1
Изобретение относится к транспорт а именно к автономным транспортным средствам, содержащим многодвигател ньй частотно-управляемый тяговьш асинхронный электропривод .с индивидуальными преобразователями частоты и общим источником напряжения.
Цель изобретения - повышение точности управления, тяговым электроприводом при повороте транспортного средства.
На чертеже представлена схема устройства.
Входы формирователей 1 и 2 частоты скольжения, реализующих расчетную (для прямолинейного движения) зависимость частоты скольжения от частоты вращения соответствующего двигателя, соединены с датчиками 3 и А частоты вращения двигателей соответственно левого и правого бортов. Выходы формирователей частоты скольжения соединены с первыми входми сумматоров 5 и 6. Вторые входы сумматоров соединены с коммутатором 7, который переключает сигналы, поступающие с блоков 8 и 9 пе ремно- жения в зависимости от направления поворота. Управляет работой коммутатора блок 10 выделения знака, соединенный с датчиком 1I угла поворота колес. Знак сигнала с выхода этого датчика зависит от направления поворота. Первые входы блоков 8 и 9 перемножения подключены к датчику 1 угла поворота, второй.вход блока 8 соединен с функциональным преобразователем 12 наружного борта, а второй вход блока 9 - с функциональным преобразователем 13 внутреннего борта. Входы блоков 12 и 13 под;ключены к выходам задатчика 14 мощностиs датчика 15 линейной скорости, на входы которого подключены датчики частоты вращения двигателей левого и правого бортов, и датчика 11 угла поворота.
Устройство работает следующим образом.
В режиме прямолинейного движения сигнал от датчика угла поворота колес отсутствует, на выходах блоков 8 и 9 перемножения и коммутатора 7 сигнала также нет. На выходах формирователей 1 и 2 частоты скольжения имеется сигнал требуемой частоты, сформированный в функции частоты вр П1ения соответствующего двигателя.
5
10
15
20
25
45456 2
В режиме поворота транспортного средства сигнал от датчика 11 не равен нулю. Блок 10 выделения знака угла поворота определяет направление поворота и, в зависимости от того, какой борт транспортного средства становится наружным, а какой внутренним, подключает, на входы сумматоров 5 и 6 левого и правого бортов корректирующие сигналы с блоков 8 и 9 перемножения наружного и внутреннего бортов. Функциональные преобразователи 12 и 1-3 в зависимости от заданной, мощности Р, линейной скорости V и угла поворота ® вырабатывают сигналы, которые после перемножения с сигналом, пропорциональным углу поворота в блоках 8 и 9 через коммутатор поступают на входы сумматоров Таким образом осуществляется коррекция скольжений, а следовательно, и моментов, развиваемых тяговыми двигателями наружного И внутреннего бортов .
Так как установившееся состояние ТЯГОВОГО электропривода однозначно Определяется тремя независимыми переменными, в качестве которых, в силу простоты их измерения, целесообразно принять мощность Р, вводимую в .электропривод, линейную скорость V движения транспортного средства и угол поворота б управляемых колес, необходимым является формирование корректирующих воздействий в функции всех трех факторов. При этом соответствующим выбором зависимости корректирующих воздействий от Р, V и 0 принципи ально можно обеспечить необходимое перераспределение моментов мезвду двигателями разных бортов, а именно: увеличить момент двигателей внешнего борта, не уменьшая суммарный момент, и учесть ограничения на переменные электропривода (например на величину предкоммутационных токов инверторов) во всем диапазоне изменения режимных факторов Р, V и 0 . .
Зависимость сигнала коррекции от угла поворота для i-ro борта может быть в общем случае представлена в виде
u«i К.0, i 1,2, где в угол поворота управляемых
колес;
К - переменный коэффициент, зависящий от номера борта и режимных факторов.
30
35
40
45
50
55
3
Зависимость K.(Р, V,0) может быть определена в результате решени задачи оптимизации тягового электропривода при движении н а повороте с учетом ограничений. При этом данная зависимость с достаточной для практики точностью аппроксимируется полиномом второй степени вида
К,. К + К,Р + KgV + + + + KgV + + KgPV + KgP6i + К,о Ve. .
Использование универсальной аппроксимирующей функции позволяет в принципе одинаково реализовать функциональные преобразователи наружного и внутреннего бортов.
. Датчик линейной скорости представляет собой алгебраический сумматор сигналов, пропорциональных частотам вращения роторов двигателей нарзгжного и внутреннего бортов.
В ка:честве датчика угла поворота .может быть использован, например, датчик потенциометрического типа.
