Изобретение относится к преобразованию электрической энергии, а именно к управлению асинхронными тяговыми двигателями транспортного средства.
Известен способ управления асинхронным двигателем, заключающийся в том, что измеряют частоту вращения асинхронного двигателя, вводят в регулятор напряжения разность между заданной и текущей частотами вращения асинхронного двигателя, определяют частоту напряжения асинхронного двигателя суммированием частоты вращения ротора асинхронного двигателя и его оптимального скольжения, изменяют частоту и величину напряжения на асинхронном двигателе в соответствии с требуемыми значениями, при этом оптимальное скольжение и величину напряжения асинхронного двигателя вычисляют с учетом номинального электромагнитного момента, номинальной синхронной частоты вращения и номинальной частоты вращения асинхронного двигателя (RU, патент №2294050, кл. Н02Р 23/08 27/06, 2005 г.).
Недостатком известного способа управления является сложность и низкая точность вычисления текущего электромагнитного момента и напряжения асинхронного двигателя, т.к. реально измеряется только частота вращения асинхронного двигателя. Кроме этого, реализация только одного закона управления во всем диапазоне изменения скоростей движения транспортного средства приводит к недоиспользованию мощности асинхронных тяговых двигателей.
Известен способ управлением асинхронным двигателем, принятый за прототип, заключающийся в том, что измеряют частоту вращения асинхронного двигателя, вводят в регулятор напряжения разность между заданной и текущей частотами вращения асинхронного двигателя, измеряют ток асинхронного двигателя, по значению тока и по заранее вычисленной зависимости оптимального скольжения от тока определяют величину оптимального скольжения асинхронного двигателя, определяют частоту напряжения асинхронного двигателя суммированием частоты вращения ротора асинхронного двигателя и оптимального скольжения, изменяют частоту и напряжение преобразователя частоты, состоящего из последовательно соединенных выпрямителя и автономного инвертора напряжения, в соответствии с определенными их значениями в режиме ограничения по максимальным току и напряжению (В.А.Винокуров, Д.А.Попов «Электрические машины железнодорожного транспорта». Москва, «Транспорт», 1986, стр.376…385, 391…393).
Недостатком известного способа управления является невозможность его использования в режиме ослабления поля в условиях ограничения по мощности входного источника электроэнергии (например, дизель-генераторная установка тепловоза).
Техническим результатом изобретения является управление асинхронным тяговым двигателем в широком диапазоне частоты вращения в условиях ограничения по мощности входного источника электроэнергии транспортного средства.
Указанный технический результат достигается способом управления асинхронным тяговым двигателем, при котором измеряют частоту вращения асинхронного двигателя, измеряют ток асинхронного двигателя, по заранее вычисленной зависимости оптимального скольжения от тока определяют величину оптимального скольжения асинхронного двигателя, в режиме ограничения по максимальным току и напряжению изменяют частоту и выходное напряжение преобразователя частоты, состоящего из последовательно соединенных выпрямителя и автономного инвертора напряжения, отличающимся тем, что измеряют активную составляющую мощности преобразователя частоты, вводят в регулятор мощности разность между заданным и измеренным значениями мощности и формируют задание по фазному току, вводят в регулятор тока разность между заданным и измеренным значениями фазного тока и формируют амплитуду вектора напряжения, преобразуют вычисленное значение оптимального скольжения в угол оптимального скольжения, преобразуют частоту вращения асинхронного двигателя в угол поворота ротора, определяют угол поворота поля статора асинхронного двигателя суммированием угла оптимального скольжения и угла поворота ротора, по вычисленным значениям амплитуды вектора напряжения и угла поворота поля статора асинхронного двигателя по закону векторной ШИМ формируют сигналы управления автономным инвертором напряжения, который изменяет частоту и напряжение асинхронного двигателя, а в режиме ослабления поля асинхронного двигателя по разности между максимальным заданным и вычисленным значениями амплитуды вектора напряжения регулятор скольжения формирует добавочное скольжение, которое суммируют с оптимальным скольжением, интегрируют, суммируют с углом поворота ротора, получают новое значение угла поворота поля статора и формируют сигналы управления автономным инвертором напряжения, при которых возрастают скольжение и ток асинхронного двигателя и сохраняется режим постоянства мощности при ослаблении поля.
