I
Изобретение относится к области измерения и может буть использовано в любой)трасли для определения поло- женин многопозиционногомехакизма.
Цель изобретения - повьшение точности определения положения многопозиционного механизма при относительной простоте датчика первичного преобразователя) и минимальном числе проводников в линии связи.
На фиг.1 а и б соответственно прИ ведены диаграммы первого и второго аналоговых сигналов; на фиг. 2 - функциональная схема з стройства; на 1ФИГ. 3 - вариант выполнения арифме- тическо-логическо.го блока.
Для удобства первый 1 и второй 2 аналоговые сигналы приведены на фиг.1 а и б, на которых горизонтальная ось 3 снабжена полимерами позиций n(i) и (i) многопозиционного механизма, на вертикальной оси 4 откладыва ется квантованная амплиту- дй. аналогового сигнала от Ai до A,,
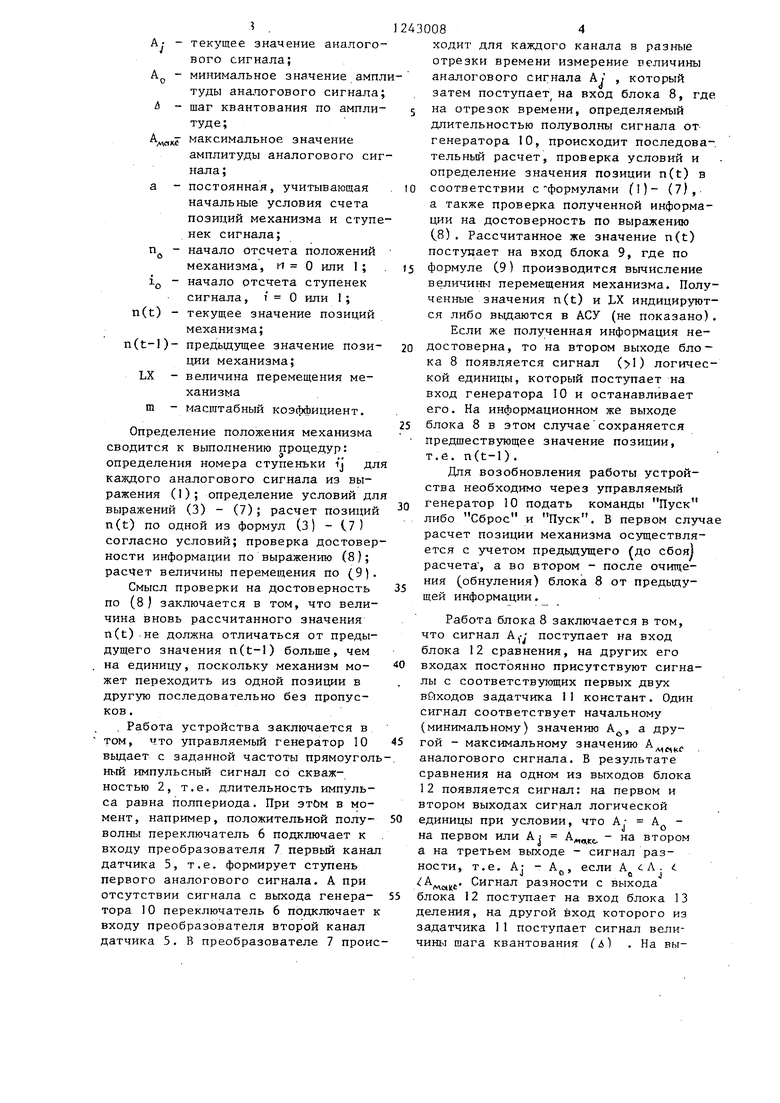
На фиг. 2 приведены датчик 5, переключатель 6, преобразователь 7 амплитуды сигнала, арифметическо-ло- гический блок 8, блок 9 масштабирования, 5гправляемый генератор 10.
