1
Изобретение относится к автоматике и вычислительной технике, в частности к микропрограммным устройствам управления, и может быть использовано в цифровых вычислительных системах, а также в терминальной аппаратуре .:
.Цель изобретения - повышение достоверности функционирования путем осуществления контроля хода выполнения различных типов микропрограмм.
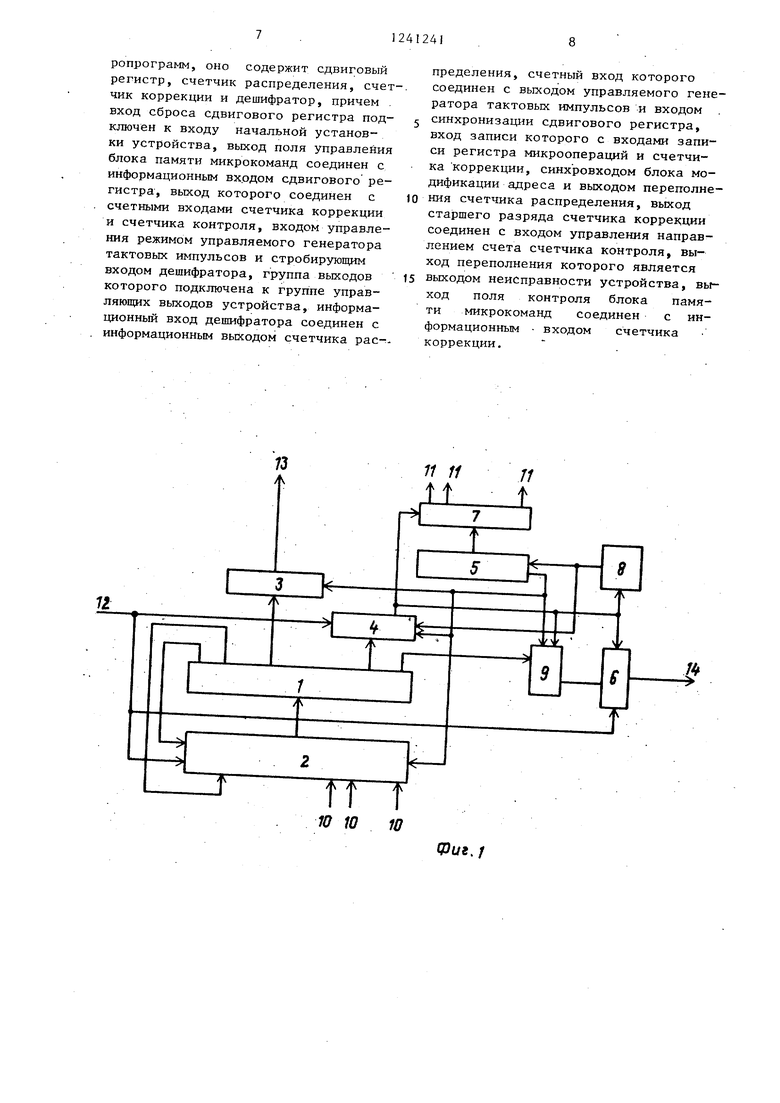
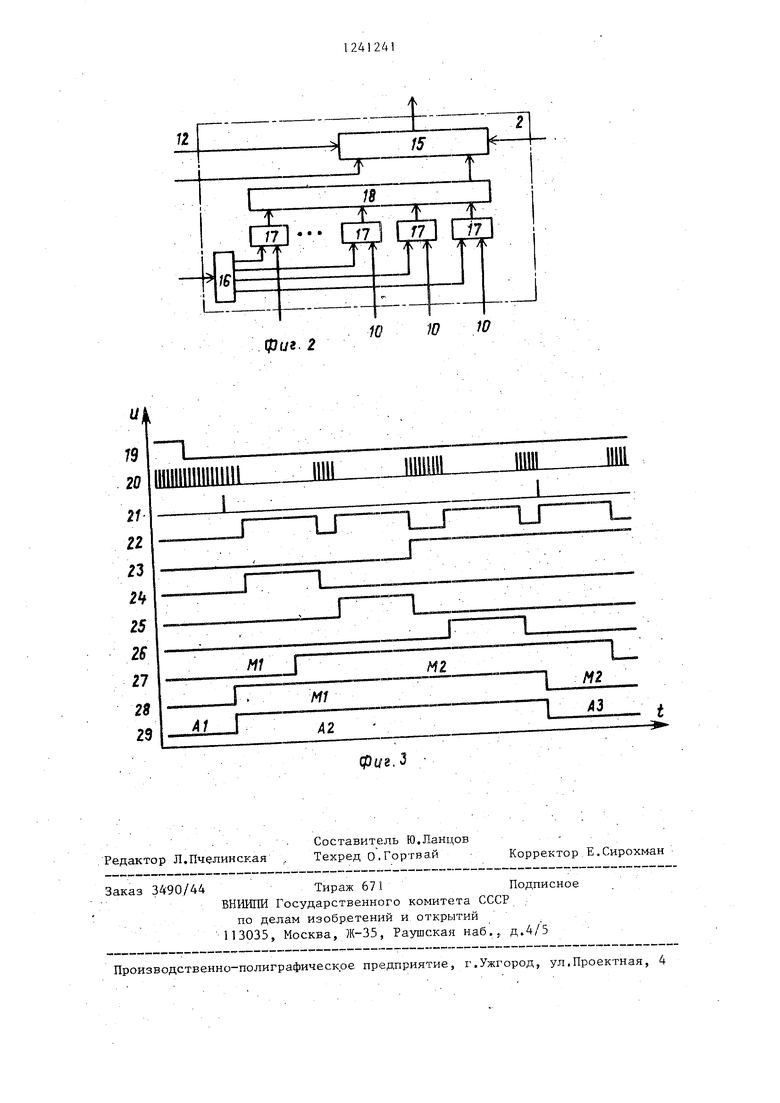
На фиг.1 изображена схема предлагаемого устройства; на фиг. 2 - схема блока модификации адреса; на фиг. 3 - временная диаграмма работы устройства.
Микропрограммное устройство управления содержит блок 1 памяти микрокоманд, блок 2 модификации адреса,, регистр 3 микроопераций, сдвиговый регистр 4, счетчик 5 распределения, счетчик 6 контроля, дешифратор 7, управляемый генератор 8 тактовых импульсов, счетчик 9 коррекции,- группу входов 10 условий, группу управляющих выходов 11, вход 12 начальной установки, выход 13 кода операций и выход 14 неисправности.
Блок 2 модификации адреса образуют регистр 15 адреса, дешифратор 16 группа элементов И 17, элемент ИЛИ- 18.
На фиг.З позицией 19 показан сигнал на входе 12 начальной установки устройства, 20 - импульсы на выходе управляемого генератора 8, 21 - импульсы на выходе переноса счетчика 5 распределения, 22 - сигнал на выходе сдвигового регистра 4, 23 - сигнал на выходе старшего разряда счетчика 9 коррекции; 24 - 26 - сигналы на четвертом, девятом и восемнадцатом управляющих выходах 11 устройства соответственно, 27 - сигнал кода микрокоманды на выходе блока 1 памяти микрокоманд, 28 - сигнал кода микрокоманды на выходе регистра 3 и 29 - сигнал адреса на выходе блока 2 модификации адреса.
Микропрограммное устройство управ ления работает следующим образом.
Для приведения устройства в исходное состояние подается сигнал 19, в результате чего сдвиговый регистр 4, счетчик 6 контроля и регистр 15 адреса устанавливаются в О. По нулевому адресу А1 (29) из блока 1 памяти микрокоманд считывается пер41241
вая микрокоман:да Ml (27). Формат каждой микрокоманды состоит из поля адреса, поля перехода,поля микроопераций, поля управления и поля контроля.
