f 1
Изобретение относится к техничесим средствам обучения и может быть спользовано для обучения водителей ранспортных средств, например автоусов.
Цель изобретения - повышение эфективности обучения.
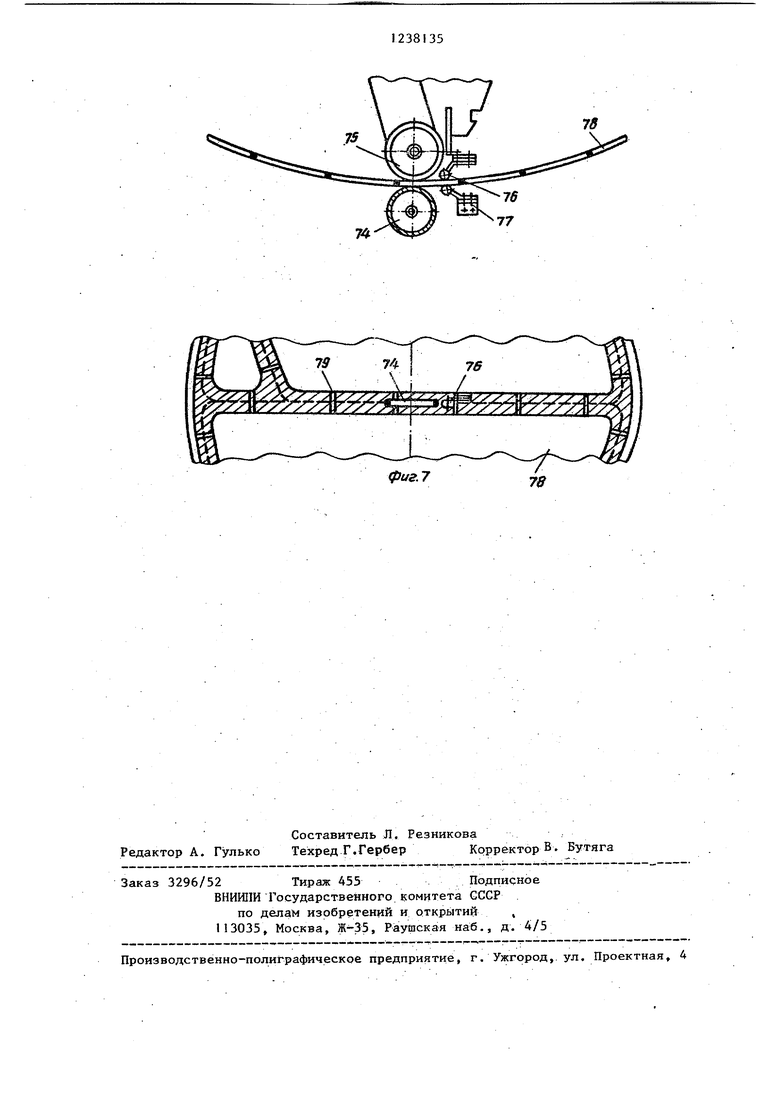
На фиг. 1 представлена блок-схема редлагаемого тренажера; на фиг. 2 - ыполнение органов управления; на иг. 3 - конструктивное выполнение митатора растормаживания рулевого колеса; на фиг. 4 - конструкция имитатора нагрузки рулевого колеса и увода колес; на фиг. 5 конструкция имитатора возврата рулевого колеса в нейтральное положение и имитатора отказа рулевого управления; на фиг. 6 - блок-схема имитатора гидромеханической передачи и акустической обстановки; на фиг. 7 - выполнение теневого проектора.
Тренажер содержит рабочее место 1 обучаемого с органами 2 управления, в состав которых входят рулевое колесо 3, рычаг 4 управления гидромеханической коробкой передач, педаль 5 акселератора, педаль 6 ножного тормоза и рычаг ручного (стояночного) тормоза (не указан). Органы 2 управления связаны с датчиками 7 их поло- жения. Имитатор 8 контрольно-измерительных приборов содержит имитатор спидометра 9-, другие контрольно-измерительные приборы 10, например амперметр, указатель уровня топлива, указатель поворота, и т.д.