Редактор А,Сабо Заказ 3949/10
Составитель Л.Резникова Техред Н. Бонкало
Корректор
Тираж 647Подписное .
ВНИШ1И Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
5
О
0
5
неподвижная его часть жестко закреп- лена на раме транспортного средства, а подвижная часть имеет кинематическую связь с рулевой колонкой,
Задатчик мощности представляет собой, например, функциональный преобразователь, на вход которого поступает сигнал, пропорциональный частоте вращения первичного теплового двигателя. Блок выделения знака может быть выполнен, например, на операционном усилителе, один из входов которого соединен с общим проводом.
В связи с тем, что корректирующие воздействие на двигатель внутреннего борта как правило невелико, так как большие его значения ведут обычно к резкому возрастанию токов тяговых двигателей, практически достаточной оказывается коррекция с-кольжения только двигателей внешнего бор.та. При этом момент внутреннего борта уменьшается автоматически из-за связи двигателей бортов через общий источник напряжения при регулировании напряжения в функции суммарного тока нагрузки.
Корректор А.Обручар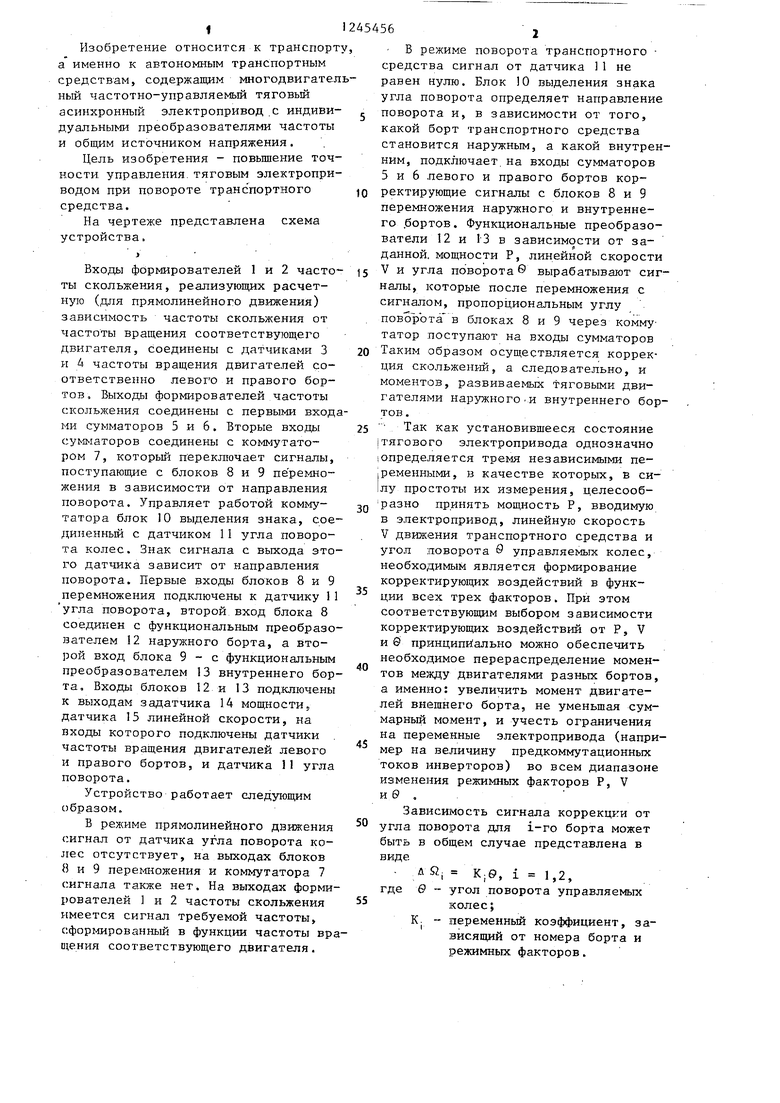

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1379932A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ МНОГОКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2483950C2 |
| СПОСОБ ОПТИМАЛЬНОГО РЕГУЛИРОВАНИЯ ТЯГОВОГО ЭЛЕКТРОПРИВОДА АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА С АСИНХРОННЫМИ ТЯГОВЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ | 2013 |
|
RU2547123C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2451389C1 |
| Устройство для управления асинхроннымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU838997A1 |
| Регулируемый электропривод постоянного тока с периодической нагрузкой | 1986 |
|
SU1417150A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2013231C1 |
| Тяговый электропривод автономного транспортного средства | 1989 |
|
SU1657419A1 |

| Устройство для регулирования последовательно соединенных тяговых двигателей ведущих колес транспортного средства | 1982 |
|
SU1123905A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
