Изобретение относится к измерению параметров движения, в частности к линейным акселерометрам с жидкостным инерционным элементом.
Целью изобретения является повышение точности измерения ускорения путем ослабления влияния капиллярных сил.
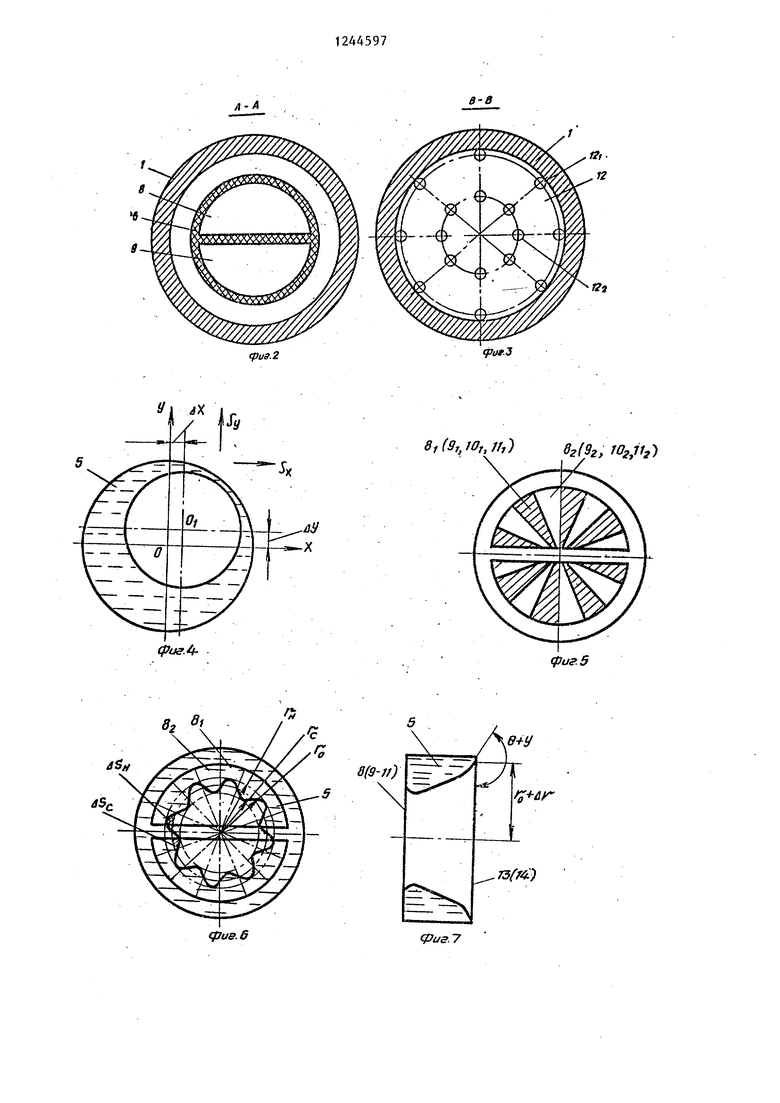
На.фиг.1 .представлена конструктивная схема предлагаемого акселерометра; на фиг.2 разрез А-Л на фиг.1; на фиг.З - рйзрез В-В на фиг.1; на фпг.4 - положение свободной поверхности жидкости при наличии радиальных составляющих jj и jy вектора линейного ускорения; на фиг.З - расположение секторов в пластинах датчика положения жидкости; на фиг.6 - вид свободной поверхности жидкости в месте ее контакта с пластинами датчика положения жидкости при отсутствии указанных вьшш состав ,ляюпщх ускорения; на фиг.7 - 8 форма свободной поверхности жидкости между сектора№1 пластин и секторами торцов общего выходного элемента, выполненных соответственно из материала, смачиваемого и не смачиваемого сидкостыо; на фиг.9 - структурная схема акселерометра измерительной системы.
Акселерометр (фиг.1-3) содеряшт щшиндрический ротор 1 с полостью, привод 2 постоянной скорости движения, опоры 3 и 4 ротора, диэлектрическую жидкость 5, «изолирующие цилиндры 6 и 7 датчика положегних жид- .кости, диф4)ерен1щальные электроды 8-11 датчика положения жидкости, общий 1Ц1ЛИндрическ1п 1 элемент 12 с электродами 13 и 14, являющимися общими электродами датчика положения, трансформаторы 15-17 измерительной системы, генераторы 18-19, усилитель 20, кольцевой электрод 21, демодуляторы 22-25, двухфазный генератор 26.