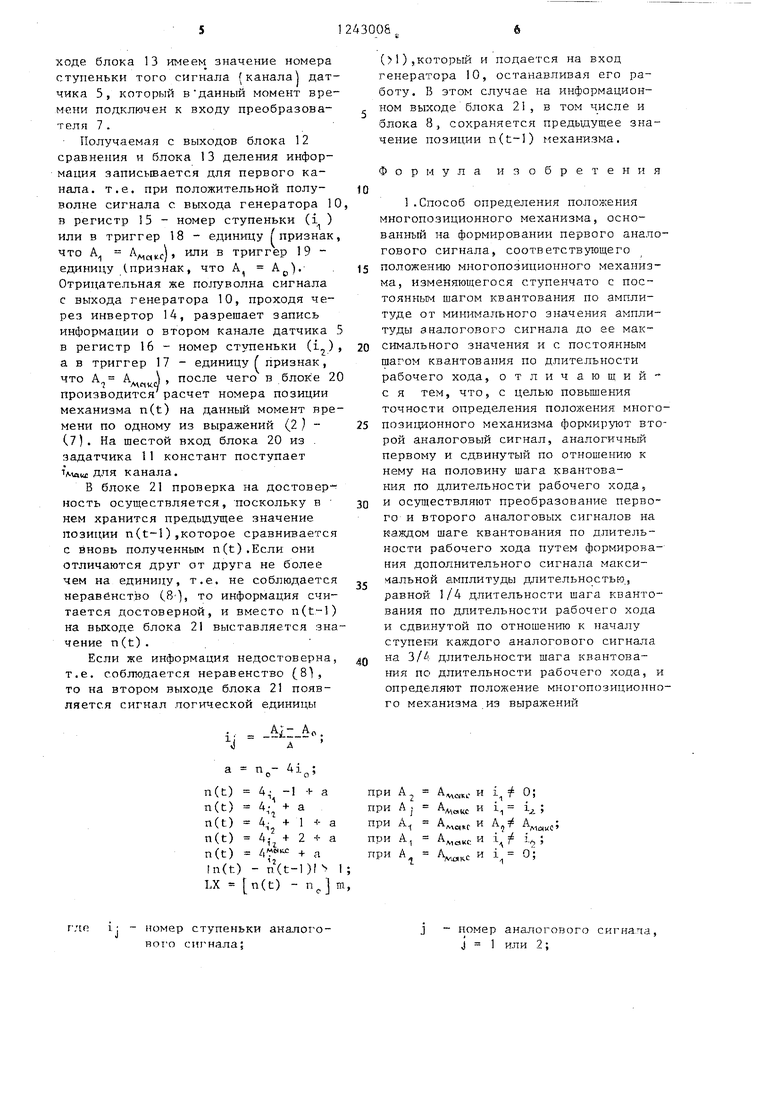
На фигi 3 приведен задатчик 11 констант, блок 12 сравнения, блок 13 деления, инвертор 14, регистры 15 и 16, триггеры 17 - 19, блок 20 сумматоров, блок 21 контроля.
Суть определения, позиции механизма по данному способу заключается в том, что каждой позиции поставлено
(1) i;
Ai. Д
(2)а - 4i,;
(3)n(t)-4,- -1+а при А, А,,и i т 0;
(4)n(t) 4,н- а при Ар i i,, ;
(5)n(t) 4. + 1 + а при А А,«
(6)n(t) « 4., + 2 а при i i,, ;
(7)n(t) « а при А i О;
(8)n(t) - n(t-l) 1 ;
(9)LX rn(t) - п , m,
SJ.
где 1; - номер ступеньки аналогово го сигнала
2430082
строго однозначное соответствие ком бинаций амплитуд бтупенек двух аналоговых сигналов, изменяющихся равномерно ступенчато на постоянный, 1} одинаковый для обоих сигналов шаг квантования, при этом оба сигнала изменяются в одинаковом диапазоне.
