрат механизма подачи выемочио-до.ставочного органа, два усилителя мощности, гидрораспределитель, соедииеньшш с Насосной станцией, пульт д5 стани,иоиного управления, соединенный с первым входом регулятора, пневмопривод выемочно-дос- тавочного органа с датчиком частоты . вращения, выход которого подключен к BTopoNry .входу регулятора, третий вход которого соединен с задатчиком уставки регулятора, о т л и ч а ю и; е е с я тем, что, с целью повышения кинетическ1ой энергии при отбойке, угля, устройство снабжено двумя задат- частоты враще пш, двумя элеM.eHTSivUi сравнеге1я, триггером, элементом , трехпозициониым гидро- распред&гштелем и упраачяемыми обратными клапанами, причем первый задатчик частоты вращегшя подключен к первому входу первого элемента сравнения, выход которого соединен с первым входом триггера, выход которого соединен с вxoдo( первого усилителя мощности и с первым входом элемента ЗАШ-ЕТ, выход которого связан через второй усилитель мо1щости с пер вой управляющей камерой трехпозицион- ного гидрораспределителя, камера питания которого соед1И ена с напорной линией насосной станции и с входом гидрораспределителя, второй задат- 4I-IK частоты вращеьмя подключен к пepвo y второго элемента сравнения, выход которого соединен с вторым входом триггера, выход -первого усилителя мощности связан с второй упрааг1ЯЮЕ;ей )ерой трехпозиционного гидрораспределителя, а выход датчика частохы вращения соединен с вторыми вxoдaм i обоих элементов сравнения, при этом оба выхода гиД1эораспределителя связаны каждый в отдельности с входньп-П камераьш ynpaBjiHeNbix обрат- й.х клапанов, выходная ка.мера первого упраат яемого обратного клапана подключена к управляющей камере второго упрасляс.;.;u о обратного клапана, к nepiCiT выходной камере трехпозициониога гидрораспределителяи к поршнеГО вой полости 1идродомкрата меха1шзма подач ;, а выходная камера второго управляемого обратного клапапа подютючена к управляющей камере первого обратного клапана, к второй выходной камере трехпозиционного гидрорас- пределителя и к штоковой полости гид- родомкрата механизма подачи, причем выход регулятора соединен с вторым входом элемента .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ГОРНЫХ МАШИН | 0 |
|
SU303432A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Под ред | |||
| Б.Ф | |||
| Братченко | |||
| М., Недра., 1976, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
