Изобретение относится к строительным машинам и может быть использовано в придепных машинах, предназначенных для бестраншейного заложения гибких линейных сооружений в грунт, в частности к прицепным кабелеукладочным агрегатам, имеющим устройства для автоматической стабилизации положения ножевого рабочего органа.
По основному авт.св. № 821661 известно устройство для автоматической стабилизации положения рабочего органа строительной машины, включающее установленные на раме машины измерительный блок и последовательно соединенные электронный усилитель, гидравлический усилитель и регулятор взаимного положения рамы и рабочего органа, блок памяти, блок сравнения, два дополнительных электронных усилителя, датчик нагрузки на ось колес и три исполнительных элемента, к выходам которых подключены выходы датчика нагрузки на ось колес, причем один выход измерительного блока через последовательно соединенные первый дополнительный усилитель и первый исполнительный элемент подключен к одному из входов блока сравнения, к другому входу которого через последовательно соединенные второй дополнительный электронный усилитель, второй исполнительный элемент, блок памяти и третий исполнительный элемент подключен второй выход измерительного блока, а выход блока сравнения соединен с входом основного электронного усилителя 1.
Известное устройство для автоматической стабилизации положения рабочего органа строительной машины не выдерживает его заданной глубины при забивании подрамиого пространства перед рабочим органом растительными остатками.
Ножевой рабочий орган в неплотных грунтах разрушает корни деревьев, кустарников и т.п., в результате чего остатки их задерживаются на ноже, продолжая движение вместе с ним. Остатки корней и дернины накапливаются перед рабочим органом между нижней частью рамы строительной машины и дневной поверхностью грунта. При большом их числе создается грунтовая призма волочения, которая поворачивает раму относительно линии тяги на угол d, уменьшая глубину хода рабочего органа. Одновременно происходит отрыв задних колес строительной машины от дневной поверхности грунта. Ось колес разгружается и датчик нагрузки на ось колес срабатывает, в результате чего происходит отключение блока памяти от измерительного блока и подключение соответствующих выходов измерительного блока и блока памяти к входам блока сравнения, на выходе которого появляется сигнал рассогласования, пропорциональный углу отклонения рамы
строительной машины относительно линии тяги, который усиливается основным электронным и гидравлическим усилителями и поступает на регулятор, приводя его в действие, при этом изменяется угол резания ножевого рабочего органа. Рабочий орган начинает заглубляться до тех пор, пока грунтовая призма волочения не спрессуется, препятствуя дальнейшему заглублению. При дальнейшей работе строительной
машины грунтовая призма волочения будет увеличиваться, поворачивая ее раму на все больший угол относительно линии тяги, так как угол отклонения рамы не только не уменьшается, но даже увеличивается и тем
самым увеличивается и сигнал рассогласования, устройство, отрабатывая его, меняет положение рабочего органа и тем, самым уменьшаей глубину его хода. Это приводит к необоснованному изменению глубины положения рабочего органа, что, в ковечном счете, снижает точность стабилизации.
Целыб изобретения является повышение точности стабилизации при образовании грунтовой призмы волочения.
Поставленная цель достигается тем, что в устройство для автоматической стабилизации рабочего положения органа строительной машины дополнительно введены элемент Я, блок помехозаЩиты, блок включения привода ножа, привод ножа, нож,
расположенный на рабочем органе между рамой строительной машины и дневной поверхностью г,рунта, дополнительный датчик нагрузки, и блок пороговых элементов, вход которого подключен к выходу блока сравнения, а выход к одному входу элемента И,
к другому входу которого подключен выход дополнительного датчика нагрузки, выход элемента И через блок помехозащиты соединен со входом блока включения привода ножа, выходы последнего подключены к приводу ножа, соединенному с ножом.
Образуюш.аяся грунтовая призма волочения поворачивает раму строительной машины относительно линии тяги на угол и одновременно оказывает давление на рабочий орган. Контролируя эти два параметра
и по их величине управляя ножом, который разрезает грунтовую призму волочения, можно добиться стабильности глубины хода рабочего органа.