5 В поле адреса указывается адрес следующей микрокоманды. Поле адреса поступает на первый информационный вход блока 2 модификации адреса. Поле перехода определяет тип пе 0 рехода (условный или безусловный) в миБгропрограмме. Поле перехода поступает на управляющий вход блока 2 модификации адреса. Если содержимое поля перехода равно нулю, переход
5 к следующей микрокоманде осуществля- . ется безусловно. В этом случае единичным -сигналом с выхода дешифратора 16 открывается первый элемент И , 1 7 ,, и на информационный вход млад20 шего разряда регистра 15 адреса поступает младший разряд поля адреса микрокоманды.
При условном переходе по н енуле- вому коду в поле перехода дешифра2 . тор i 6 подключает на информационный
вход младшего разряда регистра 15 - адреса сигнал условия с одного из входов 10 устройства.
В поле микроопераций указывается
30 код операции, которую выполняют операционные схемы, управляемые данным микропрограммным устройством управле- НИН. Поле операций поступает на информационный вход регистра.
31J В поле управления задается набор микроприказов,, при выдаче которых осуп ествляется выполнение операции, указанной в поле операций. Поле управления поступает на информационный
40 вход сдвигового регистра 4.
Б поле контроля содержится код, при использовании которого проводится контроль хода вьшолнения микро- програм1 1ы. Поле контроля поступает
45 на информационный вход счетчика 9 коррекции.
После выдачи сигнала 19 сигнал 22 на выходе сдвигового регистра 4 имеет нулевое значение, в результа- 50 те чего частота импульсов 20 на выходе управляемого генератора 8 имеет максимальное значение. Счетчик 5 производит счет с максимальной частотой и после переполнения вырабаты- 55 вает сигнал 21. По сигналу 21 соответствующие поля микрокоманды Ml записываются в регистр 3, сдвиговый регистр 4 и счетчик 9 коррекции (28),
а в регистр 15 адреса записывается сформированный адрес А2 микрокоманды М2 (29).
Например, дпя выполнения микрокоманды Ml необходимы три микротакта. Причем в течение первого, второго и третьего микротактов единичный сигнал должен присутствовать, например на четвертом, девятом и восемнадца - том управляющих выходах 10 устройства соответственно. Вследствие этого в четвертом, девятом и восемнадцато разрядах поля управления микрокоманды Ml присутствуют 1, а в остальных разрядах О.
По сигналу 20 счетчик 5 начинает счет с нулевого значения, а сдвиговый регистр 4 производит сдвиг в строну младших разрядов содержащегося в нем поля управления микрокоманды Ml.
Пока производится сдвиг первого, второго и третьего разрядов поля управления микрокоманды Ml, сигнал 22 имеет нулевое значение и импульсы 20 вырабатываются с максимальной чатотой. При поступлении на выход сдвига сдвигового регистра 4 четвертого разряда поля управления сигнал 22 принимает единичное значение.
В результате этого управляемый генератор 8 изменяет частоту следования импульсов 20 до значения, необходимого для исполнения микротактов микрокоманд.
Сигналом 22 стробируется дешифратор 7, К этому времени счетчик 5 уже содержит код четверки, по которому единичный сигнал 24 вьфабатывается на Четвертом выходе дешифратора 7 и поступает на четвертый управляющий выход 11 устройства.
После отработки первого микротакта импульсом 20 производится очередной сдвиг в сдвиговом регистре 4, и сигнал 22 принимает нулевое значение. Управляемый генератор 8 опять вырабатывает импульсы 20 с максимальной частотой.
После поступления на выход сдвига сдвигового регисгра 4 девятого разряда поля управления сигнал 22 принимает единичное значение. Изменяется частота следова:ния импульсов 20. Счетчик 5 к этому времени досчитывает до кода девяти, и сигнал 25 поступает с выхода дешифратора 7 на
А12414 девятый управляющий выход 1I устройства.