Выходы датчиков 7 положения связаны с входами блока 11 анализа управляющих действий обучаемого и моделирующего блока 12, который моделирует работу двигателя. Выход моделирующего блока 12 связан с входом имитатора 13 гидромеханической передачи, . выход которого связан с имитатором 14 акустической обстановки, Блок нагрузки 15 включает имитатор 16 растормаживания рулевого Колеса, имитатор 17 возврата рулевого колеса в среднее положение, имитатор 18 увода рулевого колеса, имитатор 19 рулевого управления. Устройство содержит также имитатор 20 отказа тормозной системы, который обеспечивает провал педали ножного тормоза. Тренажер содержит имитатор 21 дорожной обстановки, который включает свето- сигнализатор 22, экран 23, кинопроек тор 24, теневой проектор 25 с приво238
к 38135 2
дом перемещения 26 и датчиком 27 траектории движения.
Рабочее место 28 обучающего содержит задатчик 29 программы, блок 30 J контроля траектории, блок 31 задания, критических ситуаций, блок 32 оценки, пульт 33 управления и блок 34 питания .
Педаль 6 ножного тормоза установ- 0 лена на оси 35 (фиг. 2) и снабжена штоком 36, связанным с электромагнитом 37 с сердечником кронштейном 39, датчиком 40 с кронштейном 41 и пружиной 42. На штоке 36 укреплен резино- 5 вый упор 43.
Имитатор 16 растормаживания рулевого колеса (фиг. 3) содержит электромагнит 44 с сердечником, тормозной барабан 45, установленный на рулевом 2Q валу 46. На тормозном барабане 45 укреплена тормозная колодка 47 с тормозной лентой 48. На кронштейне 49 установлен датчик 50 с пластиной 51 его включения. Электромагнит 44 ук 25 реплен жестко посредством уголка 52.
Имитатор изменения нагрузки на рулевом колесе и увода колес содержит шкив 54 рулевого вала 46, связанный посредством клиновидного ремня 55 и , натяжного ролика 56 со шкивом 57 электродвигателя 58. Натяжной ролик 56 соединен с датчиком 59 усилия через подпружиненный сердечник 60, Пружина сердечника упирается в кронштейн 61. Для стабилизации в системе использована обратная связь от датчика 59 усилия. В случае имитации увода на обе обмотки электродвигателя 58 с блока 31. задания критических ситуаций подается напряжение, вызываю-, щее его вращение, передаваемое на рулевое колесо.
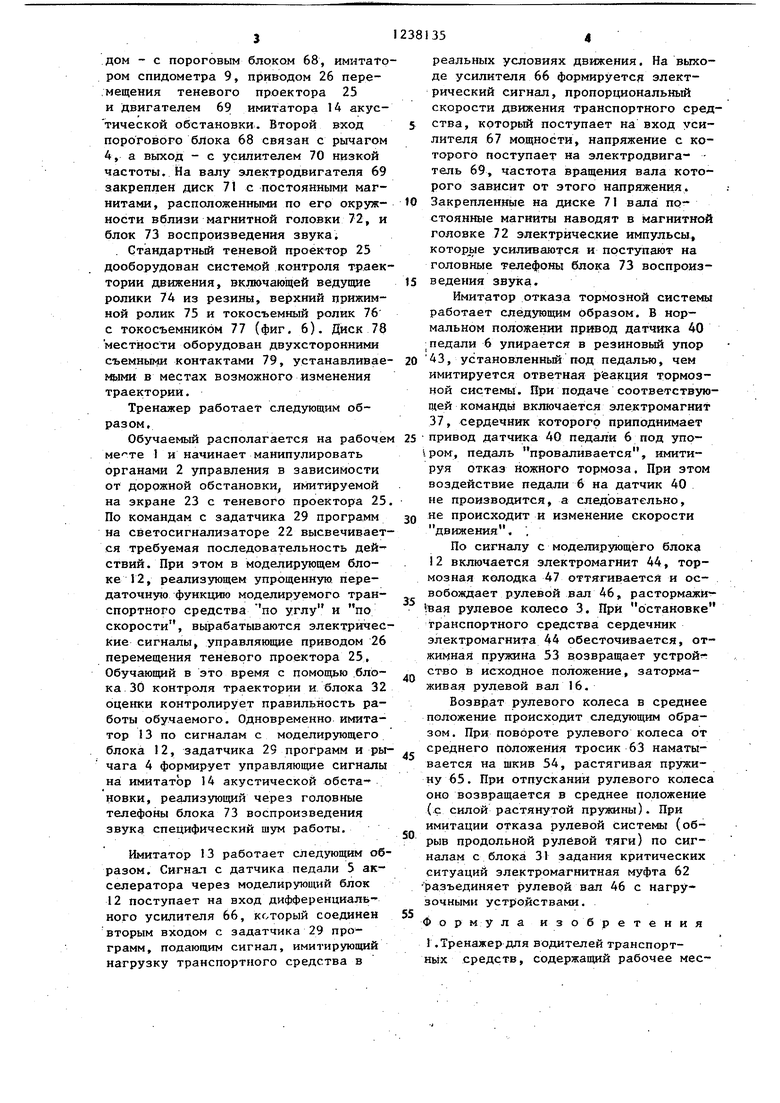
Имитатор возврата руля в среднее положение и обрыва рулевой тяги (фиг. 5) содержит на рулевом валу 46 5 электромагнитную муфту 62, на шкиву 54 рулевого вала 46 укреплен тросик 63, связанный через ролик 64 с пружиной 65.
