Изобретение относится к строительным машинам, может быть использовано в одноосных прицепных машинах, предназначенных для бестраншейного заложения гибких линейных сооружений в грунт, и является усовершенствованием изобретения по авт. св. № 821661.
Цель изобретения - повышение точности стабилизации при прохождении машиной сложных участков трассы. За счет этого повышается,надежность кабельных линий связи при их, эксплуатации, улучшается качество каналов, образованных на этих линиях, сбкращается количество повреждений, вызванных раскопками, а также уменьшается количество просто ёв каналов связи и cнижaюtcя стоимость ремонтно-восстано- вительных работ и объемы тяжелого непроизводительного ручного труда.
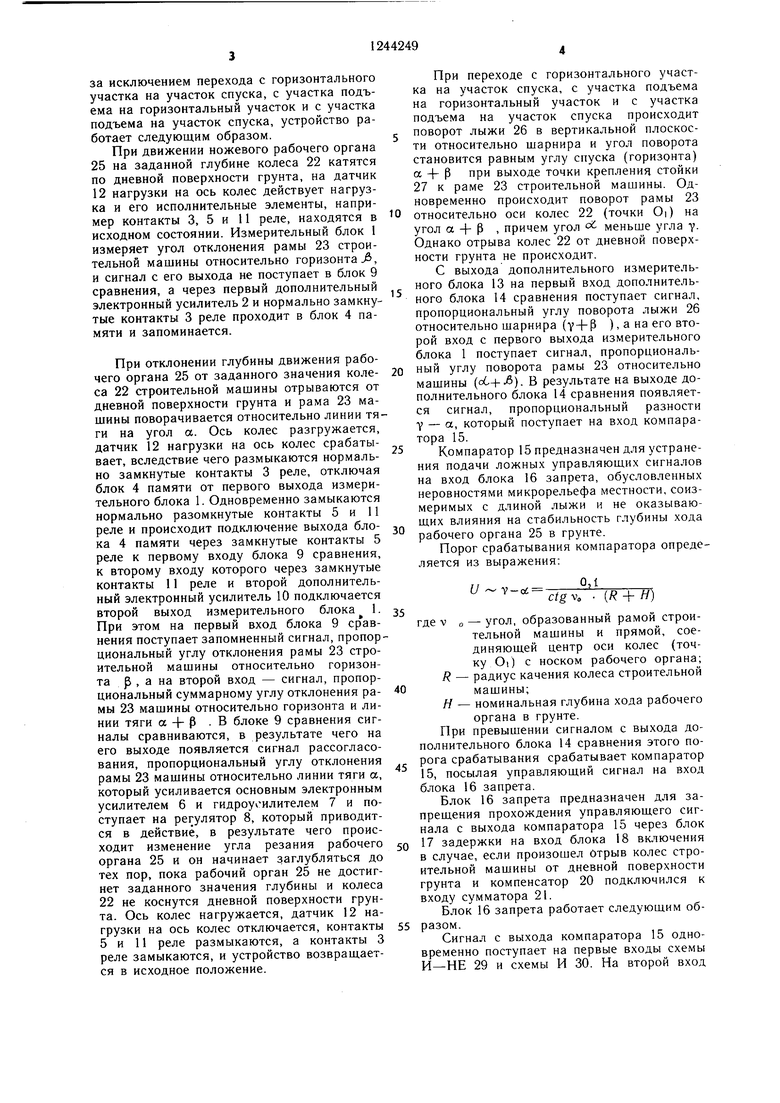
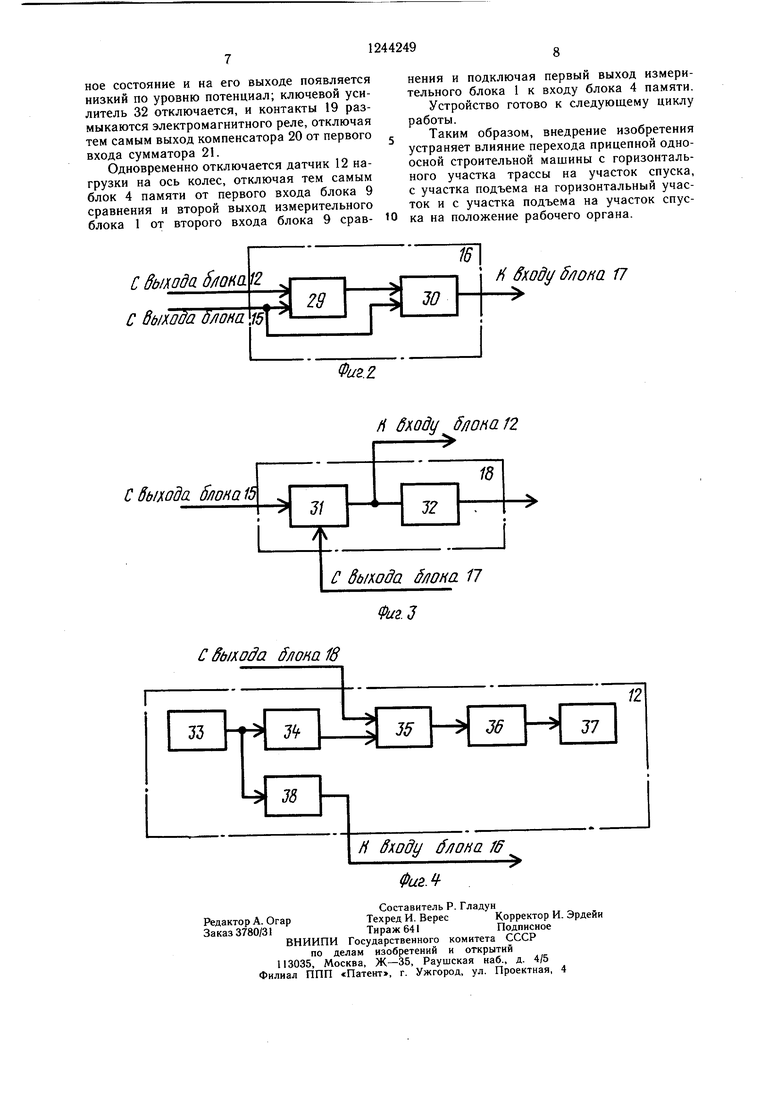
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - блок запрета, пример выполнения; на фиг. 3 - блок включения, пример выполнения; на фиг. 4 - датчик нагрузки на ось колес, пример выполнения.
Устройство содержит измерительный блок 1, первый дополнительный электронный усилитель 2, исполнительные элементы 3 в виде, например, нормально замкнутых контактов реле датчика нагрузки на ось колес, блок 4 памяти, исполнительные элементы 5 в виде, например, нормально разомкнутых контактов реле датчика нагрузки на ось колес, основной электронный усилитель 6, гидравлический усилитель 7, регулятор 8, блок 9 сравнения, второй дополнительный электронный усилитель 10, исполнительные элементы 11 в виде, например, нормально разомкнутых контактов реле датчика нагрузки на ось