После отработки второго микроприказа импульсом 20 производится сдвиг 5 сдвигового регистра 4 и сигнат: 22
принимает нулевое значение. Управляемый генератор 8 вырабатывает импульсы 20 с максимальной частотой до тех пор, пока восемнадцатый разряд поля 10 управления не поступит на выход сдвига сдвигового регистра 4. Сигнал 22 аналогично принимает единичное значение, в результате чего вырабатыва- ется сигнал 26.
5 После отработки последнего третьего микроприказа содержимое сдвигового регистра 4 оказывается равным нулю. Поэтому при дальнейшем поступлении импульсов 20 сигнал 22 единично- 20 го значения не принимает.
Счетчик 5 переполняется и сигналом 21 в регистр 3, сдвиговый регистр 4 и счетчик 9 записываются поля микрокоманды М2, а в регистр 15 25 адреса записывается сформированный адрес A3 микрокоманды ИЗ.
Исполнение микрокоманды М2 и последующих микрокоманд производится аналогично исполнению микрокоман- 0 ДЫ Ml.
По мере выполнения каждой микрокоманды сигналом 22 производится счет счетчиков 9 коррекции и 6 контроля. Счетчик 6 контроля является реверсив- ным счетчиком, и его счет производит-- ся то с прибавлением, то с вычитанием. Управление режимом счета с прибавлением или вычитанием счетчика 6 контроля осуществляется сигналом с 0 вькода старшего разряда счетчика 9 коррекции. Счетчик 9 коррекции является вычитающим .счетчиком. В процессе выполнения микрокоманд в счетчик 9 коррекции записывается поле контроля каждой микрокоманды. Структура поля контроля и его назначение поясняется при помощи таблицы,
Поле контроля | Назначение
-Старший I разряд Задается начальный 0режим счета счетчика 6 контроля в микрокоманде
Младшие разряды Указывается количество тактов счета
5счетчика 6 контроля
в микрокоманде для начального режима счета .
Единица в старшем разряде- поля контроля указывает на счет с /трибав- лением счетчика 6 контроля, а ноль - на счет с вычитанием. При занесении полей контроля микрокоманд в счетчик 9 коррекции старший разряд поля контроля поступает на управляющий вход счетчика 6 контроля. Б одной микрокоманде, например, задается режим счета счетчика 6 контроля с прибавлением, а в другой - с вычитанием с учетом того, чтобы после выполнения всей микрокоманды, т.е. после прибавления к содержимому счетчика 6 контроля или вычитания из него числа единиц в соответствии с количеством выдаваемых микроприказов, счетчик 6 контроля не обнулялся и не переполнялся.
Если режим счета счетчика 6 контроля во время выполнения микрокоманды производится без коррекции, млад- шие разряды в поле контроля этой микрокоманды имеют единичное значение.
Для более гибкого управления .ре- жимом счета счетчика 6 контроля воз- .можна коррекция режима счета счет- чика 6 контроля во время исполнения одной микрокоманды,
В этом случае в младших разрядах поля контроля указывается гшсло тактов, которое отсчитывается счетчиком 6 контроля в соответствии с режимом, первоначально заданным в старшем разряде поля контроля. Счетчик 9 коррекции производит счет одновременно со счетчиком 6 контроля. После отсчета заданного количества тактов значение старшего разряда на выходе счетчика 9 коррекции изменяется., на противоположное и счетчик 6 контроля производит счет в противоположном режиме . .
П р им е р 1. Выполнение микрокоманды состоит-ИЗ трех тактов, пр и- чем в первых двух тактах счетчик 6 контроля считает с вычитанием, а в третьем - с прибавлением. В этом случае в поле контроля имеется двоичный код 00...001. Сигнал 23 имеет нулевое значение. После вычитания из содержимого счетчика 9 коррекции двойки в счетчике9 коррекции остается код 1 1..0 1 1 1. Сигнал 23 принимает единичное значение.