Ступеньки отделены друг от друга максимальным значением сигнала, при этом все ступеньки и максимумы в функции от перемещения механизма имеют постоянные длительности, Сту- пены-са и максимум сигнала образуют постоянный шаг, в ко гором их длительности связаны соотношением:
10
15
3.
где bj, - длительность ступеньки
сигнала; bf.- дпительность максимума
сигнала;
Оба сигнала имеют одно и то же . направление изменения (возрастания или убьшания амплитуд в ступеньках, но при этом один сигнал смещен относительно другого на полшага квантования по длительности рабочего хода, в результате чего максимум одного сигнгша приходится на среднюю треть ступеньки другого сигнала.
Определение позиции механизма сводится к последовательному выпол- неншо следующих арифметических и
логических операций согласно системе уравнений
- номер аналогового сигнала, j 1 или 2;
текущее значение аналогового сигнала;
минимальное значение амплитуды аналогового сигнала; шаг квантования по амплитуде;
максимальное значение амплитуды аналогового сигнала;
постоянная, учитывающая начальные условия счета позиций механизма и ступенек сигнала;
начало отсчета положений механизма, и О ипи I ; начало отсчета ступенек сигнала, i О или 1; n(t) - текущее значение позиций
механизма;
(t-l)- предьщущее значение позиции механизма; величина перемещения механизмамасштабный коэффициент.
V
А„ Ь Амакс
а
п, 1,4 LX m Определение положения механизма сводится к выполнению процедур: определения номера ступеньки ij для каждого аналогового сигнала из выражения (1); определение условий для выражений (3) - (7); расчет позиций n(t) по одной из формул (З) - (.7 ) согласно условий; проверка достоверности информации по выражению (8); расчет величины перемещения по (9).
Смысл проверки на достоверность по (8) заключается в том, что величина вновь рассчитанного значения n(t) не должна отличаться от предыдущего значения n(t-l) больше, чем на единицу, поскольку механизм может переходить из одной позиции в другую последовательно без пропусков .
Работа устройства заключается в том, что управляемый генератор 10 выдает с заданной частоты прямоугольный импульсный сигнал со скважностью 2, т.е. длительность импуль- са равна полпериода. При этим в момент, например, положительной полуволны переключатель 6 подключает к входу преобразователя 7 первый канал датчика 5, т.е. формирует ступень первого аналогового сигнала. А при отсутствии сигнала с выхода генератора 10 переключатель 6 подключает к входу преобразователя второй канал датчика 5. В преобразователе 7 происходит для каждого канала в разные отрезки времени измерение величины аналогового сигнала Aj , который затем поступает на вход блока 8, где 5 на отрезок времени, определяемый длительностью полуволны сигнала от генератора 10, происходит последовательный расчет, проверка условий и определение значения позиции n(t) в
10 соответствии с формулами (I)- (7),- а также проверка полученной информации на достоверность по выражению (8), Рассчитанное же значение n(t) поступает на вход блока 9, где по
15 формуле (9) производится вычисление величины перемещения механизма. Полученные значения n(t) и LX индицируются либо выдаются в АСУ (не показано). Если же полученная информация не20 достоверна, то на втором выходе блока 8 появляется сигнал () логической единицы, который поступает на вход генератора 10 и останавливает его. На информационном же выходе
25 блока 8 в этом случае сохраняется предшествующее значение позиции, т.е. n(t-l).
Для возобновления работы устройства необходимо через управляемый генератор 10 подать команды Пуск либо Сброс и Пуск. В первом случае расчет позиции механизма осуществляется с учетом предыдущего до сбоя) расчета , а во втором - после очищения (обнуления) блока 8 от предыдущей информации.