Имитатор гидромеханической переда- 50 чи и акустической обстановки (фиг. 6) состоит из дифференциального усилителя 66, входы которого соединены с выходами моделирующего блока 12 и задатчиком 29 программ, а выход - с 55 усилителем 67 мощности, вторым, входом соединенным с датчиком пружины рычага 4 пульта (датчик входит в состав блока датчиков 7), а выхо35
40
дом - с пороговым блоком 68, имитато ром спидометра 9, приводом 26 перемещения теневого проектора 25 и двигателем 69 имитатора 14 акус- тической обстановки. Второй вход порогового блока 68 связан с рычагом 4, а выход - с усилителем 70 низкой частоты. На валу электродвигателя 69 закреплен диск 71 с постоянными магнитами, расположенными по его окружности вблизи магнитной головки 72, и блок 73 воспроизведения звука,
. Стандартньй теневой проектор 25 дооборудован системой контроля траектории движения, включающей ведущие ролики 74 из резины, верхний прижимной ролик 75 и токосъемный ролик 76 с токосъемником 77 (фиг, 6). Диск 78 местности оборудован двухсторонними съемными контактами 79, устанавливае- мьти. в местах возможного изменения траектории.
Тренажер работает следующим образом,
Обучаемьш располагается на рабочем 1 и начинает манипулировать органами 2 управления в зависимости от дорожной обстановки имитируемой на экране 23 с теневого проектора 25, По командам с задатчика 29 программ на светосигнализаторе 22 высвечивается требуемая последовательность действий. При этом в моделирующем блоке 12, реализующем упрощенную передаточную функцию моделируемого транспортного средства по углу и по скорости, вырабатываются электрические сигналы, управляющие приводом 26 перемещения теневого проектора 25. Обучающий в это время с помощью .блока .30 контроля траектории и блока 32 оцетси контролирует правильность работы обучаемого. Одновременно имитатор 13 по сигналам с моделирующего блока 12, задатчика 29 программ и рычага 4 формирует управляющие сигналы на имитатор 14 акустической обета- новки, реализующий через головные телефоны блока 73 воспроизведения звука специфический шум работы.
Имитатор 13 работает следующим образом. Сигнал с датчика педали 5 акселератора через моделирующий блок 12 поступает на вход дифференциального усилителя 66, который соединен вторым входом с задатчика 29 про грамм, подающим сигнал, имитирующий нагрузку транспортного средства в
реальных условиях движения. На выходе усилителя 66 формируется электрический сигнал, пропорциональный скорости движения транспортного сред5 ства, которьй поступает на вход усилителя 67 мощности, напряжение с которого поступает на электродвига- - тель 69, частота вращения вала которого зависит от этого напряжения,
0 Закрепленные на диске 71 вала постоянные магниты наводят в магнитной головке 72 электрические импульсы, котор ые усиливаются и поступают на головные телефоны блока 73 воспроиз5 ведения звука.
Имитатор отказа тормозной системы работает следующим образом, В нормальном положении ПРИВОД датчика 40 j педали 6 упирается в резиновый упор
0 43, установленный под педалью, чем имитируется ответная реакция тормозной системы. При подаче соответствующей команды включается электромагнит 37, сердечник которого приподнимает
5 привод датчика 40 педали 6 под упо- ipoM, педаль проваливается, имитируя отказ ножного тормоза, При этом воздействие педали 6 на датчик 40 не производится, а следовательно,
Q не происходит и изменение скорости движения. .