Изолирующие цилиндры 6 и 7 установлены в торцах ротора 1 и имеют дифференциальные электроды, например, 8 и 9 (фиг.2). В цилиндрическом элементе 12 вьтолнены осевые отверстия 12 и 122. (фиг.З), служащие для перетекания жидкости и выравнивазпш
Д 1вления в полости ротора 1. Кольце- 55 рения j с проекциями j, j i и j на
вой электрод 21 установлен в корпусе ротора 1 и электрически изолирован от нет о. -Электроды 8-11 и общие элеоси координат приводит к изменению формы свободной поверхности диэлектрической жидкости 5. Наличие ра
ктроды 13 и 14 цилиндрического элемента 12 выполнены в виде секторов, причем одна половина этих секторов выполнена из материала, смачиваемого жидкостью 5, а другая - из материала, не смачиваемого жидкостью 5. Эти секторы в каждом электроде установлены чередующимися и электрически связаны между собой.
Двухфазный генератор 26 установлен на общем валу с ротором 1 (фиг.1).. Один выход двухфазного генератора 26 (фиг.9) соединен с вторым входом демодулятора 23, второй выход - с ВТО5 рым входом демодулятора 24, первые входы этих демодуляторов соединены с выходом демодулятора 22, первый вход которого соединен с выходом усилителя 20, кольцевым электродом 21
0 и первым входом демодулятора 25. Второй вход демодулятора 22 соединен с . выходом генератора 19 и с на.чало первичной обмотки трансформатора 15. Второй вход демодулятора 25 соединен
5 с выходом генератора 18 и с началами первичных обмоток трансформаторов 16 -и 17, Концы этих обмоток соединены с концом первичной обмотки трансформатора 15, со средним выводом
0 ,вторичной обмотки этого трансформатора и с корпусом акселерометра. Начало вторичной обмотки трансформатора 15 и его конец соединены соответственно со средними выводами вторичных обмоток трансформаторов 16 и 17, 11ачала вторичных обмоток которых соединены соответственно с пластинами 8 и 9, а концы этих обмоток - соответственно с пластинами 10 и Л. Общие электроды 1щлиндри- ческого элемента 12 электрически соединены с входом усилителя 20.
5
0
Акселерометр работает следующим образом.
Ротор 1 с помощью привода 2 приводится в равномерное вращение. При этом под действием,центробежных сил диэлектрическая жидкость 5 сосредотачивается к периферийной Части по- лости ротора 1. Более быстрому перетеканию диэлектрической жидкости 5 способствует наличие каналов в общем выходном элементе 12.
Наличие вектора линейного ускооси координат приводит к изменению формы свободной поверхности диэлектрической жидкости 5. Наличие радиальных составляющих j j и jj ускорения приводит к смещению своббдной поверхности диэлектрической жидкости 5 в соответствующем радиальном направлении на величины Дх иДу соответственно, которые пропорциональны величинам этих проекций (фиг.4). Наличие составляюп1 jj вектора линейного ускорения j приводит к деформации свободной поверхности ди- электрической жидкости 5 симметрично .относительно оси ротора 1, а действие i капиллярных сил приводит к дополнительной деформации свободной поверхности диэлектрической жидкости 5 в месте ее контакта с электродами 8-11 и 13 и 14.
Вследствие того, что секторы 8/, и 8 электрода 8 расположены рядом и чередуются, деформация свободной поверхности жидкости 5 на поверхност тях этих секторов будет носить знако- переменньй характер относительно уровня Го (фиг.6), который соответствует отсутствию капиллярных сил. При этом форма свободной поверхности жидкости 5 между электродами и 13 и 14 будет иметь вид, изображенный на фиг.7 и 8.
