Область техники
Изобретение относится к области приборостроения и может быть использовано в системах ориентации, навигации и управления таких подвижных объектов, как самолет, корабль, автомобиль, микроробот, и других, где требуется информация об угловых скоростях, получаемая с помощью микромеханического гироскопа.
Предшествующий уровень техники
В настоящее время предложены и используются различные конструкции вибрационных микромеханических гироскопов. Принцип действия этих гироскопов основан на использовании инерционной массы в упругом подвесе, которая приводится, например, в колебательное движение. При вращении такой системы по оси, перпендикулярной оси колебаний, на массу действует сила Кориолиса, создающая момент, ортогональный оси колебаний и оси вращения системы и приводящий к угловым смещениям массы, пропорциональным угловой скорости вращения системы. Например, известна конструкция микромеханического гироскопа по патенту США №5535902 с чувствительным элементом в виде кольца, закрепленного с помощью растяжек на центральной стойке, связанной с корпусом через упругие элементы. С помощью электростатических датчиков силы кольцо приводится в колебательное движение вокруг оси растяжек. Для съема информации используется емкостной преобразователь. Недостатком подобных микромеханических гироскопов является недостаточно высокая точность из-за малой величины кинетического момента ввиду того, что их роторы совершают не вращательное, а колебательное движение. В силу этого амплитудное значение кинетического момента роторов составляет величину 10-8-10-9 Н м сек. Поэтому повышение точности этого класса гироскопов достигается за счет снижения возмущающих воздействий, а осуществление этой меры требует больших конструктивных и технологических затрат.
Известен микромеханический гироскоп по патенту РФ №2158903, 2000 г., принятый за прототип, в котором дисковый миниротор (с диаметром 8 мм) совершает непрерывное вращательное движение в неконтактном (электростатическом) подвесе. Преимуществом такого устройства является возможность обеспечения при сравнимых с вибрационными гироскопами размерах значительно большей (на несколько порядков) величины кинетического момента, благодаря чему предоставляется возможность существенного повышения точности микрогироскопа.
Электростатический гироскоп-прототип содержит ротор в виде круглой пластины с отверстиями, имеющий электропроводящие части и окруженный статорами, в состав которых входят основной центральный статор с экваториальными поддерживающими плоскими электродами на цилиндрической рабочей поверхности, дополнительные нижний и верхний планарные (плоские) статоры с осевыми поддерживающими электродами на их поверхностях, а также нижний и верхний статоры вращающего момента в виде плоских электродов. Каждый из двух соседних плоских электродов любого из статоров подвеса вместе с последовательно включенными с ними источником высокочастотного напряжения и дросселем образуют элемент электрорезонансного подвеса ротора с измерительной цепочкой. Нижний и верхний планарные статоры вращающего момента соединены в три секции. Секции соединены с тремя фазами источника переменного тока. В схему обработки информации введены десять эталонных резисторов, десять фазочувствительных выпрямителей, три сумматора, пять устройств вычитания, пять масштабирующих элементов. Гироскоп обеспечивает измерение двух компонентов угловой скорости. Основным недостатком такого гироскопа является низкая точность из-за формы ротора в виде диска, что приводит к значительным начальным моментам, действующим на ротор, ввиду нормального к его поверхности положения поддерживающих сил подвеса, обусловливающих большие плечи моментов относительно центра тяжести ротора. Другой существенный недостаток прототипа - низкая перегрузочная способность ввиду массивности диска ротора. Также следует признать несовершенство измерительной структуры, основанной на определении токов десяти резонансных LC-контуров, требующих точной настройки и стабильности по отношению друг к другу.
Сущность изобретения
Технический результат изобретения заключается в повышении точности и перегрузочной способности микромеханического электростатического гироскопа с непрерывно вращающимся ротором.
Технический результат достигается тем, что в электростатическом гироскопе, содержащем ротор, основной статор с поддерживающими электродами на цилиндрической рабочей поверхности, два дополнительных статора с электродами и привод вращения ротора, ротор выполнен в виде кольца со сферической наружной (внешней) поверхностью, дополнительные статоры, прилегающие к основному центральному статору, выполнены с электродами на сферических рабочих поверхностях или на конических поверхностях, касательных к сферической поверхности ротора, а привод вращения ротора выполнен в виде обращенного статора с обмотками и внешней рабочей поверхностью, расположенной напротив внутренней цилиндрической поверхности кольца ротора, которое может быть выполнено с шириной В, удовлетворяющей условию
А>В>С,
где А - толщина пакета из трех статоров,
С - толщина основного статора.