.П р и м е р 2. Выполнение микрокоманды состоит из пяти тактов, причем в первых четырех тактах счетчик 6 контроля ведет счет с прибавлением, а в пятом - с вычитанием. В этом случае в поле- контроля имеется код 10...011. После отсчета четырех тактов в счетчике 9 коррекции остается
код О ... 1 П , ilo мере выполнения каждой микрокоманды производится счет счетчика 6 контроля причем содержимое счетчика 6 контроля линейно возрастает (при прибавлении), не
доходя до переполнения, а затем ли- нейцо убывает (при вычитании), не доходя до заема.
Если правильный ход выполнения микропрограммы нарушается, то нарушается и контролируемый режим счета счетчика 6 контроля, в результате чего он вырабатывает сигналы переноса и заема. При этом сигнал переноса (заема) поступает с выхода переполнения счетчика 6 контроля на выход 14 устройства, сигнализируя об ошибке.
Формула изобретения
Микропрограммное устройство управления, содержащее блок памяти микрокоманд, блок модификации адреса, регистр микроопераций, счетчик контроля и управляемый генератор тактовых импульсов, причем выход блока модификации адреса соединен с адресным входом блока памяти микрокоманд, выходы поля адреса и поля перехода которого соединены соответственно с первым; информационным входом и входом управления модификацией блока модификации адреса, выход поля микрооперации блока памяти микрокоманд
соедив:ен с информационным входом
регистра микроопераций, выход которого соединен с выходом кода операции устройства, второй информационный вход блока модификации адреса подклю чен к. входу усхювий устройства, вход
начальной установки блока модификации адреса и вход сброса счетчика контроля подключены к входу начальной установки устройства, о т л и - ч а ю щ е,е с я тем, что, с целью повышения достоверности функционирования путем ос тцествления контроля хода выполнения различных типов микропрограмм, оно содержит сдвиговый регистр, счетчик распределения, счетчик коррекции и дешифратор, причем вход сброса сдвигового регистра подключен к входу начальной установки устройства, выход поля управлейия блока памяти микрокоманд соединен с информационным входом сдвигового регистра, выход которого соединен с счетными входами счетчика коррекции и счетчика контроля, входом управления режимом управляемого генератора тактовых импульсов и стробирующим входом дешифратора, группа выходов которого подключена к группе управляющих выходов устройства, информационный вход дешифратора соединен с информационным выходом счетчика распределения, счетный вход которого соединен с выходом управляемого генератора тактовых импульсов и входом синхронизации сдвигового регистра, вход записи которого с входами записи регистра микроопераций и счетчи- ка коррекции, синх ровходом блока модификации адреса и выходом переполнения счетчика распределения, выход старшего разряда счетчика коррекции соединен с входом управления направлением счета счетчика контроля, выход переполнения которого является
выходом неисправности устройства, въ{ ход поля контроля блока памяти микрокоманд соединен с информационным - входом счетчика коррекции.
