Изобретение относится к автоматике и может быть использовано для контроля параметров подвижных объектов в автоматизированных системах управления подвижными объектами.
Цель изобретения - повышение надежности устройства.
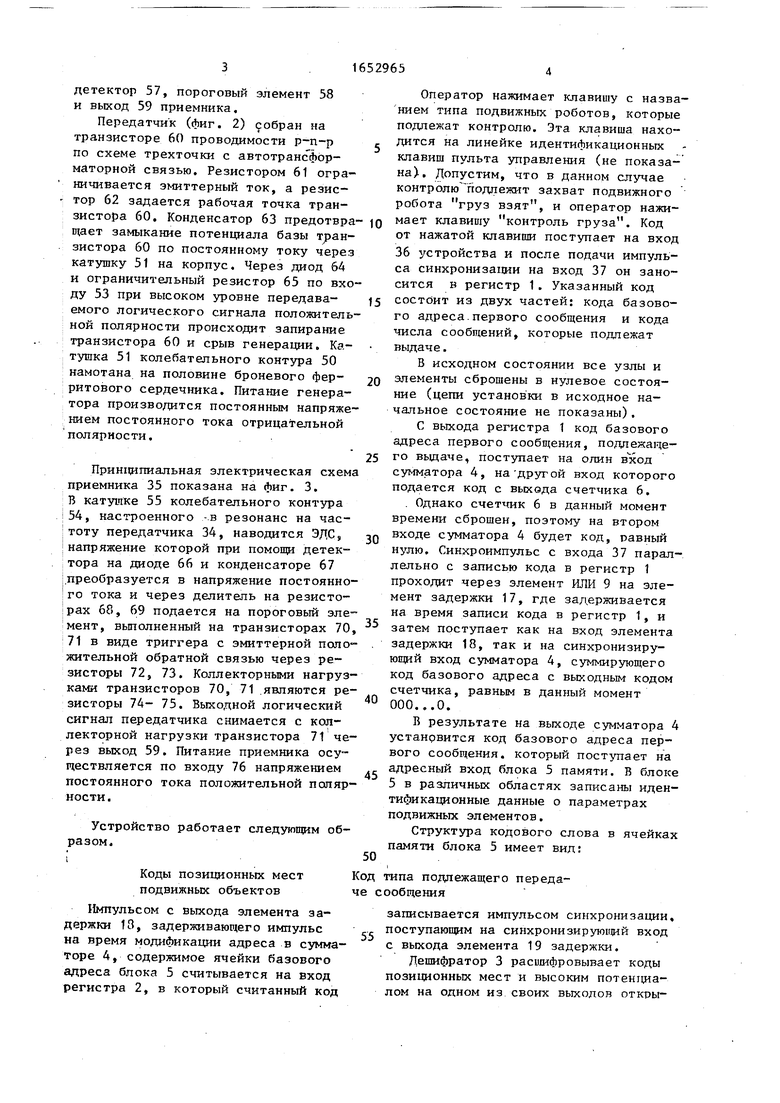
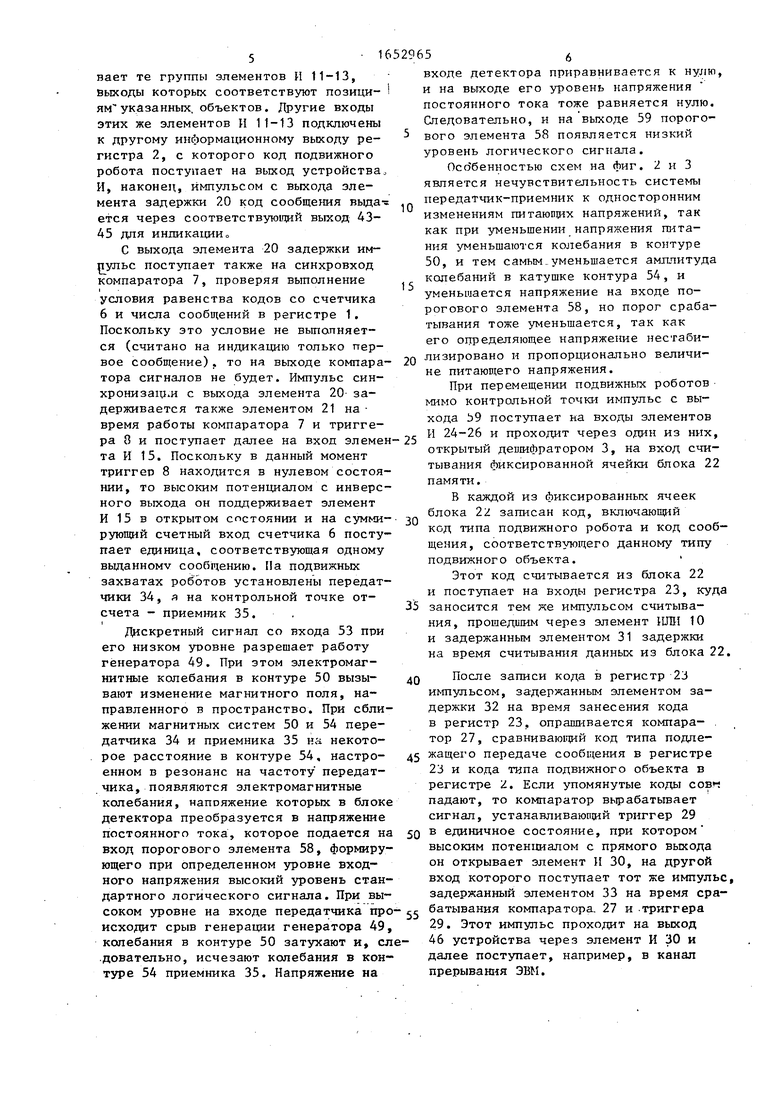
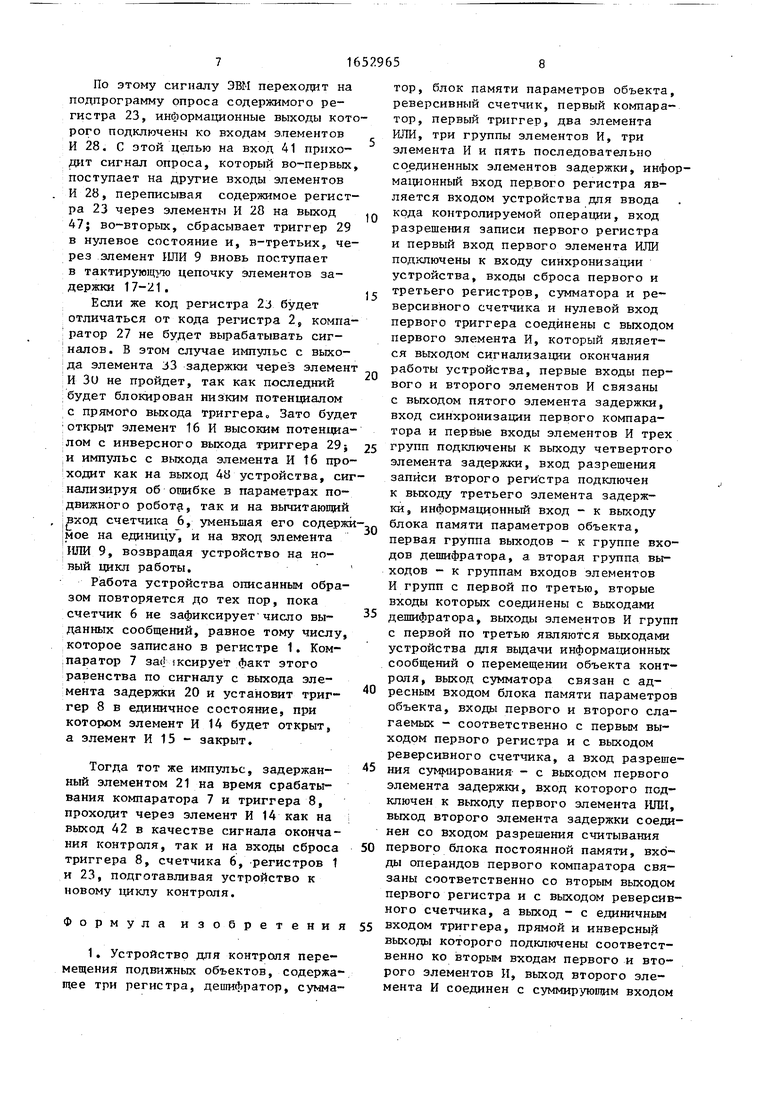
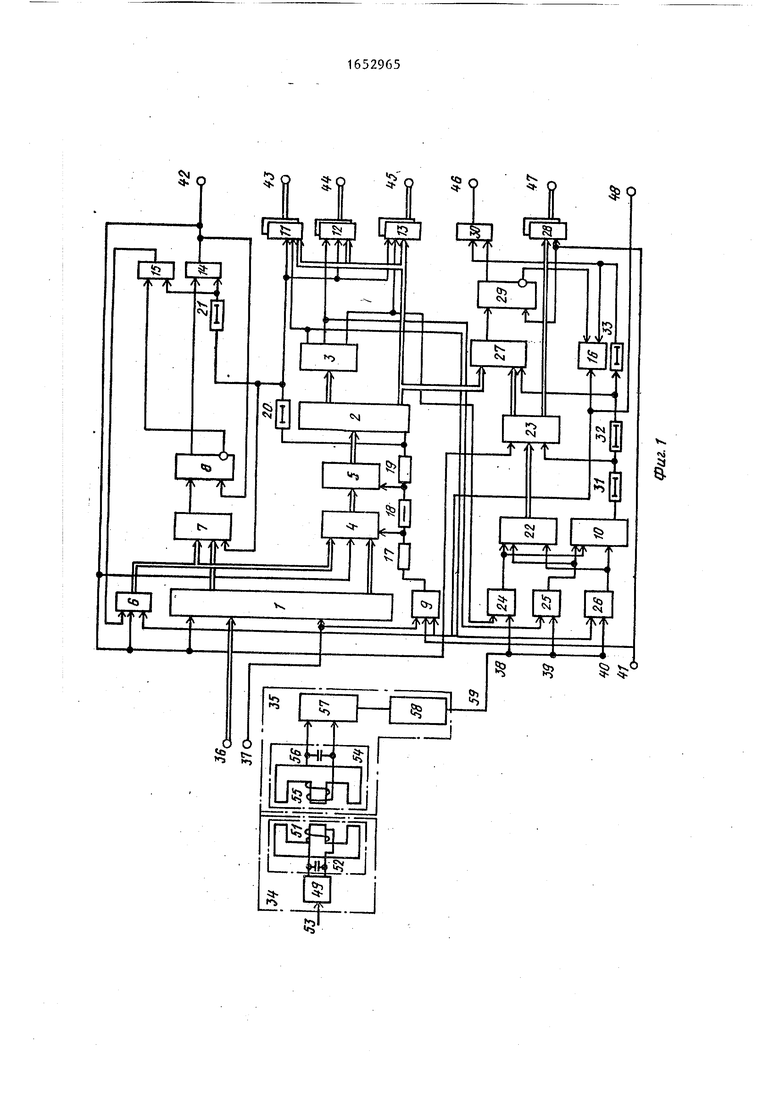
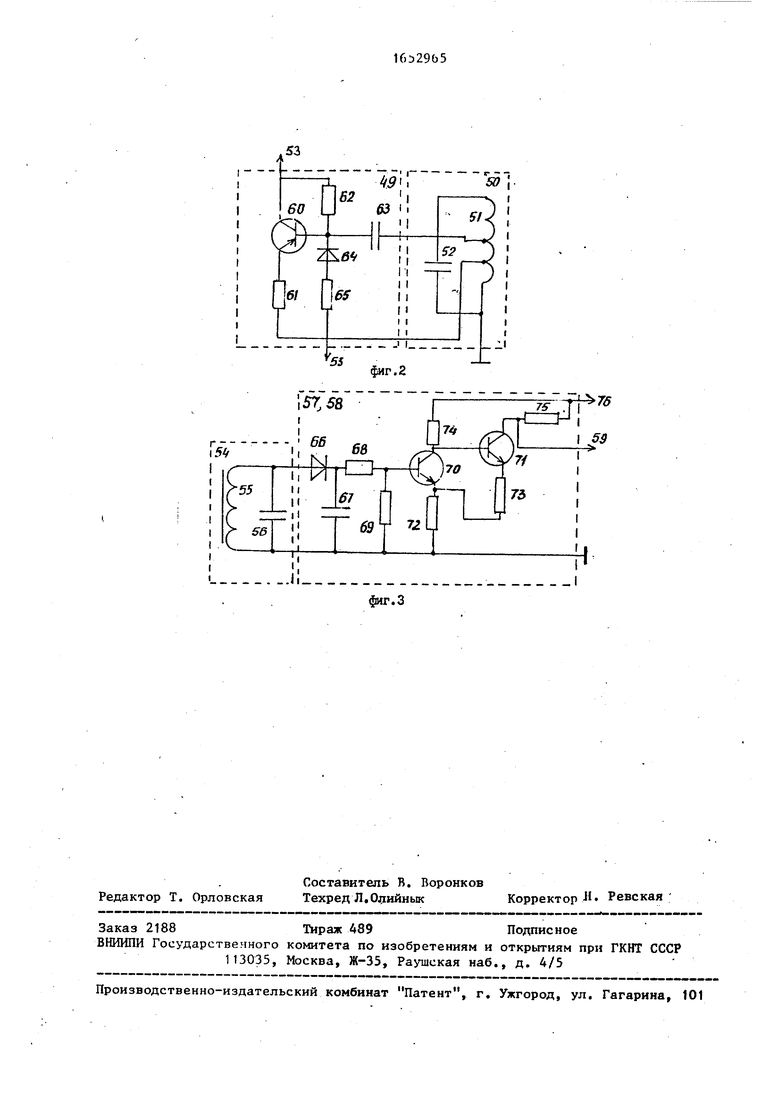
На фиг, 1 представлена схема устройства; на фиг. 2 и 3 - схемы соответственно передатчика и приемника сигналов о положении объекта контроля.
Устройство содержит первый 1 и второй 2 регистры, дешифратор 3, сумматор 4, блок 5 параметров объекта (первый блок постоянной памяти), реверсивный счетчик 6, первый компаратор 7, первый триггер 8, первый 9 и второй 10 элементы ИЛИ, лервум-третью группы элементов И 11, 12, 13, первый 