Перечень фигур и чертежей
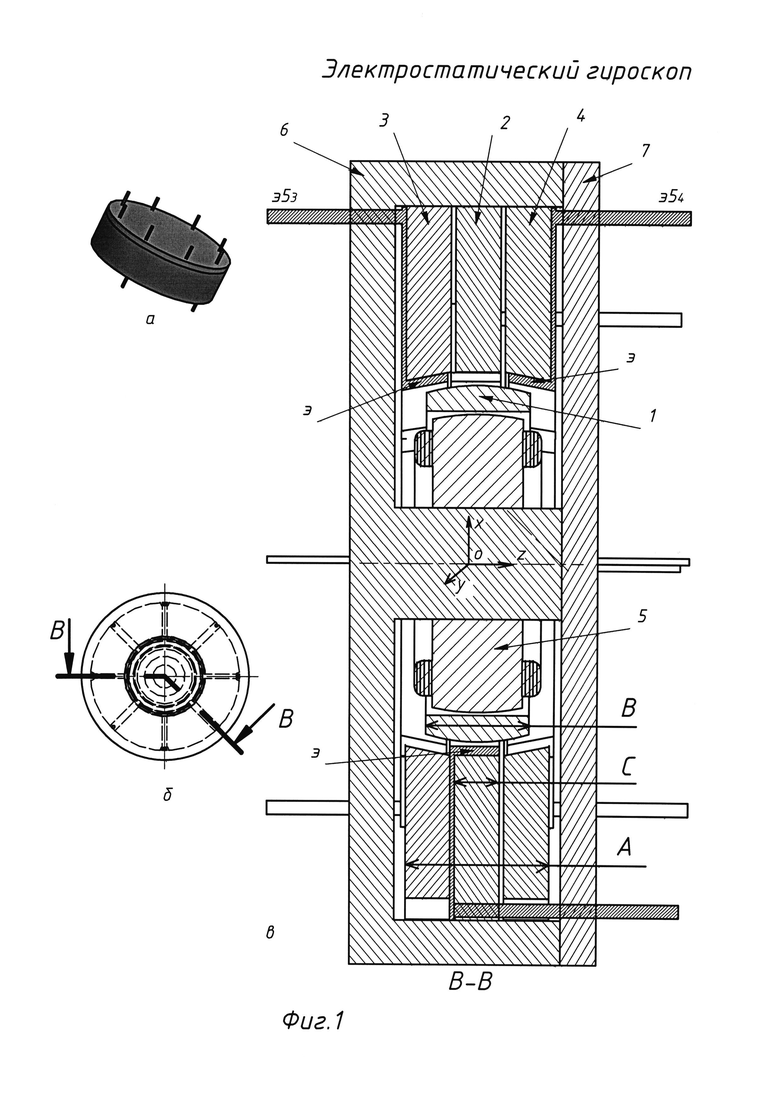
На фиг. 1 приведен общий вид гироскопа «а», чертеж в плане с видимыми скрытыми линиями «б», вид в разрезе «в».
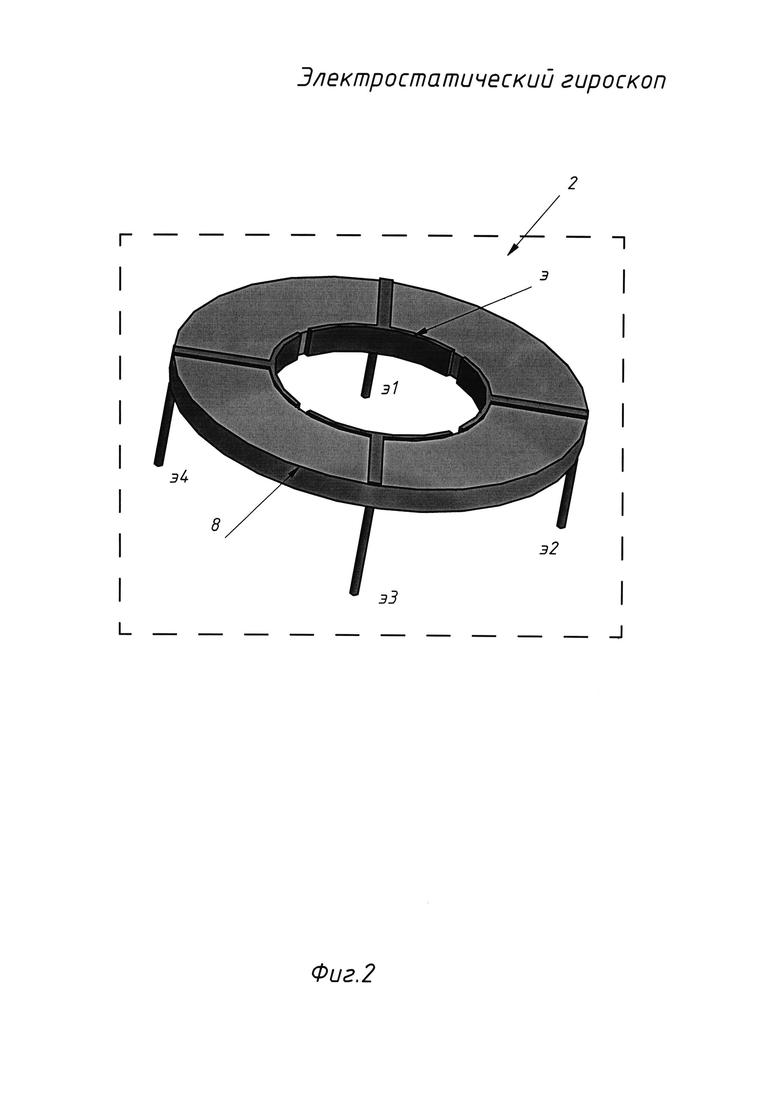
На фиг. 2 показан основной (центральный) статор с поддерживающими электродами на цилиндрической рабочей поверхности и выводами от электродов для подключения схемы управления подвесом ротора.