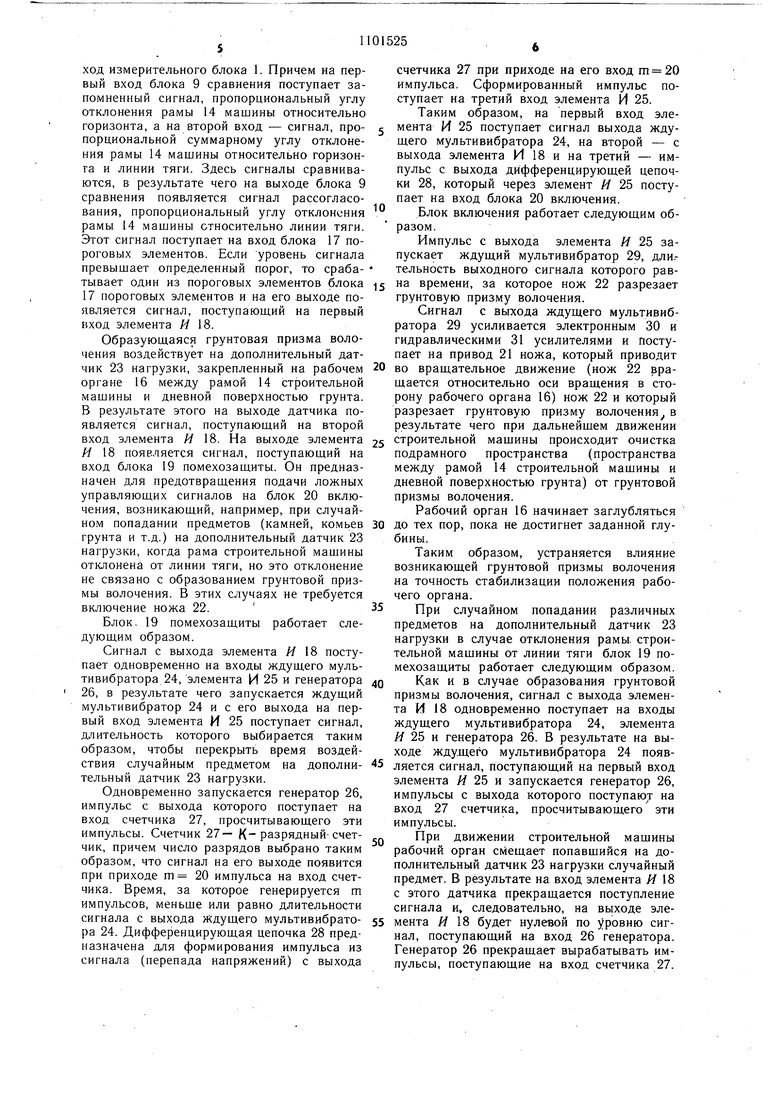
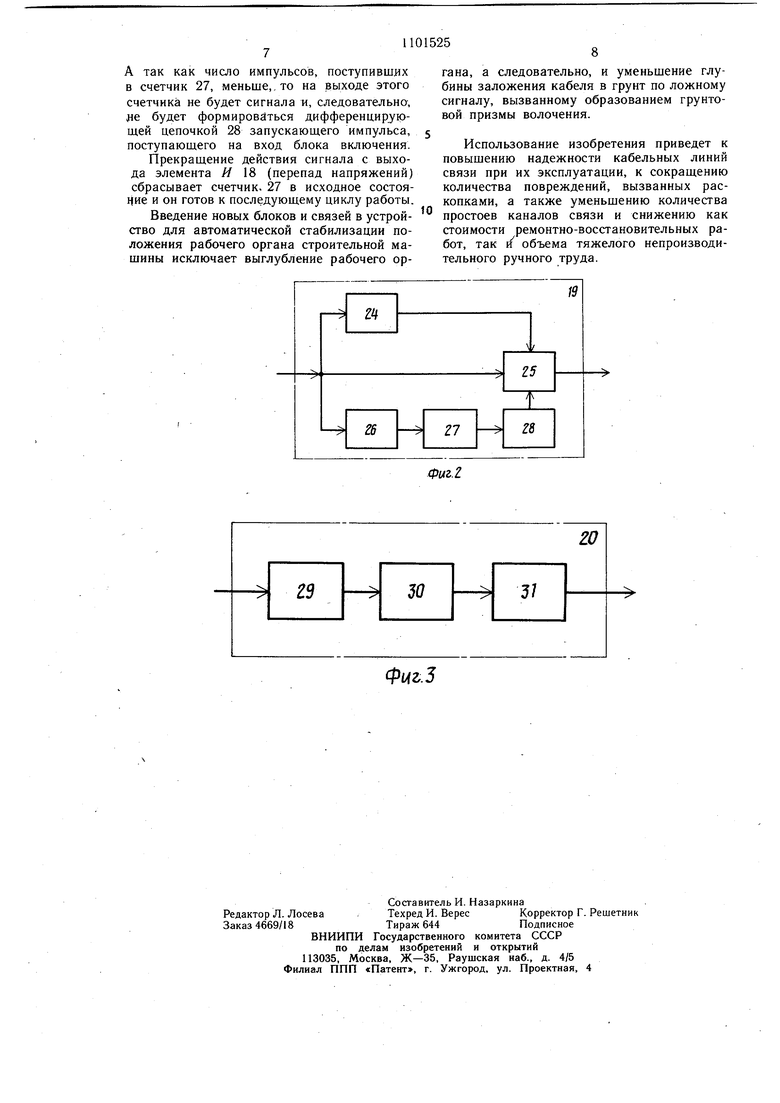
На фиг. 1 представлено устройство, общий вид; на фиг. 2 - пример выполнения блока помехозащиты; на фиг. 3 - пример выполнения блока включения.
Устройство содержит измерительный блок 1; первый дополните 1ьный электронный усилитель 2, исполнительные элементы
в виде, например, нормально замкнутых контактов реле 3 датчика нагрузки на ось колес, блок 4 памяти, исполнительные элементы в виде, например, нормально разомкнутых контактов реле 5 датчика нагрузки на ось колес, основной электронный усилитель 6, гидравлический усилитель 7, регулятор 8, блок 9 сравнения, второй дополнительный электронный усилитель 10, исполнительные элементы в виде, например, нормально разомкнутых контактов реле 11 датчика нагрузки на ось колес, датчик 12 нагрузки на ось колес, колесо 13 агрегата, раму 14 агрегата, точку 15 сцепа, рабочий орган 16, блок 17 пороговых элементов, элемент И 18, блок 19 помехозащиты, блок 20 привода ножа включения, привод 21 ножа, нож 22, дополнительный датчик 23 нагрузки.
Блок помехозащиты может содержать ждущий мультивибратор 24, элемент И 25, генератор 26, счетчик 27, дифференцирующую цепочку 28.
Блок включения может содержать ждущий мультивибратор 29, электронный усилитель 30, гидравлический усилитель 31.