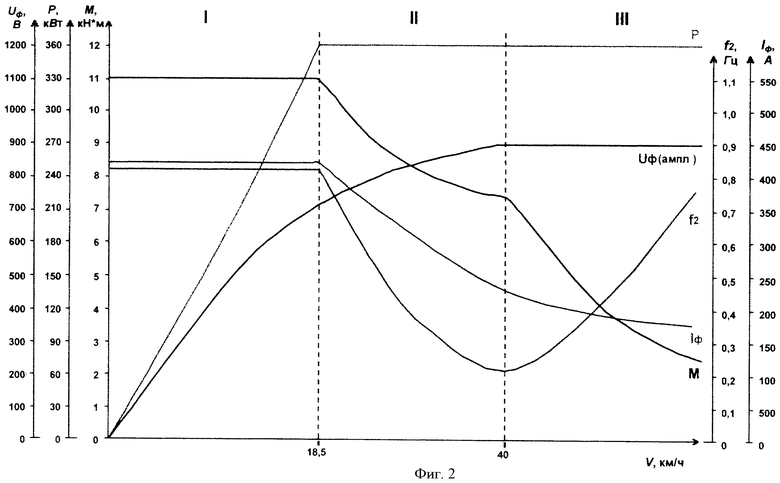
На фиг.1 представлена структурная схема устройства управления асинхронным тяговым двигателем, реализующая предложенный способ. На фиг.2 представлены графики изменения основных параметров электропривода от скорости транспортного средства с двигателем ДТА-350Т.
Устройство, реализующее способ управления асинхронным тяговым двигателем, содержит (фиг.1) датчик частоты вращения 1, который механически соединен с асинхронным тяговым двигателем 2, три датчика фазных токов 3, подключенных к блоку вычисления фазных токов 4, функциональный преобразователь 5, преобразователь частоты 6, входы которого подключены к источнику переменного напряжения ограниченной мощности (фазы А, В, С). Преобразователь частоты 6 состоит из последовательно соединенных выпрямителя 7 и автономного инвертора напряжения 8, выходы которого через три датчика фазных токов 3 подключены к входам асинхронного тягового двигателя 2, ограничитель максимального тока 9, ограничитель максимального напряжения 10. Кроме этого, само устройство содержит датчик напряжения 11 и датчик тока 12, входящие в состав преобразователя частоты 6 и подключенные к измерителю мощности 13, регулятор мощности 14, один из входов которого подключен к выходу блока сравнения по мощности 15, входы которого соответственно подключены к выходу измерителя мощности 13 и к выходу задатчика мощности 16. Другой вход регулятора мощности 14 подключен к выходу ограничителя максимального тока 9, а выход соединен с входом функционального преобразователя 5 и с одним из входов блока сравнения по току 17, другой вход которого соединен с выходом блока вычисления фазного тока 4, а выход подключен к одному из входов регулятора тока 18, к другому входу которого подключен ограничитель максимального напряжения 10, интегратор 19, выход которого подключен к одному из входов сумматора угла 20, другой вход которого соединен с выходом блока 21 вычисления частоты вращения и угла поворота ротора, подключенного к датчику частоты вращения 1, а выход сумматора угла 20 подключен к одному из входов блока 22 векторной широтно-импульсной модуляции (ШИМ), выходные сигналы которого управляют автономным инвертором напряжения 8, при этом другой вход блока 22 векторной ШИМ соединен с выходом регулятора тока 18 и с одним из входов блока 23 сравнения по напряжению, другой вход которого подключен к выходу блока 24 задания по максимальному напряжению, а выход подключен к входу регулятора скольжения 25, выход которого соединен с одним из входов сумматора скольжения 26, другой вход которого подключен к выходу функционального преобразователя 5, а выход соединен с входом интегратора 19.
Блок 22 векторной ШИМ необходим для формирования выходной частоты и напряжения автономного инвертора напряжения 8. Блоком 22 векторной ШИМ формируют выходное напряжение автономного инвертора напряжения 8 с использованием шести базовых векторов U1, U2, U3, U4, U5, U6 и одного нулевого вектора U(0). Путем переключения на периоде ШИМ между двумя соседними базовыми векторами и одним из нулевых векторов формируют требуемое выходное напряжение. Процесс формирования напряжения с использованием векторной ШИМ известен и подробно описан в технической литературе (например А.В.Клевцов «Преобразователи частоты для электропривода переменного тока», Тула «Гриф и К», 2008 г., стр.47-51).
Предлагаемый способ управления асинхронным тяговым двигателем реализован следующим образом.
Для конкретного типа асинхронного тягового двигателя, перед установкой на транспортное средство, определяют зависимость величины оптимального скольжения от величины фазного тока на стенде асинхронного электропривода. Применительно к тепловозной тяге для каждой позиции контроллера машиниста (не показан) известен фазный ток асинхронного двигателя 2, определяемый из условия его охлаждения. В стоповом режиме значение фазного тока, соответствующего определенной позиции контроллера машиниста, поддерживают регулятором тока 18. Изменяя величину скольжения в пределах 0,5-1,5 Гц, по датчику момента (не показан), установленному на валу асинхронного двигателя 2, определяют для каждого значения фазного тока максимальное значение момента и соответствующее ему скольжение. В предлагаемом способе управления зависимость оптимального скольжения от величины фазного тока реализует функциональный преобразователь 5.