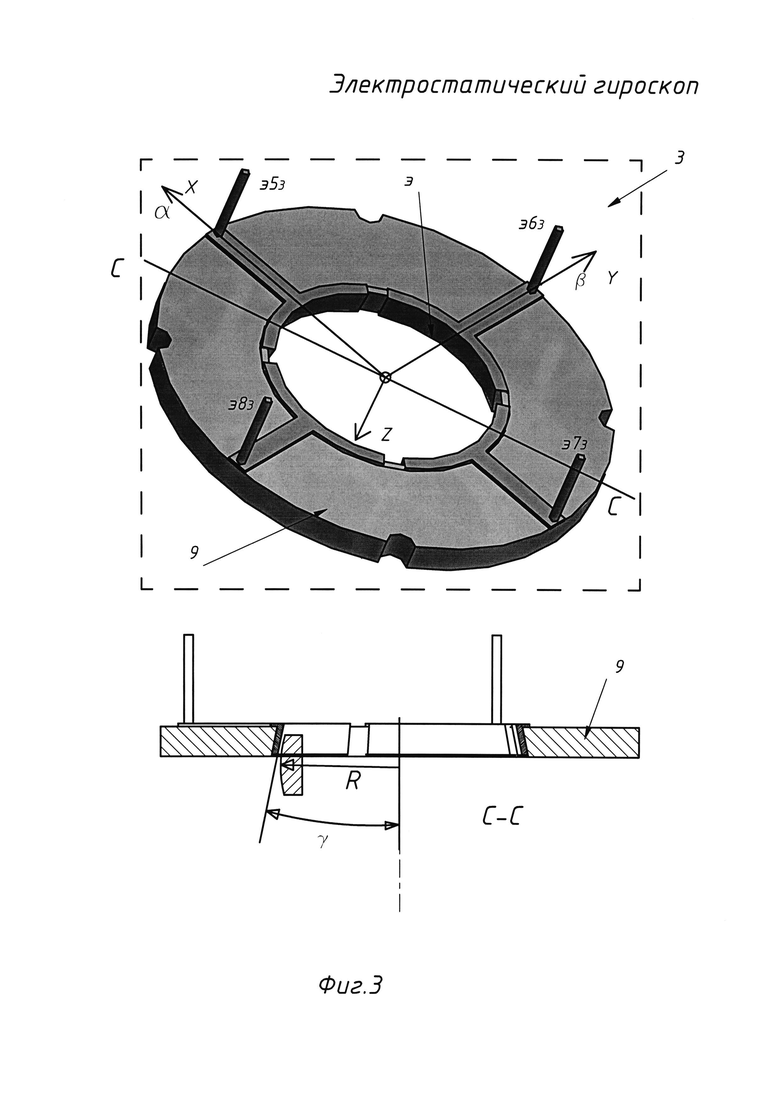
На фиг. 3 показан дополнительный статор с электродами на конической рабочей поверхности, касательной к сферической поверхности ротора.