Дополнительный датчик нагрузки может быть выполнен, например, в виде микровыключателя, псхмещенного в выемке на рабочем органе, закрытой подпружиненной пластиной. При давлении грунта на нее проис-. ходит смещение пластины и замыкание кнопки микрввыключателя.
Блок пороговых элементов может быть выполнен, например, из триггеров Шмидта.,
Первый выход измерительного блока 1 через первый дополнительный электронный усилитель 2 и исполнительные элементы в виде, например, нормально замкнутых контактов реле 3 датчика нагрузки на ось колес подключен к входу блока4 памяти.
Второй выход измерительного блока 1 через второй дополнительный электронный усилитель 10 и исполнительные элементы в виде, например, нормально разомкнутых контактов реле датчика нагрузки на ось колес 11 подключен ко второму входу блока 9 сравнения.
Выход блока 4 памяти через исполнительные элементы в виде, например, нормально разомкнутых контактов реле 5 датчика нагрузки на ось колес подключен к первому входу блока 9 сравнения.
К входу основного электронного усилителя 6 подключен выход блока 9 сравнения, а выход основного электронного усилителя 6 через гидравлический усилитель 7 подключен к регулятору 8.
Выход блока 9 сравнения подключен к первому входу элемента Я 18.
К втором у входу элемента Я 18 подключен выход дополнительного датчика 23 нагрузки, а выход элемента И через лок 19 помехозащиты и блок 20 включения привода ножа подключен к приводу ножа 21, который приводит в движение нож 22.
