(54) УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА СТРОИТЕЛЬНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической стабилизации положения рабочего органа строительной машины | 1985 |
|
SU1244249A2 |
| Устройство для автоматической стабилизации положения рабочего органа строительной машины | 1983 |
|
SU1101525A2 |
| Автоматический регулятор землеройной машины | 1982 |
|
SU1120073A1 |
| СКРЕПЕРНЫЙ АГРЕГАТ | 2005 |
|
RU2295610C2 |
| Устройство для автоматической стабилизации положения рабочего органа самоходной планировочной машины | 1980 |
|
SU1004550A1 |
| Система автономного управления дорожно-строительной машины | 2022 |
|
RU2794670C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| Устройство для автоматической стабилизации положения рабочего органа дорожно-строительных машин | 1979 |
|
SU883280A1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1982 |
|
SU1082914A1 |
1
Изобретение относится к строительным машинам и может быть использовано в прицепных машинах, предназначенных для бестраншейного заложения гибких линейных сооружений в грунт, в частности к прицепным кабелеукладочным агрегатам, имеющим устройства для автоматической стабилизации положения ножевого рабочего органа.
Известны строительные машины с устройствами автоматической стабилизации положения рабочего, органа, содержашими измерительные блоки, усилители и исполнительные элементы 1.
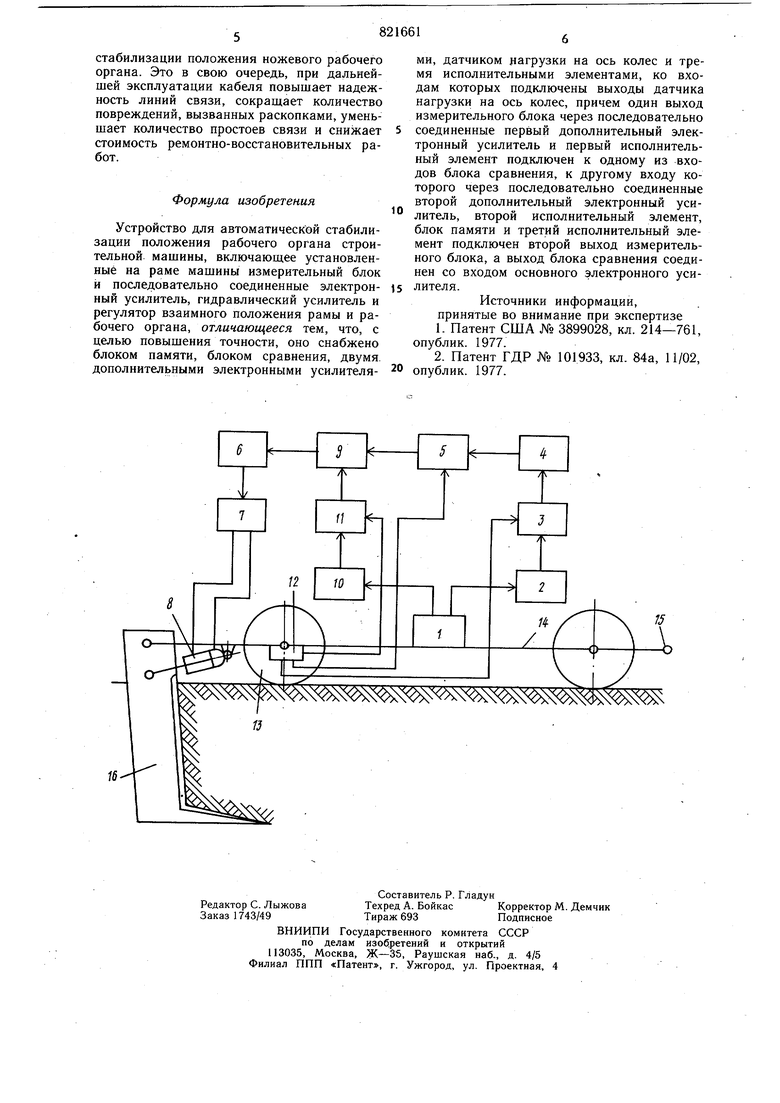
Наиболее близким по техническому решению к изобретению является устройство для автоматической стабилизации шарнирно подвешенного плужкового рабочего органа землеройной машины, состоящей из установленных на раме машины измерительного блока и последовательно соединенных электронного и гидравлического усилителей и регулятора взаимного, положения рамы и рабочего органа. Измерительное устройство определяет наклон рамы землеройной мащнны и на основании этого определяет высоту рабочего органа относительно fo4KH
тяги. При изменении наклона рамы, вызванного изменением результирующей сопротивления резанию грунта, сигнал рассогласования с выхода измерительного устройства через электронный и гидравлический усилители поступает на регулятор, который регулирует положение рабочего органа таким . образом, чтобы изменением угла резания изменить равновесие момента и тем самым возвратить раму землеройной машины в исходное положение. Тем самым рабочий орO ган снова принимает требуемую высоту относительно точки тяги и, следовательно, заданную глубину положения рабочего органа относительно поверхности грунта 2.