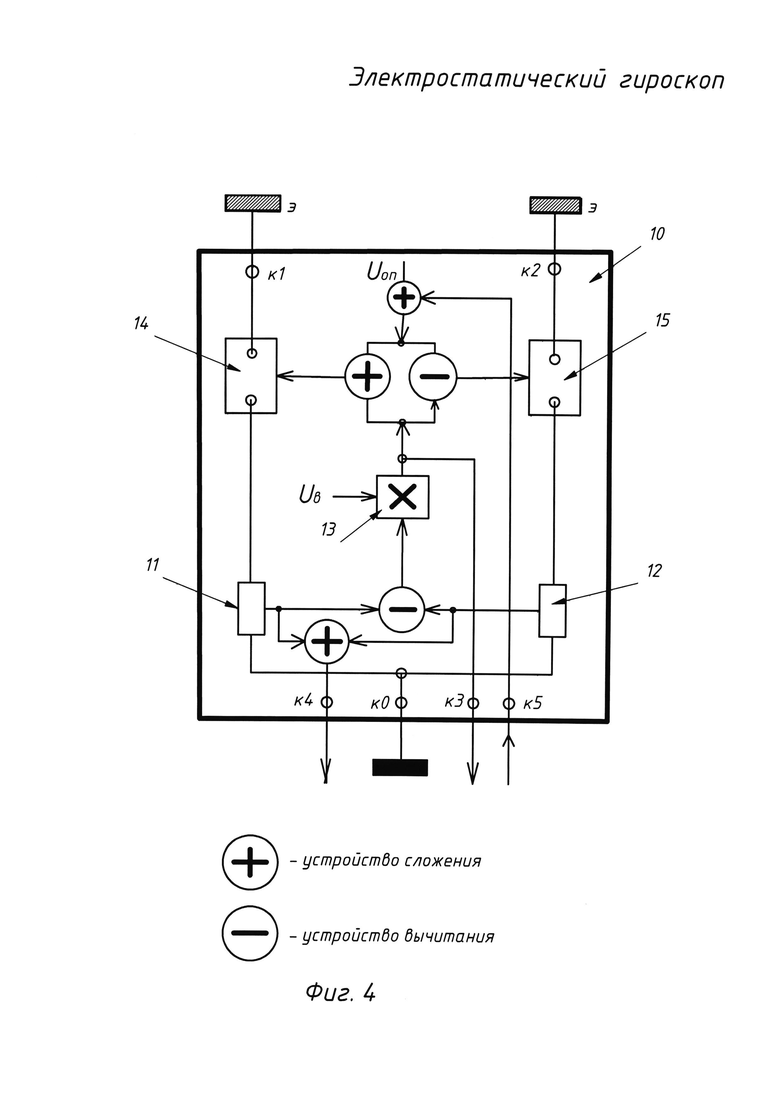
На фиг. 4 представлена блок-схема одиночной ячейки электронной схемы управления подвесом ротора для двух диаметрально противоположно расположенных электродов.
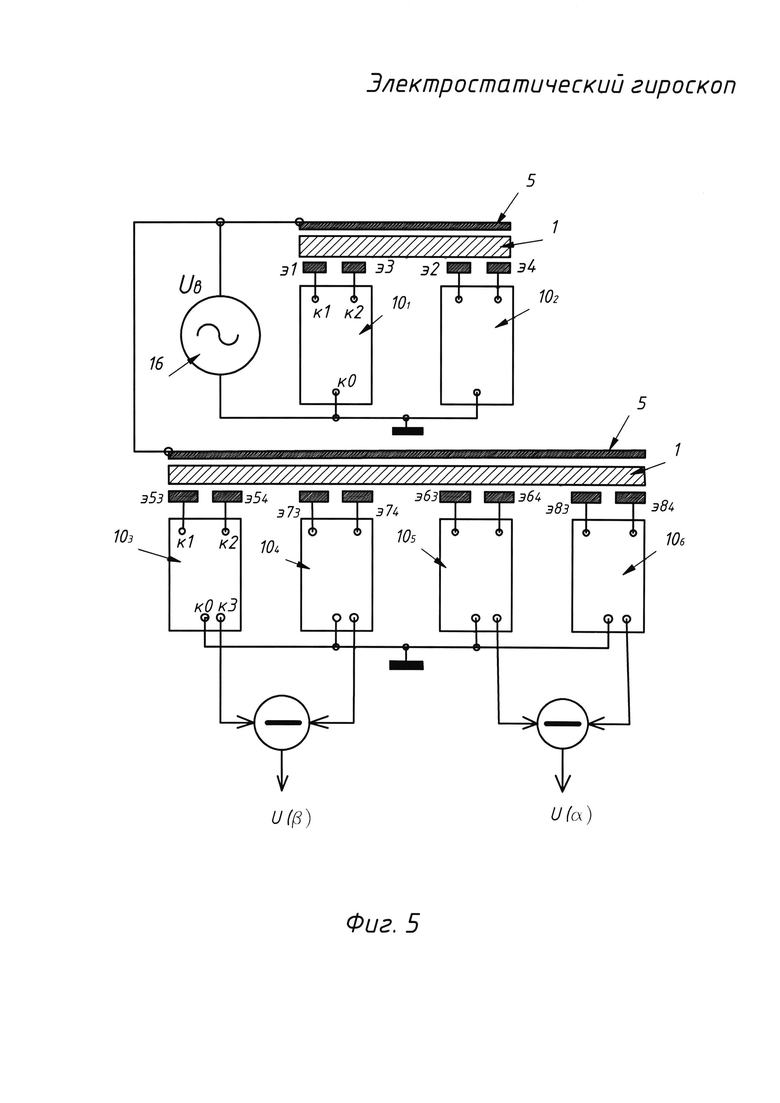
На фиг. 5 приведена блок-схема электроники гироскопа для простого варианта использования без датчиков момента для угловой стабилизации ротора.
