(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ
ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА САМОХОДНОЙ
ПЛАНИРОВОЧНОЙ МАШИНЫ
Г ...
Изобретение oтнocитJ:я к строительным машинам, в частности к автогрейдерам и планировщикам, имеющим устройства для автоматической стабилизации положения , рабочего органа, и может быть использовано в самоходных машинах, предназначен- 5 ных для планировки поверхности грунта.
Известны строительные машины с устройствами автоматической стабилизации . положения рабочего органа, содержащими лыжи (следящие колеса или щупы), измерительные блоки, блоки сравнения, усилители и исполнительные элементы 1.
Однако эти устройства сложны, обладают недостаточной точностью, требуют дополнительного оборудования и штатных единиц.;15
Известны устройства,;использующие для контроля и стабилизации положения рабочего органа системы с щуповым датчиком, щуп которого скользит по направляющей проволоке, натянутой вдоль планируемой jo трассы на специальных штативах 2.
Перед работой самоходной машины с такими устройствами требуется предварительная нивелировка трассы и установка
большого количества штатиов, что значительно повышает трудоемкость и стоимость планировочных работ и требует дополнительного высококвалифицированного обслуживаюшего персонала.
Наиболее близким по технической сущности к изобретению является устройство для автоматической стабилизации положения рабочего органа самоходной планировочной машины, содержащее регулятор положения рабочего органа и последовательно соединенные датчик уклона, сумматор и блок памяти 3.
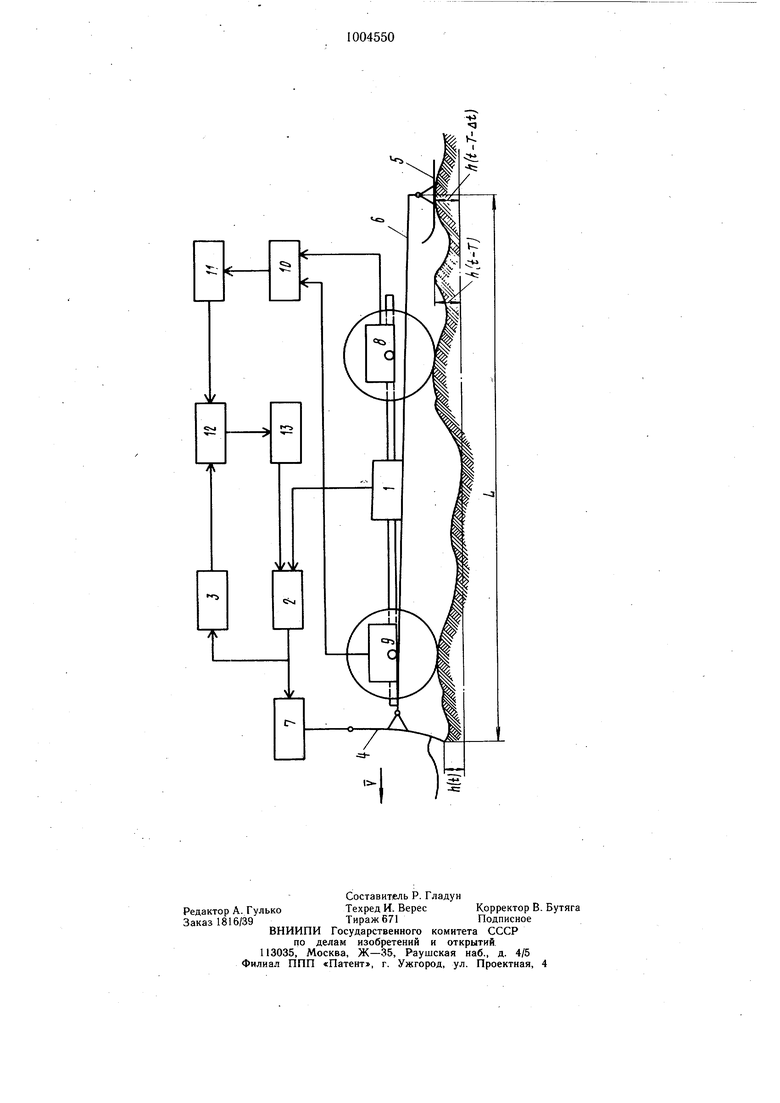
Недостатком известного устройства является то, что оно не учитывает погрешностей, возникающих при прохождении лыжи стабилизатора по оставшимся неровностям при изменении физико-мех&нических свойств грунта. Практически даже в установившемся режиме работы самоходной планировочной машины касательное тяговое усилие на ведущем колесе изменяется с некоторой амплитудой и частотой относительно среднего значения, определяемого сопротивлением копанию. При этом скорость движения планировочной машины непостоянна и зависит от физико-механических свойств грунта. Следовательно, фактическое время, за которое планировочная машина проходит расстояние L от кромки рабочего органа до точки опоры измерительного рычага на машину не совпадает с интервалом времени Т, через который на вход сумматора выдается из блока памяти зафиксированный сигнал. В момент времени t на первый вход сумматора с датчика уклона поступает сигнал, пропорциональный и h(t) - h(t - Т - At), где Ь(1-Т-.41)-величина неровности на спларованной поверхности, допущенная в момент времени Т -j-At; At -интервал времени, обусловленный изменением скорости движения планировочной машины вследствие изменения физико-механических свойств грунта. На второй вход сумматора с блока памяти поступает сигнал, пропорциональный (t - Т), тогда на выходе сумматора U4b« и;,+ u;;c-h(t) - h(t-T-At) + + h(t-Т) h(t) - hft-Т-М) - -h(t-T). Обозначим h(t-Т-At)- h(t-Т) через Ah, тогда UBbah(t) - ЛЬ. Из приведенного анализа следует, что сигнал на выходе сумматора содержит погрешность, вызванную изменением скоростного режима движения планировочной машины вследствие изменения физико-механических свойств грунта. Причем при движении планировочной машины эта ошибка накапливается, что приводит к снижению точности