Работа блока 8 заключается в том, что сигнал поступает на вход блока 12 сравнения, на других его
0 входах постоянно присутствуют сигналы с соответствующих первых двух вйходов задатчика 11 констант. Один сигнал соответствует начальному (минимальному) значению А, а дру5 гой - максимальному значению А аналогового сигнала. В результате сравнения на одном из выходов блока 12 появляется сигнал: на первом и втором выходах сигнал логической
0 единицы при условии, что А- А - на первом или А; А - на втором а на третьем выходе - сигнал разности, т.е. AJ - Ар, если . мацс Сигнал разности с выхода
блока 12 поступает на вход блока 13 деления, на другой вход которого из задатчика 11 поступает сигнал величины шага квантования (л) .На вы0
5
ходе блока 13 имеем значение номера ступеньки того сигнала (каналаj датчика 5, который в данный момент времени подключен к входу преобразователя 7 .
Получаемая с выходов блока 12 сравнения и блока 13 деления информация записывается для первого канала, т.е. при положительной полуволне сигнала с выхода генератора 10 в регистр 15 - номер ступеньки (i ) или в триггер 18 - единицу fпризнак, что А ,|, или в триггер 19 - единицу (признак, что А А). Отрицательная же по:гуволна сигнала с выхода генератора 10, проходя через инвертор 14, разрешает запись информации о втором канале датчика 5 в регистр 16 - номер ступеньки (i), а в триггер 17 - единицу Г признак, что А,, А А , после чего в блок е 20 производится расчет номера позиции механизма n(t) на данный момент времени по одному из выражений (2 ) - (7). На шестой вход блока 20 из . задатчика 11 констант поступает iMata для канала.
В блоке 21 проверка на достовер- ность осуществляется, поскольку в нем хранится предыдущее значение позиции n(t-l),которое сравнивается с вновь полученным n(t).Ecли они отличаются друг от друга не более чем на единицу, т.е. не соблюдается неравенство С8-), то информация считается достоверной, и вместо n(t) на выходе блока 21 выставляется значение n(t) .
Если же информация недостоверна, т.е. соблюдается неравенство (8), то на втором выходе блока 21 появляется сигнал логической единицы
Ч
п 41
г .чп ij - номер ступеньки аналогового сигнала;
0
5
0
5
0
5
()1),который и подается на вход генератора 10, останавливая его работу. В этом случае на информационном выходе блока 21, в том числе и блока 8, сохраняется предьщущее значение позиции n(t-I) механизма.
Формула изобретения
1. Способ определения положения многопозиционного механизма, основанный на формировании первого аналогового сигнала, соответствующего положе яию многопозиционного механизма, изменяющегося ступенчато с пос- тояннызч шагом квантования по амплитуде от минимального значения амплитуды аналогового сигнала до ее мак- сш- ального значения и с постоянньм шагом квантования по длительности рабочего хода, отличающий- с я тем, что, с целью повышения точности определения положения многопозиционного механизма формируют второй аналоговый сигнал, аналогичный первому и сдвинутый по отношению к нему на половину шага квантования по длительности рабочего хода, и осуществляют преобразование первого и второго аналоговых сигналов на каждом шаге квантования по длительности рабочего хода путем формирования дополнительного сигнала максимальной амплитуды длительностью, равной 1/4 длительности щага квантования по длительности рабочего хода и сдвинутой по отношеште) к началу ступени каждого аналогового сигнала на 3/4 длительности шага квантования по длительности рабочего хода, и определяют положение многопозиционного механизма из выражений
номер аналогового сигнала, J 1 или 2;
А - текущее значение аналоговго сигнала;
АО - минимальное значение/
амплитуды аналогового сиг нала;
А 7 максимальное значение
MOWI
амплитуды аналогового сигнала;
л - шаг квантования по ампли- туде;
а - постоянная, учитывающая начальные условия счета позиций механизма и ступенек сигнала;
п - начало отсчета положений
О
механизма,и О или 1; ig - начало отсчета ступенек
сигнала , или 1 , n(t) - текущее значение позиций
механизмаi
n(t-l)- предьиущее значение позиции механизма,
m - масштабный коэффициент, .LX - величина перемещения меха
низма.