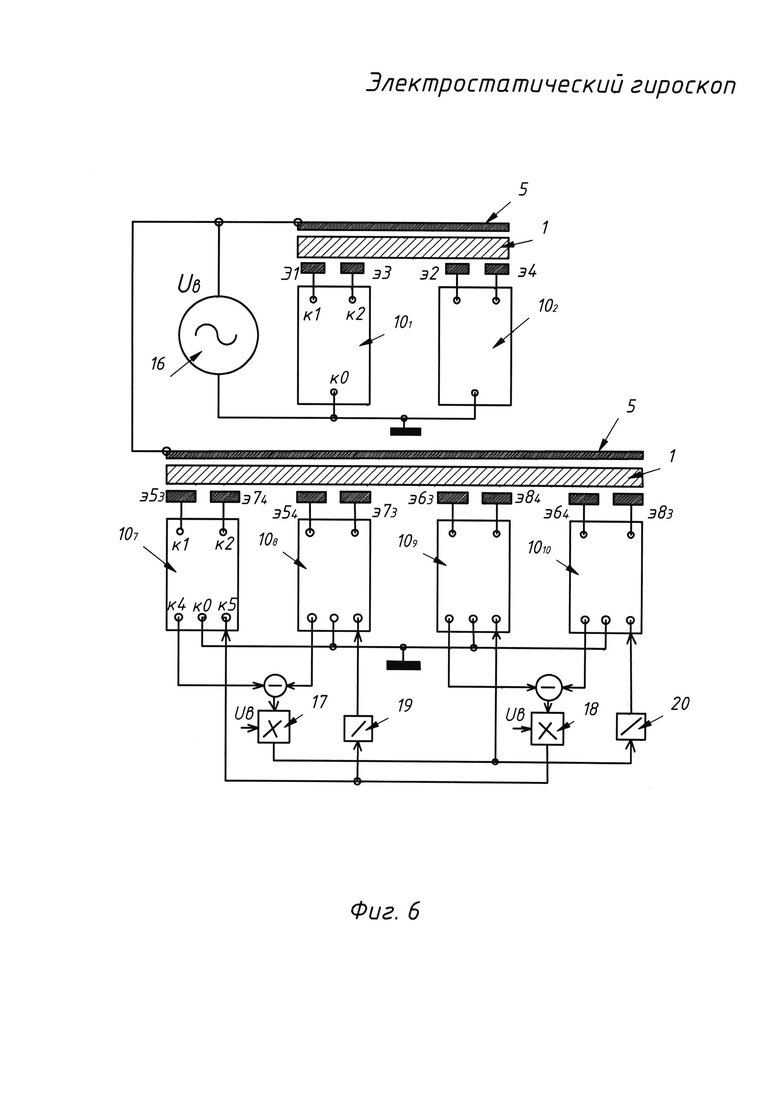
На фиг. 6 приведена блок-схема электроники гироскопа с угловой стабилизацией ротора относительно движущегося корпуса.
На фиг. 1-6 приняты следующие обозначения:
1 - ротор,
2 - основной центральный статор,
3, 4 - дополнительные статоры,
5 - обращенный статор привода вращения ротора,
6 - корпус,
7 - крышка,
8 - диэлектрический корпус основного статора с напыленными металлическими электродами Э (э1-э4),
9 - диэлектрический корпус дополнительного статора 3 с электродами э53-э83,
10 - одиночная ячейка схемы управления подвесом ротора,
11, 12 - датчики высокочастотных токов через электроды,
13 - демодулятор,
14, 15 - блоки управляющих напряжений,
16 - источник высокочастотного напряжения,
17, 18 - демодуляторы сигналов угловой стабилизации ротора,
19, 20 - инверторы сигналов управления стабилизацией ротора,
э54-э84 - электроды дополнительного статора 4, зеркальные электродам э53-э83 статора 3,
к0, к1-к5 - клеммы ячейки управления подвесом ротора.
Предложенный электростатический гироскоп содержит проводящий (выполненный, например, из бериллия) ротор в виде кольца 1 (фиг. 1), со сферической наружной поверхностью, основной центральный статор 2 (неконтактного подвеса ротора в электрическом поле) с поддерживающими электродами э1-э4 (фиг. 2) на цилиндрической рабочей поверхности, выполненными, например, способом напыления проводящего материала, дополнительные статоры 3 и 4 с электродами, выполненными либо на сферических рабочих поверхностях, концентричных сферической поверхности ротора, либо (с целью упрощения изготовления) на конических (угол конуса γ) поверхностях, касательных к сферической поверхности ротора с радиусом R (фиг. 3, электроды э5-э8). Привод вращения ротора выполнен в виде обращенного статора 5 с обмотками (их лобовые части показаны на чертеже) и внешней рабочей поверхностью, расположенной напротив внутренней цилиндрической поверхности ротора 1. Возможно также исполнение статора 5 с печатными обмотками на рабочей поверхности, которая может быть выполнена либо цилиндрической (при использовании схемы управления с угловой стабилизацией положения ротора), либо сферической, с учетом возможного максимального угла отклонения ротора при простом варианте применения гироскопа (без управления с помощью датчиков момента). В общем случае, поверхность статора 5 служит для ограничения поступательных и угловых смещений ротора при внешних возмущениях, превышающих заданные максимальные значения.