При управлении асинхронным двигателем существуют три зоны регулирования (Фиг.2). В первой зоне (I) регулирование происходит с поддержанием максимального значения фазного тока (Iф) (по условиям охлаждения асинхронного двигателя на каждой позиции контроллера машиниста), что равнозначно поддержанию постоянного момента (М). Во второй зоне (II) поддерживают постоянную мощность (Р). В третьей зоне (III) при поддержании постоянной мощности (Р) напряжение на асинхронном двигателе (Uф (ампл.)) ограничивают на максимальном уровне для данной позиции контроллера машиниста, что соответствует режиму ослабления поля. Для магистрального тепловоза на 15 позиции контроллера машиниста переход из первой зоны (I) регулирования во вторую (II) и из второй зоны (II) регулирования в третью (III) осуществляется соответственно при скорости локомотива 18,5 км/час и 40 км/час.
Для управления в трех зонах регулирования измерителем мощности 13 измеряют активную составляющую мощности преобразователя частоты 6 перемножением сигналов с датчиков напряжения 11 и тока 12. Блоком сравнения по мощности 15 вычисляют разность между заданным значением мощности с задатчика мощности 16 и измеренным значением мощности. Вводят в регулятор мощности 14 разность между заданным и измеренным значениями мощности и формируют задание по фазному току. При этом задание по фазному току ограничено ограничителем максимального тока 9, который подключен к регулятору мощности 14. Блоком вычисления фазных токов 4 вычисляют значение тока асинхронного двигателя по сигналам с датчиков фазных токов 3. Блоком сравнения по току 17 вычисляют разность между заданным и измеренным значениями фазного тока. Вводят в регулятор тока 18 разность между заданным и измеренным значениями фазного тока и формируют амплитуду вектора напряжения (Um). Величина вектора напряжения (Um) ограничена ограничителем максимального напряжения 10 на уровне 0,867 в относительных единицах. При этом величина амплитуды фазного напряжения ограничена значением  (Ud - напряжение на выходе выпрямителя 7), что является необходимым условием для обеспечения синусоидальности фазных токов асинхронного двигателя 2 во всем диапазоне регулирования.
(Ud - напряжение на выходе выпрямителя 7), что является необходимым условием для обеспечения синусоидальности фазных токов асинхронного двигателя 2 во всем диапазоне регулирования.
Задание по фазному току с регулятора мощности 14 направляют также на вход функционального преобразователя 5, на выходе которого формируют оптимальное скольжение. До тех пор пока выходное фазное напряжение не достигнет своего максимального значения, регулятор скольжения 25 не работает и частота оптимального скольжения через сумматор скольжения 26 поступает на интегратор 19. Интегратором 19 преобразуют вычисленное значение оптимального скольжения в угол оптимального скольжения, который поступает на один из входов сумматора угла 20. Блоком 21 вычисления частоты вращения и угла поворота ротора преобразуют частоту вращения асинхронного двигателя 2, измеренную датчиком частоты вращения 1, в угол поворота ротора, который поступает на другой вход сумматора угла 20. Сумматором угла 20 определяют угол поворота поля статора (θ) асинхронного двигателя 2 суммированием угла оптимального скольжения и угла поворота ротора. По вычисленным значениям амплитуды вектора напряжения (Um) и угла поворота поля статора (θ) асинхронного двигателя 2, по закону векторной ШИМ блоком 22 векторной ШИМ формируют сигналы управления автономным инвертором напряжения 8, который изменяет частоту и напряжение асинхронного двигателя 2.
При ослаблении поля для поддержания постоянства мощности амплитуду вектора напряжения (Um) в блоке 23 сравнения по напряжению сравнивают с напряжением с блока 24 задания по максимальному напряжению, значение которого составляет 0,85 в относительных единицах. По разности между максимальным заданным и вычисленным значениями амплитуды вектора напряжения (Um), регулятором скольжения 25 формируют добавочное скольжение, которое суммируют с оптимальным скольжением в сумматоре скольжения 26, интегрируют интегратором 19, суммируют с углом поворота ротора в сумматоре угла 20 и получают новое значение угла поворота поля статора (θ). Блоком 22 векторной ШИМ формируют сигналы управления автономным инвертором напряжения 8, при которых возрастают скольжение и ток асинхронного двигателя и сохраняется режим постоянства мощности при ослаблении поля.
Таким образом изменение амплитуды вектора выходного напряжения (Um) в пределах 0,85-0,867 в зоне ослабления поля позволяет поддерживать мощность на постоянном уровне, что расширяет частотный диапазон регулирования асинхронным двигателем 2 в условиях тепловозной тяги.