В некоторых случаях для очистку подрамного пространства от грунтовой призмы волочения недостаточно одного срабатывания ножа. Поэтому блок пороговцх элементов состоит из нескольких элементов с различными уровнями срабатывания. При достижении первого уровня срабатывания включается система привода ножа и он разрезает грунтовую призму волочения-. Если при дальнейшей работе строительной машины продолжается процесс образования грунтовой призмы волочения и рама машины отклоняется на все больший угол относительно линии тяги, то срабатывает следующий порог, включается система привода ножа и он разрезает грунтовую призму волочения. И так будет продолжаться, пока подрамное пространство не очистится. Величина выглубления рабочегооргана определяется выражением
H(H + R)(l-l-ctg0oSino -cosd), где Н - номинальная глубина хода рабочего органа в грунте; R - радиус качения колеса строительной
машинь ;
Q-угол, образованный рамой строительной машины и линией, соединяющей точку прицепа и носок рабочего органа.
Порог срабатывания определяется из выражения
ч/...- 0,05-ьК-0,05 (R+H)ctgeo
где k - номер порогового элемента.
Значения k и Н при определении порога должны даваться в метрах.
Устройство для автоматической стабилизации положения рабочего органа строительной машины работает следующим образом.
При отсутствии образования грунтовой, призмы волочения работа устройства аналогична работе устройства для автоматической стабилизации положения рабочего органа по основному изьбретению.
При образовании грунтовой призмы волочения колеса строительной машины 13 отрываются от дневной поверхности грунта и рама 14 машины поворачивается относительно линии тяги на $тол Ы. Ось колес разгружается, датчик 12 нагрузки на ось колес срабатывает, вследствие чего размыкаются нормально замкнутые контакты реле 3, отключая блок 4 памяти от первого выхода измерительного блока 1. Одновременно замыкаются нормально разомкнутые контакты реле 5 и 11, тем самым происходит подключение выхода блока 4 памяти через замкнутые контакты реле 5 к первому входу блока 9 сравнения, к второму входу которого через замкнутые контакты реле 11 и второй дополнительный электронный усилитель 10 подключается второй выход измерительного блока 1. Причем на первый вход блока 9 сравнения поступает запомненный сигнал, пропорциональный углу отклонения рамы 14 машины относительно горизонта, а на второй вход - сигнал, пропорциональной суммарному углу отклонения рамы 14 машины относительно горизонга и линии тяги. Здесь сигналы сравниваются, в результате чего на выходе блока 9 сравнения появляется сигнал рассогласования, пропорциональный углу отклонения рамы 14 машины относительно линии тяги. Этот сигнал поступает на вход блока 17 пороговых элементов. Если уровень сигнала превышает определенный порог, то срабатывает один из пороговых элементов блока 17 пороговых элементов и на его выходе появляется сигнал, поступающий на первый вход элемента И 18.
Образующаяся грунтовая призма волочения воздействует на дополнительный датчик 23 нагрузки, закрепленный на рабочем органе 16 между рамой 14 строительной машины и дневной поверхностью грунта. В результате этого на выходе датчика появляется сигнал, поступающий на второй вход элемента И 18. На выходе элемента И 18 появляется сигнал, поступающий на вход блока 19 помехозащиты. Он предназначен для предотвращения подачи ложных управляющих сигналов на блок 20 включения, возникающий, например, при случайном попадании предметов (камней, комьев грунта и т.д.) на дополнительный датчик 23 нагрузки, когда рама строительной машины отклонена от линии тяги, но это отклонение не связано с образованием грунтовой призмы волочения. В этих случаях не требуется включение ножа 22.
Блок. 19 помехозащиты работает следующим образом.
Сигнал с выхода элемента И 18 поступает одновременно на входы ждущего мультивибратора 24, элемента И 25 и генератора 26, в результате чего запускается ждущий мультивибратор 24 и с его выхода на первый вход элемента И 25 поступает сигнал, длительность которого выбирается таким образом, чтобы перекрыть время воздействия случайным предметом на дополнительный датчик 23 нагрузки.