По сигналу с моделирующего блока 2 включается электромагнит 44, тормозная колодка 47 оттягивается и освобождает рулевой вал 46, растормажй ,вая рулевое колесо 3, При остановке транспортного средства сердечник электромагнита 44 обесточивается, отжимная пружина 53 возвращает устрой ство в исходное положение, затормаживая рулевой вал 16,
Возврат рулевого колеса в среднее положение происходит следующим образом. При повороте рулевого колеса от среднего положения тросик 63 наматывается на шкив 54, растягивая пружину 65 , При отпусканий рулевого колеса оно возвращается в среднее положение (с силой растянутой пружины). При имитации отказа рулевой системы (обрыв продольной рулевой тяги) по сигналам с блока 31 задания критических ситуаций электромагнитная муфта 62 разъединяет рулевой вал 46 с нагрузочными устройствами.
Формула изобретения
1 .Тренажер для водителей транспортных средств, содержащий рабочее мес5
то обучаемого с органами управления, связанными с блоком нагрузки и датчиками их положения, выходы которых подключены к входам моделирующего блока, задатчик программ, блок оценки , имитатор контрольно-измерительных приборов и имитатор дорожной обстановки, включающий экран, свето- сигнализатор, кинопроектор, связан- ный с выходом задатчика программ, и теневой проектор с приводом его перемещения, связанным с одним из выходов моделирующего блока, и имитатор акустической обстановки, о т л и - чающийся тем, что, с целью повьшения эффективности обучения, он снабжен датчиком траектории движения , соединенным с его выходом блоком контроля траектории, имитатором гид- ромеханической передачи, анализатором управляющих действий обучаемого, блоком задания критических ситуаций, имитатором отказа тормозной системы, а блок нагрузки вьшолнен на имитато- ре отказа рулевого колеса и соединенных с его тремя входами имитаторах растор- мэйсивания рулевого колеса, возврата рулевого колеса в среднее положение и увода рулевого колеса, четвертый вход имитатора отказа рулевого колеса соединен с одним из выходов блока задания критических ситуаций, другие выходы которого подключены соответственно к входам имитатора контрольно- измерительных приборов, к входу имитатора увода рулевого колеса и входу имитатора отказа тормозной системы, связанного выходом с органами управления , при этом.входы анализатора управляющих действий обучаемого соединены соответственно с выходом датчика положения органов управления, первым выходом задатчика программ и вторым выходом моделирующего блока, третий выход которого подключен к входам имитатора растормаживания и увода рулевого колеса, а четвертый - к первому входу имитатора гидромеханической передачи, один выход которо го подключен к имитатору акустическо
обстановки, а другие выходы соответственно к имитатору контрольно-измерительных приборов и к приводу теневого проектора, а второй и третий входы соответственно к выходам датчиков положения органов управления и второму выходу задатчика программ, третий и четвертый выходы которого свазаны соответственно с светосигна- лизатором и кинопроектором, а выход датчика траектории движения соединен с одним из входов блока контроля траектории, другой вход которого связан с кинопроектором, а выход подключен
к другому входу блока оценки. I
2.Тренажер по п. I , о т л и - чающийся тем, что имитатор акустической обстановки содержит электродвигатель с закрепленными на его валу диском, выполненным из изоляционного материала, по окружности которого размещены постоянные магниты, взаимодействзгЮщие с магнитной головкой, связанной через усилитель низкой частоты с блоком воспроизведения звука.
3.Тренажер по п. I, отличающийся, тем, что имитатор растормаживаиия рулевого колеса содержит установленный на рулевом валу барабан с тормозной колодкой и электромагнитным приводом, связанным с входом блока растормаживания.
4.Тренажер по п. 1, о т л и - чающийся тем, что имитатор увода рулевого колеса содержит на своем входе электродвигатель, соединенный механической передачей со шкивом рулевого кодеса, и натяжной ролик, механически связанный с электродатчиком усилий.