Предлагаемый способ управления асинхронным двигателем может быть использован в системах управления тяговыми преобразователями локомотивов с передачей переменного тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2582202C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2528612C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2390091C1 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2398349C1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
Изобретение относится к области электротехники и может быть использовано в системах управления тяговыми преобразователями локомотивов с передачей переменного тока. Техническим результатом является управление асинхронным тяговым двигателем в широком диапазоне частоты вращения в условиях ограничения по мощности входного источника электроэнергии транспортного средства. В способе управления асинхронным тяговым двигателем по разности между заданным и измеренным значениями активной мощности, по вычисленным в соответствии с формулой изобретения углу оптимального скольжения и углу поворота ротора определяют угол поворота поля статора асинхронного двигателя, суммируя угол оптимального скольжения и угол поворота ротора, по вычисленным значениям амплитуды вектора напряжения и угла поворота поля статора асинхронного двигателя по закону векторной ШИМ формируют сигналы управления автономным инвертором напряжения, а в режиме ослабления поля асинхронного двигателя по разности между максимальным заданным и вычисленным значениями амплитуды вектора напряжения формируют добавочное скольжение, с учетом которого получают новое значение угла поворота поля статора, и формируют сигналы управления автономным инвертором напряжения, при которых возрастают скольжение и ток асинхронного двигателя, и сохраняется режим постоянства мощности при ослаблении поля. 2 ил.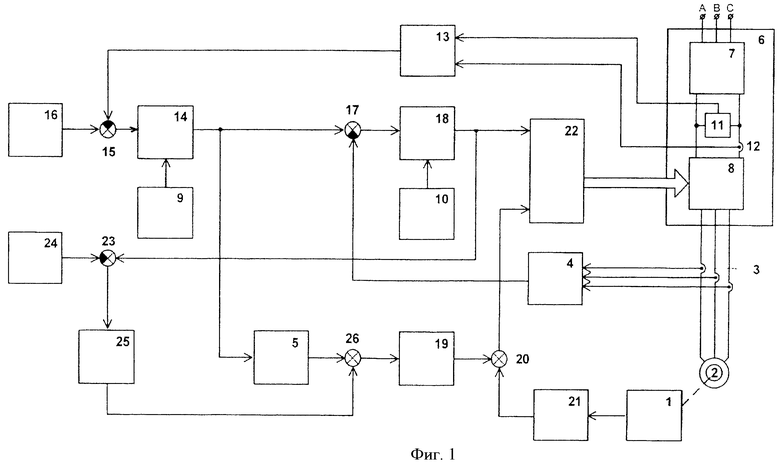
Способ управления асинхронным тяговым двигателем, заключающийся в том, что измеряют частоту вращения асинхронного двигателя, измеряют ток асинхронного двигателя, по заранее вычисленной зависимости оптимального скольжения от тока определяют величину оптимального скольжения асинхронного двигателя, в режиме ограничения по максимальным току и напряжению изменяют частоту и выходное напряжение преобразователя частоты, состоящего из последовательно соединенных выпрямителя и автономного инвертора напряжения, отличающийся тем, что измеряют активную составляющую мощности преобразователя частоты, вводят в регулятор мощности разность между заданным и измеренным значениями мощности и формируют задание по фазному току, вводят в регулятор тока разность между заданным и измеренным значениями фазного тока и формируют амплитуду вектора напряжения, преобразуют вычисленное значение оптимального скольжения в угол оптимального скольжения, преобразуют частоту вращения асинхронного двигателя в угол поворота ротора, определяют угол поворота поля статора асинхронного двигателя суммированием угла оптимального скольжения и угла поворота ротора, по вычисленным значениям амплитуды вектора напряжения и угла поворота поля статора асинхронного двигателя по закону векторной ШИМ формируют сигналы управления автономным инвертором напряжения, который изменяет частоту и напряжение асинхронного двигателя, а в режиме ослабления поля асинхронного двигателя по разности между максимальным заданным и вычисленным значениями амплитуды вектора напряжения регулятор скольжения формирует добавочное скольжение, которое суммируют с оптимальным скольжением, интегрируют, суммируют с углом поворота ротора, получают новое значение угла поворота поля статора и формируют сигналы управления автономным инвертором напряжения, при которых возрастают скольжение и ток асинхронного двигателя и сохраняется режим постоянства мощности при ослаблении поля.
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2294050C2 |
| УСТРОЙСТВО И СПОСОБ РЕГУЛИРОВАНИЯ СИСТЕМЫ ПРИВОДА ОТ ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2391767C2 |
| СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2390091C1 |
| КОМПОЗИЦИЯ ДЛЯ ЗАЩИТЫ ОТ КОРРОЗИИ | 2000 |
|
RU2188802C2 |
| JP 5091602 A, 09.04.1993 | |||
| US 2010087971 A1, 08.04.2010 | |||
| Устройство для окончательной обработ-Ки ОТВЕРСТий | 1977 |
|
SU831577A1 |
| WO 2008107992 A1, 12.09.2008. | |||