Одновременно запускается генератор 26, импульс с выхода которого поступает на вход счетчика 27, просчитывающего эти импульсы. Счетчик 27- К разрядный-счетчик, причем число разрядов выбрано таким образом, что сигнал на его выходе появится при приходе ш 20 импульса на вход счетчика. Время, за которое генерируется ш импульсов, меньше или равно длительности сигнала с выхода Ждущего мультивибратора 24. Дифференцирующая цепочка 28 предназначена для формирования импульса из сигнала (перепада напряжений) с выхода
счетчика 27 при приходе на его вход т 20 импульса. Сформированный импульс поступает на третий вход элемента И 25. Таким образом, на первый вход элемента И 25 поступает сигнал выхода ждущего мультивибратора 24, на второй - с выхода элемента И 18 и на третий - импульс с выхода дифференцирующей цепочки 28, который через элемент И 25 поступает на вход блока 20 включения.
Блок включения работает следующим образом.
Импульс с выхода элемента И 25 запускает ждущий мультивибратор 29, дли.тельность выходного сигнала которого равна времени, за которое нож 22 разрезает грунтовую призму волочения.
Сигнал с выхода ждущего мультивибратора 29 усиливается электронным 30 и гидравлическими 31 усилителями и поступает на привод 21 ножа, который приводит
во вращательное движение (нож 22 вращается относительно оси вращения в сторону рабочего органа 16) нож 22 и который разрезает грунтовую призму волочения в результате чего при далькейщем движении
строительной машины Происходит очистка подрамного пространства (пространства между рамой 14 строительной машины и дневной поверхностью грунта) от грунтовой призмы волочения.
Рабочий орган 16 начинает заглубляться
до тех пор, пока не достигнет заданной глубины.
Таким образом, устраняется влияние возникающей грунтовой призмы волочения на точность стабилизации положения рабочего органа.
При случайном попадании различных предметов на дополнительный датчик 23 нагрузки в случае отклонения рамы, строительной машины от линии тяги блок 19 помехозащиты работает следующим образом.
Как и в случае образования грунтовой призмы волочения, сигнал с выхода элемента И 18 одновременно поступает на входы ждущего мультивибратора 24, элемента Я 25 и генератора 26. В результате на выходе ждущего мультивибратора 24 появляется сигнал, поступающий на первый вход элемента Я 25 и запускается генератор 26, импульсы с выхода которого поступаю7 на вход 27 счетчика, просчитывающего эти импульсы.