колес, датчик 12 нагрузки на ось колес, дополнительный измерительный блок 13, дополнительный блок 14 сравнения, компаратор 15, блок 16 запрета, линию 17 задержки, блок 18 включения, дополнительные исполнительные элементы 19 в виде, например, нормально разомкнутых контактов реле блока включения, компенсатор 20 и сумматор 21.
На фиг. 1 обозначены также колесо 22 строительной машины, рама 23 строительной машины, точка 24 прицепа, рабочий орган 25, лыжа 26, стойка 27 и ось 28 колеса.
Блок 16 запрета содержит схему И-НЕ 29 и схему И 30,
Блок 18 включения выполнен в виде триггера 31 и транзисторного ключевого усилителя 32, в коллекторную цепь выходного транзистора которого включена обмотка электромагнитного переключаюш,его реле.
Датчик 12 нагрузки на ось колес состоит из магнитоупругого преобразователя 33, схемы И-НЕ 34, схемы ИЛИ 35, ключевого усилителя 36, электромагнитного пе- реключаюшего реле 37 и схем И-НЕ 38.
Компенсатор 20 может быть выполнен в виде источника постоянного напряжения, уро5
вень выходного напряжения которого - регулируемый и зависит от марки кабеле- укладочного агрегата и выставляется перед началом работы (при установке устройства на кабелеукладочный агрегат данной марки).
Дополнительный измерительный блок может быть выполнен в виде известного маятникового датчика угла отклонения. Дополнительный измерительный блок рас0 положен на лыже, крепящейся к стойке с помошью шарнирного соединения, обеспечивающего поворот лыжи в вертикальной плоскости. Стойка неподвижно закреплена на раме строительной машины около точки прицепа.