стабилизации. Целью изобретения является повышение точности стабилизации положения рабочего органа при изменении физико-механических свойств грунта. Поставленная цель достигается тем, что устройство для автоматической стабилизации положения рабочего органа самоходной планировочной машины, содержащее регулятор положения рабочего органа и последовательно соединенные датчик уклона, сумматор и блок памяти, снабжено датчиками скорости ведущих и ведомых колес и последовательно соединенными блоками сравнения, коррелятором, коммутатором и блоком задержки, выход которого подключен к второму входу сумматора, к второму входу коммутатора подключен выход блока памяти, а к двум входам блока сравнения подключены выходы датчиков скорости ведущих и ведомых колес На чертеже представлена блок-схема устройства для автоматической стабилизации положения рабочего органа самоходной планировочной машины. Устройство включает датчик 1 уклона, сумматора 2, блок 3 памяти, рабочий орган 4, лыжу 5, измерительный рычаг, регулятор 7 положения рабочего органа, датчик 8 скорости ведущих колес, датчик 9 скорости ведомых колес, блок 10, сравнения, коррелятор 11, коммутатор 12, блок 13 задержек. Выход датчика уклона 1 подключен к первому входу сумматора 2, выход которого подключен к входу блока 3 памяти и к входу регулятора 7 положения рабочего органа. Выход блока 3 памяти подключен к второму входу коммутатора 12, выход которого через блок 13 задержки подключен к вто: рому входу сумматора 2. Выходы датчиков 8 и 9 ведущих и ведомых колес через блок 10 сравнения и коррелятор 11 подключены к первому входу коммутатора 12. Устройство для автоматической стабилизации положения рабочего органа самоходной планировочной машины работает следующим образом. В идеальном случае при неизменных физико-механических свойствах грунта, когда отсутствует пробуксовка ведущих колес, скорости ведущих и ведомых колес равны и с выходом датчиков 8 и 9 скорости вращения ведущих и ведомых колес на входы блока 10 сравнения поступают равные по уровню и знаку сигналы. В результате этого на выходе блока 10 сравнения появляется нулевой сигнал, который подается на вход коррелятора 11, на выходе которого также нулевой сигнал, поступающий на второй вход коммутатора 12. Коммутатор 12 подключает блок 13 задержки с нулевым временем задержки сигнала. Таким образом, происходит подключение выхода блока 3 памяти к второму входу сумматора 2. Сигнал, пропорциональный величине неровности на спланированной поверхности h(t-Т), допущенной в момент времени t-Т и зафиксированный блоком 3 памяти , выдается через интервал времени Т, равный времени прохождения самоходной планировочной машиной расстояния L от кромки рабочего органа 4 до точки опоры измерительного рычага 6 на лыжу 5. Этот сигнал через блок 13 задержки подается на второй вход сумматора 2, на первый вход которого с датчика уклона 1 поступает сигнал, пропорциональный величине h(t) - -h(t-T). В сумматоре 2 сигналы складываются и на его выходе появляется сигнал, пропорциональный величине. UnwJhCt) - h(t-T)+h(t-T) h(t). Этот сигнал не содержит погрешности, вызванной прохождением лыжи 5 по допущенной ранее неровности на спланированной полосе высотой h(t-Т). Сигнал с выхода сумматора 2 поступает в блок 3 памяти и на регулятор 7 положения рабочего органа, который изменяет положение рабочего органа 4 в соответствии с сигналом, пропорциональным h(t).