При движении строительной мащины рабочий орган смещает попавшийся на дополнительный датчик 23 нагрузки случайный предмет. В результате на вход элемента И 18 с этого датчика прекращается поступление сигнала и, следовательно, на выходе элемента И 18 будет нулевой по уровню сигнал, поступающий на вход 26 генератора. Генератор 26 прекращает вырабатывать импульсы, поступающие на вход счетчика 27. А так как число импульсов, поступивших в счетчик 27, меньше,, то на выходе этого счетчика не будет сигнала и, следовательно, ле будет формироваться дифференцирующей цепочкой 28 запускающего импульса, поступающего на вход блока включения. Прекращение действия сигнала с выхода элемента И 18 (перепад напряжений) сбрасывает счетчик. 27 в исходное состояние и он готов к последующему циклу работы. Введение новых блоков и связей в устройство для автоматической стабилизации положения рабочего органа строительной машины исключает выглубление рабочего органа, а следовательно, и уменьшение глубины заложения кабеля в грунт по ложному сигналу, вызванному образованием грунтовой призмы волочения. Использование изобретения приведет к повышению надежности кабельных линий связи при их эксплуатации, к сокращению количества повреждений, вызванных раскопками, а также уменьщению количества простоев каналов связи и снижению как стоимости ремонтно-восстановительных работ, так объема тяжелого непроизводительного ручного труда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической стабилизации положения рабочего органа строительной машины | 1985 |
|
SU1244249A2 |
| Устройство для автоматической стаби-лизАции пОлОжЕНия РАбОчЕгО ОРгАНАСТРОиТЕльНОй МАшиНы | 1979 |
|
SU821661A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| Регулятор натяжения | 1985 |
|
SU1284926A1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1988 |
|
SU1587149A1 |
| Устройство для автоматической стабилизации положения рабочего органа самоходной планировочной машины | 1980 |
|
SU1004550A1 |
| Рабочий орган бульдозера | 1987 |
|
SU1481338A1 |
| Устройство для управления вибротрамбующей машиной | 1975 |
|
SU527494A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
| Устройство противоугонной сигнализации транспортного средства | 1988 |
|
SU1720908A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА СТРОИТЕЛЬНОЙ МАШИНЫ по авт. св. № 821661, отличающееся тем, что, с целью повышения точности стабилизации при образовании грунтовой призмы волочения, в него дополнительно введены элемент И, блок помехозащиты, блок включения привода ножа, привод ножа, нож, расположенный на рабочем органе между рамой строительной машины и дневной поверхностью грунта, дополнительный датчик нагрузки и блок пороговых элементов, вход которого подключен к выходу блока сравнения, а выход к одному входу элемента И, к другому входу которого подключен выход дополнительного датчика нагрузки, выход элемента И через блок помехозащиты соединен со входом блока включения привода ножа, выходы последнего подключены к .приводу ножа, соединенному с ножом. сл ю ел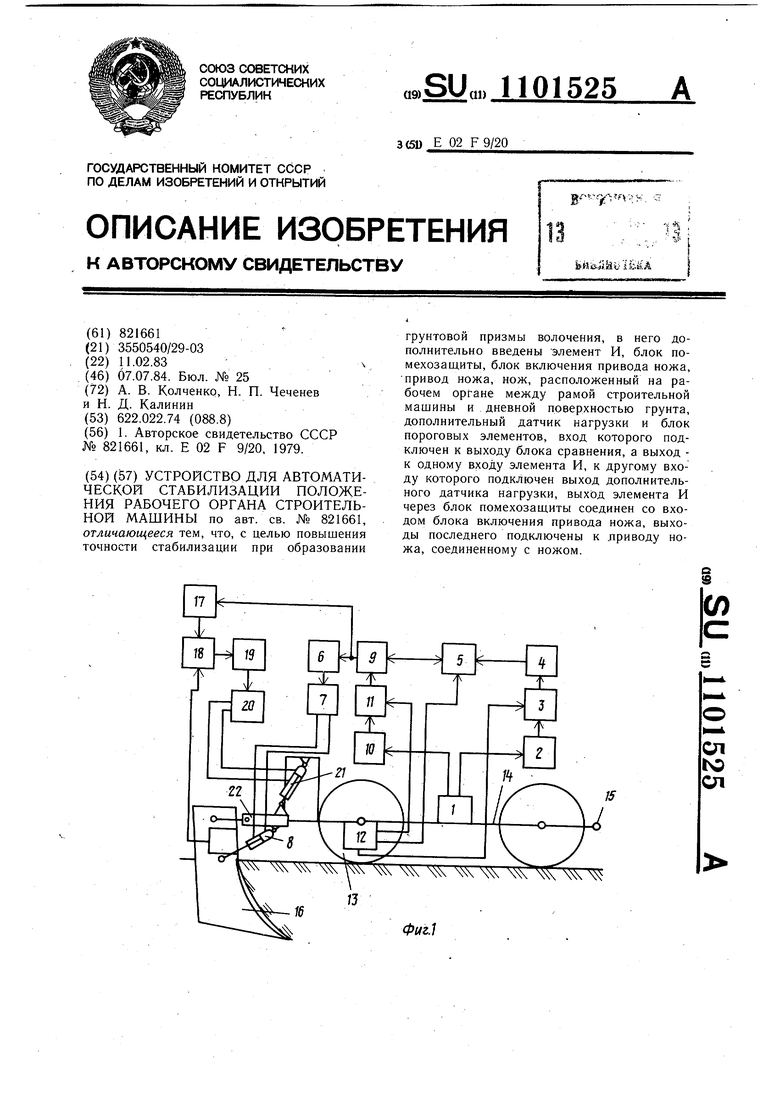
фцг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматической стаби-лизАции пОлОжЕНия РАбОчЕгО ОРгАНАСТРОиТЕльНОй МАшиНы | 1979 |
|
SU821661A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