Первый выход измерительного блока 1 подключен к второму входу дополнительного блока 14 сравнения, а также через первый дополнительный усилитель 2 и исполнительные элементы 3 в виде, например, нор0 мально замкнутых контактов реле датчика нагрузки на ось колес подключен к входу блока 4 памяти. Второй выход измерительного блока 1 через второй дополнительный электронный усилитель 10 и исполнительные элементы 11 в виде, например, нормально
5 замкнутых контактов реле датчика нагрузки на ось колес подключен к второму входу блока 9 сравнения.
Выход блока 4 памяти через исполнительные элементы 5 в виде, например, нормально разомкнутых контактов реле датчика нагрузки на ось колес подключен к первому входу блока 9 сравнения. К входу основного электронного усилителя 6 подключен выход сумматора 21, а выход основного электронного усилителя 6 через гидравлический усилитель 7 подключен к регулятору 8.
Выход дополнительного измерительного блока 13 подключен к первому выходу дополнительного блока 14 сравнения, выход которого подключен к входу компаратора 15.
0 Выход компаратора 15 подключен к первому входу блока 16 запрета, к второму входу которого подключен один из выходов датчика 12 нагрузки на ось колес. Выход блока 16 запрета через линию 17 задержки подключен к первому входу блока 18 вклю5 чения, к второму входу которого подключен второй выход компаратора 15. Второй выход блока 18 включения подключен к входу датчика 12 нагрузки на ось колес.
Выход компенсатора 20 через дополнительные испытательные элементы 19 в виде, например, нормально разомкнутых контактов реле блока 18 включения подключен к первому входу сумматора 21, к второму входу которого подключен выход блока 9 сравнения.
При работе прицепной одноосной строительной машины на пересеченной местности и переходе характерных неровностей.
за исключением перехода с горизонтального участка на участок спуска, с участка подъема на горизонтальный участок и с участка подъема на участок спуска, устройство работает следующим образом.
При движении ножевого рабочего органа 25 на заданной глубине колеса 22 катятся по дневной поверхности грунта, на датчик 12 нагрузки на ось колес действует нагрузка и его исполнительные элементы, например контакты 3, 5 и 11 реле, находятся в исходном состоянии. Измерительный блок 1 измеряет угол отклонения рамы 23 строительной машины относительно горизонта 3, и сигнал с его выхода не поступает в блок 9 сравнения, а через первый дополнительный электронный усилитель 2 и нормально замкнутые контакты 3 реле проходит в блок 4 памяти и запоминается.
При отклонении глубины движения рабочего органа 25 от заданного значения колеса 22 строительной машины отрываются от дневной поверхности грунта и рама 23 машины поворачивается относительно линии тяги на угол а. Ось колес разгружается, датчик 12 нагрузки на ось колес срабатывает, вследствие чего размыкаются нормально замкнутые контакты 3 реле, отключая блок 4 памяти от первого выхода измерительного блока 1. Одновременно замыкаются нормально разомкнутые контакты 5 и 11 реле и происходит подключение выхода блока 4 памяти через замкнутые контакты 5 реле к первому входу блока 9 сравнения, к второму входу которого через замкнутые контакты 11 реле и второй дополнительный электронный усилитель 10 подключается второй выход измерительного блока 1. При этом на первый вход блока 9 нения поступает запомненный сигнал, пропорциональный углу отклонения рамы 23 строительной машины относительно горизонта р , а на второй вход - сигнал, пропорциональный суммарному углу отклонения рамы 23 машины относительно горизонта и линии тяги а -f- р .В блоке 9 сравнения сигналы сравниваются, в результате чего на его выходе появляется сигнал рассогласования, пропорциональный углу отклонения рамы 23 машины относительно линии тяги а, который усиливается основным электронным усилителем 6 и гидроусилителем 7 и поступает на регулятор 8, который приводится в действие, в результате чего происходит изменение угла резания рабочего органа 25 и он начинает заглубляться до тех пор, пока рабочий орган 25 не достигнет заданного значения глубины и колеса 22 не коснутся дневной поверхности грунта. Ось колес нагружается, датчик 12 нагрузки на ось колес отключается, контакты 5 и 11 реле размыкаются, а контакты 3 реле замыкаются, и устройство возврашает- ся в исходное положение.