2. Устройство для определения положения многопозиционного механизма, содержащее датчик., преобразователь амплитуды сигнала и блок , масштабирования, отличаю- щ е е с я тем, что, с целью повьше ння ТОЧНОСТИ в него введены переключатель, управляемый генератор импульсов, арифметическо- - логический блок, выходы, датчика подключены к информационным входам переключателя, выход которого через преобразователь амплитуды сигнала соединен с информаци- онным входом арифметическо-логи-. ческого блока, первый выход которого через блок ма.сштабирования подключен к выходу устройства, второй выход через управляемый генератор подключен к своему управляющему входу и к управляющему входу переключателя.
3. Устройство по п. 2, о т л.-и- чающееся тем, что арифмети- ческо-логический блок содержит за- датчик констант, блок сравнения, блок деления, инвертор, регистры, триггеры, блок сумматоров, пороговый элемент, первый и втор ой выходы задатчика констант подсоединены к первому и второму входам блока сравнения, третий выход - к первому входу блока деления, четвертый - к первому входу блока сумматоров, вых которого через блок контроля соединен соответственно с первым и вто- рым выходами арифметическо-логичес- кого блока, информационный вход которого подключен к третьему входу блока сравнения, первый выход ко- торого- соединен с вторым входом блока деления, второй выход подключен к первым входам первого и второго триггеров, третий выход - к первому входу третьего триггера, управляющий вход арифметическо-логи ческого блока подключен непосредственно к первому входу первого регистра, к вторым входам второго и третьего триггеров и через инвертор - к первому входу второго регистра и к второму входу первого триггера, выход блока деления подключен к вторым входам первого и второго регистров, выходы первого и второго регистров и выходы первого второго и третьего триггеров подключены к соответствующим входам блока сумматоров.
n(i,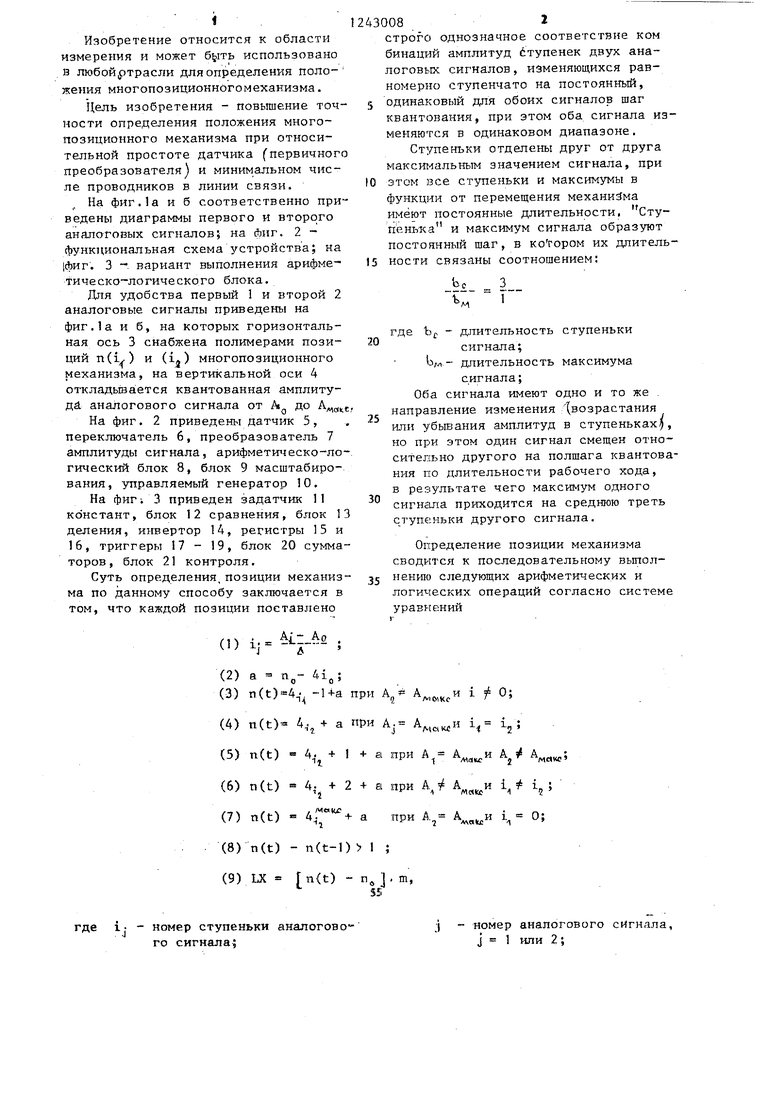
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения амплитудного значения электрического сигнала | 1986 |
|
SU1441321A1 |
| Дельта-кодек | 1989 |
|
SU1725398A1 |
| Устройство для регистрации информации | 1985 |
|
SU1304170A1 |