Кольцо ротора 1 (фиг. 1) может быть выполнено либо с шириной В, превышающей толщину А пакета из трех статоров, для реализации работы гироскопа в свободном режиме в ограниченном диапазоне углов отклонения корпуса гироскопа, определяемом величиной В-А (при этом положение вектора кинетического момента ротора определяется, например, благодаря динамическому дебалансу ротора - патент РФ №2065134), либо ширина кольца В удовлетворяет условию
А>В>С,
где С - толщина основного статора, для работы гироскопа в упрощенном варианте (дополнительные статоры использованы в качестве датчиков углового положения вращающегося ротора) или с использованием дополнительных статоров также в качестве датчиков момента для угловой стабилизации ротора (работа гироскопа как традиционного датчика угловой скорости объекта). Оптимальное значение ширины кольца во втором случае равно
В=(A+C)/2.
Блок-схема одиночной ячейки 10 (фиг. 4) электронной схемы управления подвесом ротора для двух диаметрально противоположно расположенных электродов Э содержит датчики 11 и 12 высокочастотных измерительных токов, величины которых пропорциональны зазорам между электродами и ротором, демодулятор 13 для преобразования высокочастотного дифференциального сигнала смещения ротора в сигнал на нулевой несущей для подачи на блоки 14 и 15 управляющих напряжений, прикладываемых к электродам для удержания ротора в центральном (подвешенном) положении. При этом выходные напряжения блоков 14 и 15 содержат постоянные опорные напряжения, задаваемые источником Uоп. К клеммам к1 и к2 подключаются электроды дополнительных статоров 3 и 4 в порядке, определяемом выбором простой схемы (фиг. 5) использования гироскопа или схемы (фиг. 6) со стабилизацией положения ротора. С клеммы к3 снимается сигнал, пропорциональный поступательному и угловому смещениям ротора, с клеммы 4 - сигнал суммы высокочастотных токов электродов, клемма к5 служит для подачи сигнала управления опорным напряжением для создания момента угловой стабилизации ротора.
Для реализации простого варианта использования гироскопа (без датчиков момента) применяется схема фиг. 5, где применены две ячейки подвеса 101 и 102 основного статора с электродами э1-э4 и четыре ячейки 103-106 для дополнительного статора 3 с электродами э53-э83 и дополнительного статора 4 с зеркально расположенными по отношению к статору 3 электродами э54-э84. Источник 16 высокочастотного напряжения Uв подключен к магнитопроводу статора вращения ротора 5, выполняющего дополнительно роль общего электрода для образования измерительных токов через электроды статоров подвеса.
Блок-схема электроники при использовании гироскопа в режиме угловой стабилизации вращающегося ротора отличается тем, что содержит (фиг. 6) четыре ячейки 107-1010, к каждой из которых подключены пары диагонально расположенных электродов дополнительных статоров 3 и 4 (например, к ячейке 107 подключены электроды э53 и э74), дополнительные демодуляторы 17 и 18 и инверторы 19 и 20 их выходных напряжений.
Предложенный гироскоп работает следующим образом. При включении электронных схем (фиг. 5 или фиг. 6) ротор взвешивается в электрическом поле статоров. При этом основной статор 2 (фиг. 1), благодаря цилиндрической рабочей поверхности электродов, обеспечивает не только устойчивый подвес ротора в плоскости XOY, но и в направлении оси Z. Дополнительные статоры 3 и 4 обеспечивают дополнительную жесткость подвеса по оси Z и служат для определения углового положения ротора и создания моментов управления движением ротора. Подключение обмоток статора 5 к многофазному (например, двухфазному) источнику напряжения приводит к взаимодействию вращающегося магнитного поля статора с внутренней проводящей поверхностью ротора 1, т.е. к его вращению по принципу асинхронного двигателя. При этом следует отметить, что переменное магнитное поле статора, создающее вихревые токи в теле ротора, помимо его вращения создает дополнительную отталкивающую силу (по принципу индукционного подвеса), увеличивающую жесткость подвеса в плоскости XOY. После достижения ротором номинальной скорости вращения эффект дополнительного индукционного центрирования может быть сохранен при фазовом способе управления двигателем, когда его скорость вращения является функцией сдвига фаз питающих напряжений при постоянстве их величины.