Известное устройство для автоматической стабилизации шарнирно подвешенного
5 плужкового рабочего органа землеройной машины при работе на пересеченной местности не выдерживает заданной глубины положения рабочего органа, так как при выходе землеройной машины на участок подъема (спуска) ее рама поворачивается относительно горизонта на угол подъема (спуска), и с измерительного устройства через усилители на регулятор поступает ч сигнал рассогласования, в то время как заданная глубина положения рабочего органа не изменилась. Это приводит к необоснованному изменению глубины положения рабочего органа, что в конечном итоге, снижает точность стабилизации. Цель изобретения - повышение точности стабилизации положения рабочего органа при любом изменении рельефа местности, в результате чего повышается надежность линий связи, сокращается количество повреждений, вызванных раскопками, уменьшаются простои каналов связи и снижается стоимость ремонтно-восстановительных работ. Указанная цель достигается тем, что устройство снабжено блоком памяти, блоком сравнения, двумя дополнительными электрон-1 ными усилителями, датчиком нагрузки на ось колес и тремя исполнительными элементами, ко входам которых подключены выходы датчика нагрузки на ось колес, причем один выход измерительного блока через последовательно соединенные первый дополни-2 тельный электронный усилитель и первый исполнительный элемент подключен к одному из входов блока сравнения, к другому входу которого через последовательно соединенные второй дополнительный электронный усилитель, второй исполнительный элемент, блок памяти и третий исполнительный элемент подключен второй выход измерительного блока, а выход блока сравнения соединен с входом основного усилителя. На чертеже представлен прицепной кабелеукладочный агрегат с устройством для автоматической стабилизации положения ножевого рабочего органа , общий вид. Устройство содержит измерительный блок 1, первый дополнителы ый электронный усилитель 2, исполнительные элементы 3 в виде, например, нормально замкнутых контактов реле датчика нагрузки на ось колес, блок 4 памяти, исполнительные элементы 5 в виде, например, нормально разомкнутых контактов реле датчика нагрузки на ось колес, основной электронный усилитель 6, гидравлический усилитель 7, регулятор 8, блок 9 сравнения, второй дополнительный электронный усилитель 10, исполнительные элементы 11 в виде, например, нормально разомкнутых контактов реле датчика нагрузки на ось колес, датчик 12 нагрузки на ось колес. На схеме показаны также колесо 13 агрегата, реле 14 агрегата, точка 15 сцепа, рабочий орган 16. Устройство для автоматической стабилизации положения ножевого рабочего органа прицепной строительной машины работает следующим образом. При движении ножевого рабочего органа 16 на заданной глубине, колеса 13 прицепной строительной машины катятся по дневной поверхности грунта, на датчик нагрузки на ось колес 12 действует нагрузка и его исполнительные элементы. например контакты реле 3, 5 и 11, находятся в исходном состоянии. Измерительный блок 1 измеряет угол отклонения рамы строительной машины относительно горизонта j8 и сигнал с его выхода не поступает в блок 9 сравнения, а через первый дополнительный электронный усилитель 2 и нормально замкнутые контакты реле 3 поступает в блок 4 памяти, где и замыкается. При отклонении глубины движения ножевого рабочего органа 16 от заданного значения колеса прицепной строительной машины 13 отрываются от дневной поверхности грунта и рама машины 14 поворачивается относительно линии тяги на угол oL. Ось колес разгружается, датчик нагрузки на ось колес 12 срабатывает, вследствие чего размыкаются нормально замкнутые контакты реле 3, отключая блок 4 памяти от первого выхода измерительного блока 1. Одновременно замыкаются нормально разомкнутые контакты реле 5 и 11, тем самым происходит подключение выхода блока 4 памяти через замкнутые контакты реле 5 к первому входу блока сравнения 9, к второму входу которого через замкнутые контакты реле 11 и второй дополнительный электронный усилитель 10 подключается второй выход измерительного блока 1. Причем на первый вход блока 9 сравнения поступает запомненный сигнал, пропорциональный углу отклонения рамы машины 14 относитёльно горизонта Д а на второй вход - сигнал, пропорциональный суммарному углу отклонения рамы машины 14 относительно горизонта и линии тяги d+ f. Здесь сигналы сравниваются, в результате чего на выходе блока 9 сравнения появляется сигнал рассогласования, пропорциональный углу отклонения рамы машины 14 относительно линии тяги о(, который усиливается основным электронным усилителем 6 и гидроусилителем 7 и поступает на регулятор 8, который приводится в действие, в результате чего происходит изменение угла резания ножевого рабочего органа 16 и он начинает заглубляться. Это происходит до тех пор, пока рабочий орган 16 не достигнет заданного значения глубины и колеса машины 13 не коснутся дневной поверхности грунта. Ось колес 13 нагружается, датчик нагрузки на ось колес 12 отключается, контакты реле 5 и 11 размыкаются, а контакты реле 3 замыкаются и устройство для автоматической стабилизации положения ножевого рабочего органа прицепНОЙ строительной машины приходит в исходное состояние. При введении новых блоков и связей обеспечивается устранение подачи измерительным блоком на регулятор ложных сигналов, появляющихся при работе машины на уклонах, что позволяет учитывать любое отклонение угла наклона рельефа от горизонта, и, тем самым, повышается точность