| Устройство для воспроизведения аналогового сигнала | 1988 |
|
SU1524175A1 |
| Многоканальное устройство для локации источника акустической эмиссии | 1989 |
|
SU1689840A1 |
| Цифровой демодулятор сигналов с амплитудной - относительной фазовой манипуляцией | 2022 |
|
RU2790205C1 |
| ЦИФРОВОЙ ДЕМОДУЛЯТОР СИГНАЛОВ С МНОГОПОЗИЦИОННОЙ ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2021 |
|
RU2776968C1 |
| Устройство для вычисления показательной функции | 1981 |
|
SU981997A1 |
| СПОСОБ ИНДЕНТИФИКАЦИИ ТОНАЛЬНЫХ СИГНАЛОВ В СЕТЯХ СВЯЗИ И ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2291405C2 |
| ИНТЕРПОЛИРУЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ИНТЕРВАЛА ВРЕМЕНИ В ЦИФРОВОЙ КОД | 2014 |
|
RU2583165C1 |
Изобретение касается измерения и может быть использовано в любой отрасли для определения положения многопозиционного объекта. Способ основан на формировании первого и второго аналогового сигналов, соответствующих положению многопозиционного объекта, изменяющихся ступенчато с постоянным шагом квантования по амплитуде и по длительности рабочего хода и сдвинутых по отношению один к другому на половину шага квантования по длительности рабочего хода, добавлении к обоим сигналам дополнительного, равного максимальной амплитуде, длительностью, равной 1/4 шага квантования по дли- тельности рабочего хода, и сдвинутого по отношению к началу ступени каждого аналогового сигнала на 3/4 длительности шага квантования по длительности рабочего хода и опре- . делении .соответствующим суммированием сигналов положения механизма. Устройство содержит датчик, переключатель, преобразователь амплитуды, арифметическо-логический блок, блок масштабирования и управляемый генератор.2 с. и 1з.п.ф-лы, 3 ип. 8 сл
О ГТЗ ТТГТЗ
nfit)
P(/t.f
(put. г
Составитель H.Ibicei-iKO Редактор С.Лыжова Техред М.Ходанич Корректор С.Черни
Заказ 3710/51 Тираж 515Подписное
ВНИИПИ Государственного комитета -СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие.г.Ужгород, ул.Проектная,4
л
AMOKC
f--
У - is-йfAl
ii OfAj A }
jxr
Aj-Ao
Г
ij
/7
fff
АгЛ,А4,, в
20
i /r/eJ
rr
| Телемеханика./ Под ред | |||
| В.М.Новацкого | |||
| М.Высшая школа, 1967, с.52-59 | |||
| Агейкин Д.И | |||
| Датчику контроля и регулирования | |||
| М.: Машиностроение, 1965, с.19. |