Поступательные и угловые смещения ротора, например, для электродов э53, э5ч, э73, э74 (фиг. 3) определяются следующими значениями высокочастотных токов: для электрода э53 -

где I0 - величина опорного тока,
Δх, Δz - относительные смещения ротора по осям X и Z,
Δβ - угловое смещение ротора относительно оси Y,
для электрода 
для электрода 
для электрода 
При этом выходные напряжения демодулятора 13 будут:
для схемы фиг. 5, ячейка 103-U13.5-103≈I53-I54=2I0(-Δz+Δβ),
ячейка 104-U13-5-104≈I73-I74=2I0(-Δz-Δβ),
т.е. содержит составляющие управления подвесом по оси Z и составляющие углового смещения ротора, создающие момент сопротивления повороту ротора. Разность напряжений с клемм к3 ячеек 103 и 104 будет: U13-5-103-U13-5-104=U(β)=4 I0 Δβ, т.е. пропорциональна угловому смещению ротора относительно оси Y. Аналогично получаем информацию об угле α поворота ротора относительно оси X от ячеек 105 и 106-U(α)=4I0Δα. Если корпус гироскопа поворачивать с угловой скоростью Ω, например, относительно оси X, то ее величина определяется углом отклонения ротора относительно оси Y, т.е. значением U(β) согласно формуле Ω=КуглΔβ/Н, где Кугл - угловая жесткость подвеса ротора, Н - кинетический момент ротора. В общем случае составляющие вектора угловой скорости поворота корпуса прибора одновременно оцениваются величинами U(α) и U(β).
Для схемы фиг. 6, пользуясь выражениями (1)-(4), для ячеек 107 и 108 на выходе демодулятора 13 (фиг. 4) получим
U13-6=2I0 (Δх+Δz), т.е. подвес ротора со стороны дополнительных статоров обладает как осевой, так и дополнительной радиальной жесткостями. На клемме к4 ячейки 107 имеем сигнал U4-6-107=2I0(1+Δβ), на клемме 4 ячейки 108 - сигнал U4-6-108=2I0(1-Δβ). В результате на выходе демодулятора 17 будет напряжение, пропорциональное угловому смещению ротора относительно оси Y, - U17=4I0Δβ. Аналогично на выходе демодулятора 18 - напряжение U18=4I0Δα, пропорциональное угловому смещению ротора относительно оси X. Поступая непосредственно и через инверторы 19 и 20 на клеммы 5 ячеек 107-1010, напряжения U17 и U18 изменяют величины опорных напряжений на электродах дополнительных статоров подвеса, благодаря чему создаются моменты, стабилизирующие угловое положение ротора относительно корпуса гироскопа. При этом данные напряжения являются мерами составляющих вектора угловой скорости поворота корпуса относительно осей X и Y.
Следует отметить, что предложенный гироскоп может дополнительно служить (как в прототипе) в качестве трехкомпонентного акселерометра при измерении поступательных смещений Δх, Δy, Δz (с использованием основного статора), вызванных составляющими вектора ускорения корпуса.
По сравнению с прототипом предложенный гироскоп обладает повышенной точностью благодаря сферической рабочей поверхности ротора, исключающей плечи моментов при силах подвеса, нормальных к поверхности. Увеличение (в несколько раз) перегрузки определяется малой массой кольца-ротора по сравнению с цилиндром-ротором прототипа. Это позволяет по данному параметру сравниться с микромеханическими гироскопами с упругим подвесом ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2015 |
|
RU2577553C1 |