Измерение информационных параметров, т.е. величинах и лу осуществляется с помощью измерительной системы (фиг,9). При этом электроды 8-11 и 13 и 14 образуют четыре конденсатора, первый из которых составляют электроды 8 и 13, второй и 13, третий и четвертьш - соответственно электродам 10 и, 14, 11 и 14. Эти конденсаторы, а также трансформаторы 16 и 17 образуют две мостовых схемы. Для разделения информационных сигналов, несущих информацию о составляющих jjj., jy и j, осуществляет питание трансформатора 15 с частотой f, а трансформаторов 16 и 17 с час- тотой fj 19 и 18. При этом электрический сигнал снимается с общего электрода цилиндрического элемента 12 и через усилитель 20 подается на выходы демодуляторов 22 и 25, на вторые входы которых подается сигнал опорной частоты f и f соответствен
244597
но. Для повышения стабильности коэффициента усиления усилителя 20 используется емкостньш канал обратной связи путем подачи выходного сигнала этого
5 усилителя через кольцевой электрод 21 на общий элемент 12.
Сигнал, снимаемый с выхода демодулятора 25, будет пропорционален осевой составляющей ja вектора линейно10 го ускорения, а для выделения радиальных составляющих j и jy необходима вторичная демодуляция с опорной частотой, равной частоте вращения ротора 1 . С этой целью сигналы частоты,
J5 равной частоте вращения ротора 1, с выхода двухфазного генератора 26 (сигналы сдвинуты по фазе на 90 ) поступают на вторые входы демодуля-. торов 23 и 24. Па первые входы этих
20 демодуляторов поступает сигнал с выхода демодулятора 22. В этом случае выходные сигналы демодуляторов 23 и 24 будут пропорциональны соответственно составляющим JX и jy.
25
Формула изобретения
35
Акселерометр, содержащий привод постоянной скорости вращения, ци- 30 линдрический полый ротор, частично заполненный диэлектрической жидкостью и имеющий в средней части полости . цилиндрический элемент с общими, а по торцам ротора цилиндрические элементы с дифференциальными электродами датчика положения жидкости, подклю- ченны ш к схеме измерения, отличающийся тем, что, с целью повьщгения точности измерения ускорения путем ослабления влияния капиллярных сил, общие и дифференциальные электроды датчика положения жидкости выполнены в виде чередующихся по окружности пластин-секторов иэ материала, не смачиваемого и смачиваемого жидкостью, причем все пластины каждого электрода объединены между собой электрически, а пластины всех электродов, выполненных из одноименного материала, равны между собой по площади и расположены напротив друг друга.
40
45
50
Л-А
в-в
at
(риз.2
fpiif.3

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный измеритель неэлектрических величин | 1986 |
|
SU1372182A1 |
| АКСЕЛЕРОМЕТР | 2011 |
|
RU2461838C1 |
| Емкостный датчик перемещений | 2020 |
|
RU2750131C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2015 |
|
RU2579156C1 |
| Сейсмометр | 2019 |
|
RU2717165C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| Устройство для измерения малых углов наклона | 1982 |
|
SU1059425A1 |
| Акселерометр | 1982 |
|
SU1045135A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2246735C1 |
| МУЛЬТИСЕНСОР | 1996 |
|
RU2104559C1 |

Изобретение относится к измерению параметров движения. Цель изобретения - повьппение точности измерения ускорения путем ослабления влияния капиллярных сил. В полости цилиндрического ротора 1 по его оси установлен общий цилиндрический элемент 12 с электродами 13, 14, яв- лякщимися общими электродами датчика положения, содержащего изолирующие I цилиндры 6,7. Дифференциальные 8-11 и общие 13, 14 электроды датчика положения выполнены в виде чередующихся по окрзпкности пластин-секторов из не смачиваемого и смачиваемого жидкостью материалов. Пластины всех электродов из одного материала равны по площади и расположены напротив друг друга. При наличии ускорения изменяется форма свободной поверхности химической жидкости 5, причем деформация поверхности жидкости в местах контакта с поверхностями секторов электродов будет носить знакопеременный характер относительно уровня, соответствующего отсутствию капиллярных сил. Информационные параметры определяются измерительной системой. 9 ил. (Л /2 L 1 ю 4 4 СП со J
срие.4Si(9jlOr,//j
V
, Юг.Щ
(риг. 5
8, В{
Л 5ц
8(9-Jt)
t-ar
.ЛЗ/Лс
(pus. 6
(риг. 7
8(9-ff ) у
г„-л
l3ffJ
Редактор Ю.Середа
Составитель К.Лукомский
Техред Л.Олейник Корректор С.Шекмар
3910/48
Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| Акселерометр | 1973 |
|
SU475552A1 |
| Патент Франции № 1409016, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