В случае пробуксовки ведущих колес, вызванной изменением физико-механических свойств грунта, время прохождения самоходной планировочной машиной расстояния L от кромки рабочего органа 4 до точки опоры измерительного рычага 6 на лыжу 5 увеличивается на величину At и равно Т+ At. Скорости вращения ведущих и ведомых колес не равны и, следовательно, сигналы с датчиков 8 и 9 скорости вращения ведущих и ведомых колес, поступающие на входы блока 10 сравнения, не равны и с выхода блока 10 сравнения на вход коррелятора 11 поступает сигнал, пропорциональный величине пробуксковки. На выходе коррелятора 11 образуется .сигнал, пропорциональный величине At. Под действие этого сигнала, поступающего на второй вход коммутатора 12, происходит включение линии задержки между выходом блока памяти и , вторым входом сумматора 2, рассчитанной , на время задержки прохождения сигнала М. Всле)1,ствие этого, сигнал, пропорциональный величине неровности h(t-Т), допущенной в момент времени t - Т, с выхода блока 3 памяти на второй вход сумматора 2 поступает .через отрезок времени Т + At. т. е. в тот момент времени, когДа точка опоры измерительного рычага 6 на лыжу 5 достигает неровности высотой h(t-Т) и с выхода датчика 1 уклона на первый вход сумматора 2 поступает сигнал, пропорциональный величине неровности h(t)-h(t-Т). Эти сигналы суммируются, в результате чего на выходе сумматора 2 образуется сигнал, пропорциональный величине.
(t) - h(t-T) +h(t-T) h(t).
Этот сигнал не содержит как погрещности, возникающей при прохождении лыжей 5 по ранее оставленной- неровности на спланированной поверхности высотой h(t-Т), так и погрешности h(t-Т-At), вызванной изменением физико-механических свойств грунта.
Затем полученный сигнал поступает на регулятор положения рабочего органа, изменяющего его положение в соответствии с поступающим сигналом, пропорциональным h(t).
Введение новых боков и связей обеспечивает устранение подачи с сумматора на регулятор положения рабочего органа ложных сигналов, появляющихся вследствие изменения физико-механических свойств грун та, за счет чего повышается точность стабилизации положения органа самоходной планировочной машины. Это в свою очередь, позволяет повысить производительность труда на 20-25%. Получаемое при этом уменьшение числа проходов планировочной машины для достижения требуемого уровня качества планировки ведет к снижению стоимости проводимых работ.
Формула изобретения
Устройство для автоматической стабилизации положения рабочего органа самоходной планировочной машины, содержащее регулятор положения рабочего органа и последовательно соединенные датчик уклона, сумматор и блок памяти, отличающееся тем, что, с целью повышения точности стабилизации положения рабочего органа при .изменении физико-механических свойств грунта, оно снабжено датчиками
скорости ведущих и ведомых колес и последовательно соединенными блоками сравнения, коррелятором, коммутатором и блоком задержки, выход которого подключен к второму входу сумматора, к второму входу коммутатора подключен выход блока памяти, а к двум входам блока сравнения подключены выходы датчиков скорости ведущих и ведомых колес.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 595462, кл. Е 02 F 9/20.
2.Патент ФРГ № 1963491, кл. Е 02 F 3/76, опублик. 1968.
3.Авторское свидетельство СССР № 158923, кл. Е 02 F 9/20, 1962.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической стабилизации положения рабочего органа строительной машины | 1985 |
|
SU1244249A2 |
| Устройство для автоматической стаби-лизАции пОлОжЕНия РАбОчЕгО ОРгАНАСТРОиТЕльНОй МАшиНы | 1979 |
|
SU821661A1 |
| Устройство для автоматической стабилизации положения рабочего органа строительной машины | 1983 |
|
SU1101525A2 |
| Устройство для автоматического регулирования скольжения ведущих колес транспортного средства | 1985 |
|
SU1586925A1 |
| Устройство стабилизации угла наклона рабочего органа землеройно-планировочной машины | 1987 |
|
SU1520199A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Землеройно-мелиоративная машина | 1982 |
|
SU1104204A1 |
| Способ управления положением рабочего органа землеройной машины | 1982 |
|
SU1105576A1 |
| Цифровой коррелятор | 1976 |
|
SU636619A1 |