5
При переходе с горизонтального участка на участок спуска, с участка подъема на горизонтальный участок и с участка подъема на участок спуска происходит J поворот лыжи 26 в вертикальной плоскости относительно шарнира и угол поворота становится равным углу спуска (горизонта) а + Р при выходе точки крепления стойки 27 к раме 23 строительной машины. Одновременно происходит поворот рамы 23
0 относительно оси колес 22 (точки О:) на угол а + Р , причем угол оС меньше угла у. Однако отрыва колес 22 от дневной поверхности грунта не происходит.
С выхода дополнительного измерительного блока 13 на первый вход дополнительного блока 14 сравнения поступает сигнал, пропорциональный углу поворота лыжи 26 относительно шарнира (v + P ), а на его второй вход с первого выхода измерительного блока 1 поступает сигнал, пропорциональ0 ный углу поворота рамы 23 относительно машины (). В результате на выходе дополнительного блока 14 сравнения появляется сигнал, пропорциональный разности 7 - а, который поступает на вход компаратора 15.
5 Компаратор 15 предназначен для устранения подачи ложных управляющих сигналов на вход блока 16 запрета, обусловленных неровностями микрорельефа местности, соизмеримых с длиной лыжи и не оказывающих влияния на стабильность глубины хода рабочего органа 25 в грунте.
Порог срабатывания компаратора определяется из выражения:
0
и V-oi
0,1
ctgv, . (R + H)
где V о - угол, образованный рамой строительной машины и прямой, соединяющей центр оси колес (точку ОГ) с носком рабочего органа; R - радиус качения колеса строительной машины;
Н - номинальная глубина хода рабочего
органа в грунте.
При превышении сигналом с выхода дополнительного блока 14 сравнения этого порога срабатывания срабатывает компаратор 15, посылая управляющий сигнал на вход блока 16 запрета.
Блок 16 запрета предназначен для запрещения прохождения управляющего сигнала с выхода компаратора 15 через блок 17 задержки на вход блока 18 включения в случае, если произошел Отрыв колес строительной машины от дневной поверхности грунта и компенсатор 20 подключился к входу сумматора 21.
Блок 16 запрета работает следующим об- разом.
Сигнал с выхода компаратора 15 одновременно поступает на первые входы схемы И-ПЕ 29 и схемы И 30. На второй вход
схемы И-НЕ 29 с выхода датчика 12 нагрузки на ось колес (так как нет отрыва колес) поступает нулевой по уровню сигнал, в результате чего на выходе схемы И-НЕ 29 появляется высокий по уровню сигнал, поступающий на второй вход схемы И 30, а на выходе последней - также высокий по уровню сигнал, поступающий на вход блока 17 задержки.
В случае отрыва колес на соответствующие входы схемы И-НЕ 29 с выходов компаратора 15 и датчика 12 нагрузки на ось колес поступают высокие по уровню сигналы, в результате чего на выходе схемы И-НЕ 29 появляется низкий по уровню сигнал, запрещающий прохождение управляющего сигнала через схему И 30 на вход линии 17 задержки.
Блок 17 задержки предназначен для предотвращения подачи ложного управляющего сигнала на вход блока 18 включения при наезде лыжи 26 на булыжник, бугорок и т. п., т. е. когда на выходе дополнительного блока сравнения появляется сигнал, но изменения глубины хода рабочего органа не происходит.
Сигнал с выхода блока 16 запрета задерживается на время, определяемое выражением:
ЧУ зад
i
VJ,
где / - длина лыжи;
I/M - скорость движения строительной машины, и поступает на вход блока 18 включения.
Блок включения работает следующим образом.