5.Тренажер по п. 1, отличающийся тем, что имитатор отказа рулевого управления содержит электромагнитную муфту, установленную между полуосями вала рулевого колеса, при этом подвижная полумуфта механически связана с электромагнитным приводом.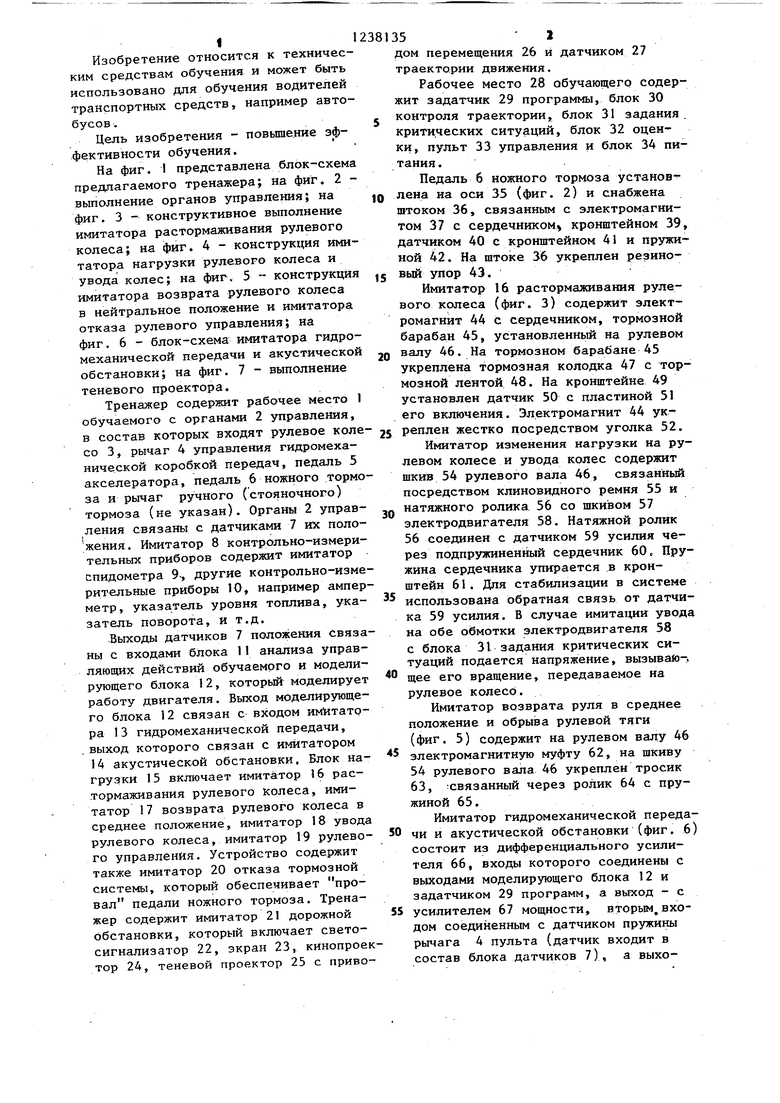
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| Способ обучения приемам управления четырехколесным внедорожным мототранспортным средством (квадроциклом) и тренажер для его реализации | 2024 |
|
RU2830015C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| СПОСОБ ОБУЧЕНИЯ ВОЖДЕНИЮ БОЕВОГО ТРАНСПОРТНОГО СРЕДСТВА И ТРЕНАЖЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2709344C1 |
| Тренажер для водителей транспортных средств | 1988 |
|
SU1626260A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| Стенд для испытания противоблокировочной системы транспортного средства | 1984 |
|
SU1245472A1 |
| Тренажер водителя транспортного средства | 1980 |
|
SU934530A1 |
| Устройство для обучения трактористов | 1977 |
|
SU678501A1 |
Изобретение относится к устройствам для обучения водителей транспортных средств. Цель изобретения - повышение эффективности обучения. Рабочее место обучаемого снабжено органами управления, которые связаны с датчиками 7 ик положения. По сигналу с моделирующего блока 12 включается электромагнит, тормозная колодка оттягивается и освобождает рулевой вал, растормаживая рулевое колесо. При остановке транспортного средства сердечник электромагнита обесточивается. Отжимная пружина возвращает устройство в исходное положение, затормаживая рулевой вал 1.6. 4 з.п. ф-лы, 7 ил. I сл tsS 00 00 00 Р1
,
ЧИ« 1 «. 1 1 1 ч 1 f . 1 1 U Ч 1
cftue.S
«
6S
S7
..J
4
69
u
«Mv7/
tpuf.S
фиг. 7
Составитель Л. Резникова Редактор А. Гулько Техред Г.Гербер Корректор В.Бу/гяга
Заказ 3296/52 Тираж 453Подписное
ВНИШШ Государственноро комитета GCGP
по делам изобретений и открытий , 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-поли
графическое предприятие, г. Ужгород,, ул. Проектная, 4
| Автомобильный транспорт | |||
| М., 1979, № 3, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