Фиг./
1Z
18
v Ц
Пт I f71 j
/5
(риг, 2
№
/0 /f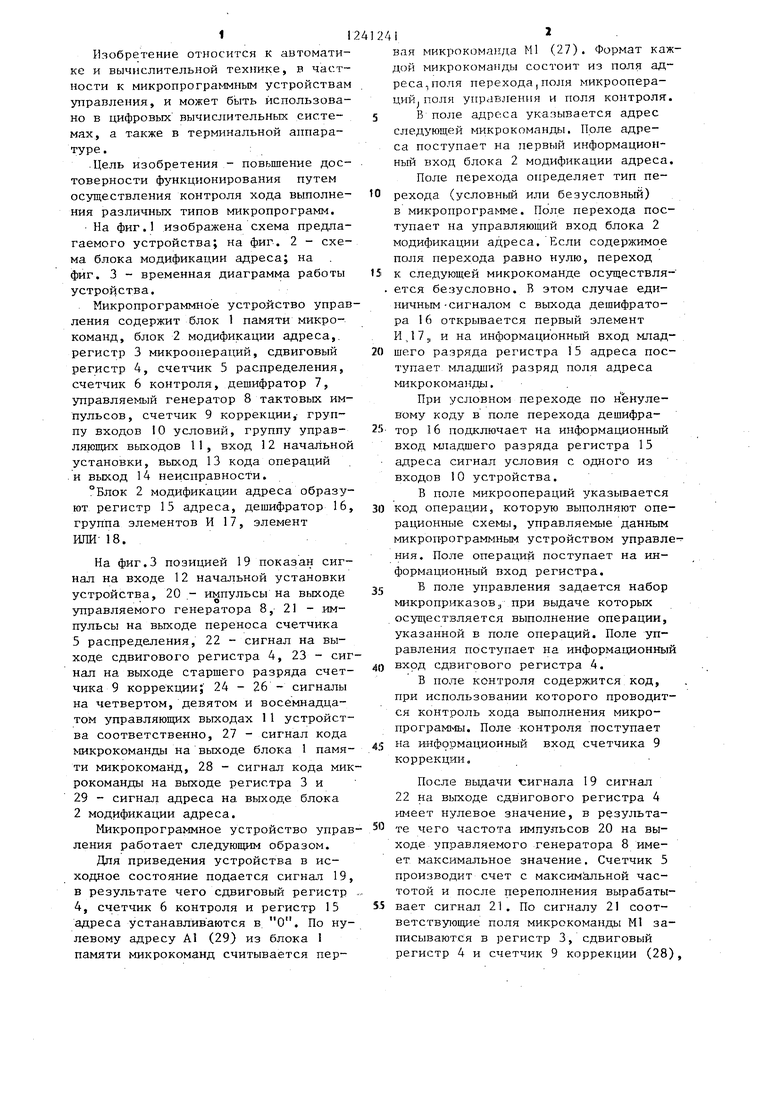
| название | год | авторы | номер документа |
|---|---|---|---|
| Микропрограммное устройство управления | 1983 |
|
SU1111161A1 |
| Программируемый контроллер | 1988 |
|
SU1642446A1 |
| Многотактное микропрограммное устройство управления | 1986 |
|
SU1332318A1 |
| Микропрограммное устройство управления | 1984 |
|
SU1238071A1 |
| Устройство микропрограммного управления | 1990 |
|
SU1815636A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1170457A1 |
| Устройство для деления | 1984 |
|
SU1259251A1 |
| Микропрограммное устройство управления с контролем переходов | 1981 |
|
SU1018118A1 |
| Микропрограммное управляющее устройство | 1982 |
|
SU1084792A2 |
| Модульное устройство для программного управления и контроля | 1988 |
|
SU1647519A1 |
Устройство относится к вычислительной технике и может быть использовано в цифровых вьгчислительньрс системах и терминальной аппаратуре. Цель изобре тения - повьппение достоверности функционирования за счет ослтцествления контроля хода вьтолне- ния различных типов микропрограмм. Устройство содержит блок памяти мик- рокоманд, блок модификации адреса, регистр микроопераций, сдвиговый регистр, счетчик распределения контроля, дешифратор и управляемый генератор тактовых импульсов. За счет введения в устройство счетчика коррекции, счетчика распределения и дешифратора и соответствующих связей осуществляется цель изобретения. 3 ил, 1 табл.; С € 1чэ 4;
. nZr
Редактор Л.Пчелинская ,
Составитель Ю.ЛЕНДОВ Техред О.Гортвай
Заказ 3490/44Тираж 671Подписное
ВНИИПИ Государственного комитета СССР /
по делам изобретений и открытий 113035, Москва, Ж-35, PaymcKasi наб,, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
фаг.
Корректор.Е,Сирохман
| Микропрограммное управляющее устройство | 1980 |
|
SU949657A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Автомат для сортировки полупроводниковых выпрямительных элементов по электрическим параметрам | 1956 |
|
SU108792A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