Сигнал с выхода блока 17 задержки опрокидывает триггер 31, в результате чего на его выходе находится высокий по уровню потенциал, поступающий на второй вход схемы ИЛИ 35 датчика 12 нагрузки на ось колес, в результате чего на ее выходе появляется высокий по уровню сигнал, под действием которого срабатывает ключевой усилитель 36, в коллекторную цепь выходного транзистора которого включена обмотка переключающего электромагнитного реле 37. В результате размыкаются нормально замкнутые контакты 3 реле датчика нагрузки на ось колес, отключая блок 4 памяти от первого выхода измерительного блока 1. Одновременно замыкаются нормально разомкнутые контакты 5 и 11 реле датчика нагрузки на ось колес и происходит подключение выхода блока 4 памяти через замкнутые контакты 5 реле к первому входу блока 9 сравнения, к второму входу которого через замкнутые контакты 11 реле и второй дополнительный электронный усилитель 10 подключается второй выход измерительного блока 1. При этом на первый вход блока 9 сравнения поступает запомненный сигнал, пропорциональный углу от5
клонения рамы 23 строительной мащины относительно горизонта р , а на второй вход - сигнал, пропорциональный суммарному углу отклонения рамы 23 относительно горизон- 5 та и линии тяги (Р -f а). В блоке 9 сравнения сигналы сравниваются, в результате чего на его выходе появляется сигнал рассогласования, пропорциональный углу отклонения рамы 23 относительно линии тяги а. Кроме того, потенциал с выхода триггера
31 поступает на вход ключевого усилителя 32, который срабатывает и включает электромагнитное переключающееся реле. В результате происходит замыкание нормально разомкнутых контактов 19 этого реле и под5 ключение выхода компенсатора 20 к первому входу сумматора 21.
Введение в устройство компенсатора 20 обусловлено тем, что при переходе прицепной строительной мащины с горизонтального участка на участок спуска, с участка
0 подъема на горизонтальный участок, с участка подъема на участок спуска величина вы- глубления ЛЯ определяется выражением:
ДЯ (/ + ЯХ1 + ctgVo sin a-cos а), в то время как при переходе других характерных неровностей, а также при образовании грунтовой призмы волочения и встрече рабочего органа с неразрущаемыми подземными препятствиями величина выглубления ДЯ определяется выражением:
АЯ (/ + ЯХ1 + с во smct-cosa), 0 где во - угол, образованный рамой строительной машины и прямой, соединяющей точку 24 прицепа с носком рабочего органа.
Следовательно, без компенсатора 20 сигнал рассогласования с выхода блока 9 срав- нения отрабатывается регулятором 8 с ощиб- кой, величина которой определяется выражением:
Л-- 2(ctgQo-ctg TgWo
0 Для устранения этой ощибки и введен компенсатор 20, выходной сигнал которого пропорционален б.
Этот сигнал суммируется с сигналом рассогласования на выходе блока 9 сравнения
сумматором 21 и через основной электронный 6 и гидравлический 7 усилители поступает на регулятор 8. Регулятор 8 отрабатывает суммарный сигнал, изменяя угол резания рабочего органа 25, и он начинает заглубляться. При достижении номинальной
0 глубины хода Н, когда угол наклона лыжи близок или равен углу а, на выходе дополнительного блока сравнения присутствует сигнал, меньщий порога срабатывания компаратора 15; происходит его опрокидывание в исходное состояние, и на втором
5 выходе компаратора формируется импульс сброса, поступающий на второй вход блока 18 включения. Под действием этого импульса происходит сброс триггера 31 в исходное состояние и на его выходе появляется низкий по уровню потенциал; ключевой усилитель 32 отключается, и контакты 19 размыкаются электромагнитного реле, отключая тем самым выход компенсатора 20 от первого входа сумматора 21.
Одновременно отключается датчик 12 нагрузки на ось колес, отключая тем самым блок 4 памяти от первого входа блока 9 сравнения и второй выход измерительного блока 1 от второго входа блока 9 сравС 8ь/хода SnoHaib
J/
С бышда 11
С 6ы}(ада блона 18
Фиг. ЧСоставитель Р. Гладун
Редактор А. ОгарТехред И. ВересКорректор И. Эрдейи
Заказ 3780/31Тираж 641Подписное
ВНИИПИ Государствеиного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
нения и подключая первый выход измерительного блока 1 к входу блока 4 памяти. Устройство готово к следующему циклу работы.