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ВЕКТОРА КИНЕТИЧЕСКОГО МОМЕНТА НЕКОНТАКТНОГО ГИРОСКОПА | 1993 |
|
RU2065134C1 |
| УСТРОЙСТВО ПОДВЕСА ФЕРРОМАГНИТНОГО СФЕРИЧЕСКОГО РОТОРА | 1996 |
|
RU2156441C2 |
| СОВМЕЩЕННЫЙ ДАТЧИК МОМЕНТА И СМЕЩЕНИЯ ТЕЛА | 1998 |
|
RU2209393C2 |
| НЕКОНТАКТНЫЙ ПОДВЕС РОТОРА | 2013 |
|
RU2545310C2 |
| БЕСПОДШИПНИКОВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2562448C1 |
| ШПИНДЕЛЬ | 2008 |
|
RU2370344C1 |
| БЕСПОДШИПНИКОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2017 |
|
RU2652792C1 |
Изобретение относится к области приборостроения и может быть использовано в системах ориентации, навигации и управления различных подвижных объектов. Предложенный электростатический гироскоп содержит ротор, основной статор с поддерживающими электродами на цилиндрической рабочей поверхности, два дополнительных статора с электродами и привод вращения ротора, ротор выполнен в виде кольца со сферической наружной (внешней) поверхностью, дополнительные статоры, прилегающие к основному центральному статору, выполнены с электродами на сферических рабочих поверхностях или на конических поверхностях, касательных к сферической поверхности ротора, а привод вращения ротора выполнен в виде обращенного статора с обмотками и внешней рабочей поверхностью, расположенной напротив внутренней цилиндрической поверхности кольца ротора. Кольцо ротора может быть выполнено с шириной В, удовлетворяющей условию А>В>С, где А - толщина пакета из трех статоров, С - толщина основного статора. Технический результат, достигаемый заявленным изобретением, заключается в повышении точности и перегрузочной способности микромеханического электростатического гироскопа с непрерывно вращающимся ротором. 1 з.п. ф-лы, 6 ил.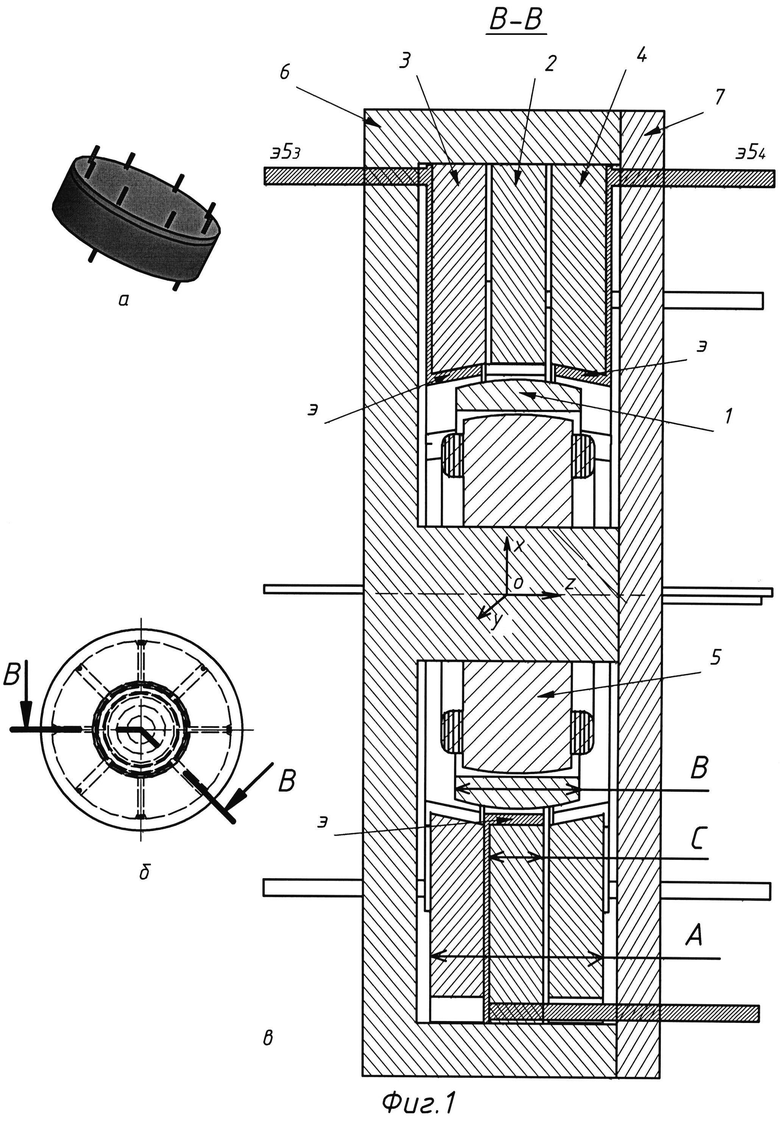
1. Электростатический гироскоп, содержащий ротор, основной статор с поддерживающими электродами на цилиндрической рабочей поверхности, два дополнительных статора с электродами и привод вращения ротора, отличающийся тем, что ротор выполнен в виде кольца со сферической наружной (внешней) поверхностью, дополнительные статоры, прилегающие к основному центральному статору, выполнены с электродами на сферических рабочих поверхностях или на конических поверхностях, касательных к сферической поверхности ротора, а привод вращения ротора выполнен в виде обращенного статора с обмотками и внешней рабочей поверхностью, расположенной напротив внутренней цилиндрической поверхности кольца ротора.
2. Электростатический гироскоп по п. 1, отличающийся тем, что кольцо ротора выполнено с шириной В, удовлетворяющей условию
А > В > С,
где А - толщина пакета из трех статоров, С - толщина основного статора.
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА С ЭЛЕКТРИЧЕСКИМ ПОДВЕСОМ РОТОРА | 1994 |
|
RU2116624C1 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2158903C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1999 |
|
RU2153649C1 |
| US 5719335 A1, 17.02.1998 | |||
| US 20070204706 A1, 22.12.1970 | |||
| Электрическое сопротивление для нагревательных приборов и нагревательный элемент для этих приборов | 1922 |
|
SU1997A1 |