Таким образом, внедрение изобретения устраняет влияние перехода прицепной одноосной строительной машины с горизонтального участка трассы на участок спуска, с участка подъема на горизонтальный участок и с участка подъема на участок спуска на положение рабочего органа.
f дходд 5/IOHU12
18
12
/i бкоду блона Г6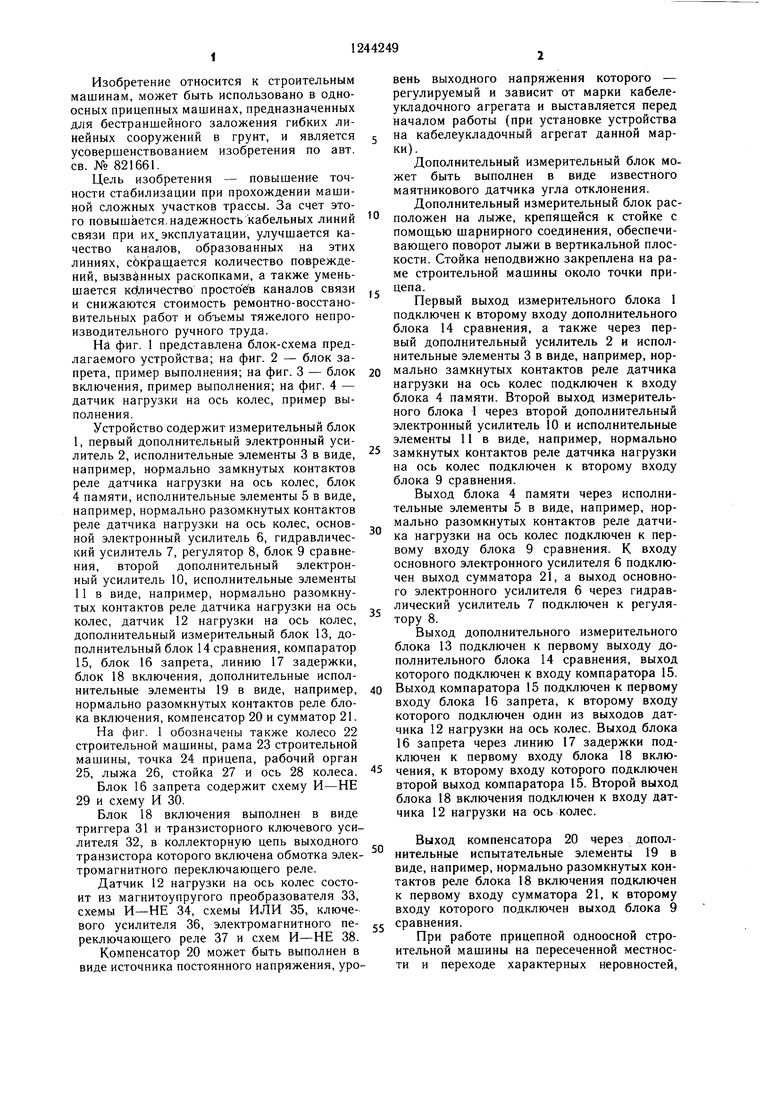

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической стаби-лизАции пОлОжЕНия РАбОчЕгО ОРгАНАСТРОиТЕльНОй МАшиНы | 1979 |
|
SU821661A1 |
| Устройство для автоматической стабилизации положения рабочего органа строительной машины | 1983 |
|
SU1101525A2 |
| Устройство для автоматической стабилизации положения рабочего органа самоходной планировочной машины | 1980 |
|
SU1004550A1 |
| Регулятор натяжения | 1985 |
|
SU1284926A1 |
| Система непрерывного контроля трактов связи | 1984 |
|
SU1197112A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ НАПРЯЖЕНИЯ, ПРОГРАММИРОВАНИЯ И РАСПРЕДЕЛЕНИЯ АКТИВНОЙ НАГРУЗКИ МЕЖДУ РАЗНОТИПНЫМИ ИСТОЧНИКАМИ ЭЛЕКТРОЭНЕРГИИ СУДНА | 2019 |
|
RU2753704C2 |
| СПОСОБ ВКЛЮЧЕНИЯ ПИТАНИЯ АВТОНОМНОГО СКВАЖИННОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2257470C1 |
| Способ автоматической аэрогазовой защиты и устройство для его осуществления | 1989 |
|
SU1721265A1 |
| Устройство для регулирования и контроля производительности измельчителя | 1990 |
|
SU1791031A1 |
| Устройство для управления движением автоматического транспорта | 1986 |
|
SU1320828A2 |

| Устройство для автоматической стаби-лизАции пОлОжЕНия РАбОчЕгО ОРгАНАСТРОиТЕльНОй МАшиНы | 1979 |
|
SU821661A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