14, второй 15, третий 16 элементы И, первый 17, второй 18, третий 19, четвертый 20, пятый 21 элементы задержки, блок 22 памяти кодов сообщений (второй блок постоянной памяти), второй регистр 23, четвертый 24, пятый 25 и шестой 26 элементы И, второй компаратор 27, четвертую группу 28 элементов И, второй триггер 29, седьмой элемент И 30, шестой 31, седьмой 32, восьмой 33 элементы задержки, передатчик 34 и приемник 35 сигналов о положении объекта контроля, входы &6-41 и выходы 42-48 устройства, а также входящие в состав передатчика 34 и приемника 35 высокочастотный генератор 49, колебательный контур 50, сердечник броневого типа с катушкой 51 и емкостный элемент (конденсатор) 52, вход 53 передатчика, колебательный контур 54, сердечник броневого типа с катушкой 55, емкостный элемент (конденсатор) 56,
О5
сл to
СО О
сл
детектор 57, пороговый элемент 58 и выход 59 приемника.
Передатчик (фиг. 2) 9°бран на транзисторе 60 проводимости р-п-р по схеме трехточки с автотрансформаторной связью. Резистором 61 ограничивается эмиттерный ток, а резистор 62 задается рабочая точка транзистора 60. Конденсатор 63 предотвра щает замыкание потенциала базы транзистора 60 по постоянному току через катушку 51 на корпус. Через диод 64 и ограничительный резистор 65 по входу 53 при высоком уровне передава- емого логического сигнала положительной полярности происходит запирание транзистора 60 и срыв генерации. Ка- тушка 51 колебательного контура 50 намотана на половине броневого фер- ритового сердечника. Питание генератора производится постоянным напряжением постоянного тока отрицательной полярности.
Принципиальная электрическая схема приемника 35 показана на фиг. 3. В катупке 55 колебательного контура 54, настроенного -в резонанс на частоту передатчика 34, наводится ЭДС, напряжение которой при помощи детектора на диоде 66 и конденсаторе 67 преобразуется в напряжение постоянного тока и через делитель на резисторах 68, 69 подается на пороговый элемент, выполненный на транзисторах 70, 71 в виде триггера с эмиттерной положительной обратной связью через резисторы 72, 73. Коллекторными нагрузками транзисторов 70, 71 являются резисторы 74- 75. Выходной логический сигнал передатчика снимается с коллекторной нагрузки транзистора 71 через выход 59. Питание приемника осуществляется по входу 76 напряжением постоянного тока положительной полярности.
Устройство работает следующим образом.
Коды позиционных мест подвижных объектов
Импульсом с выхода элемента задержки 10, задерживающего импульс на время модификации адреса в сумматоре 4, содержимое ячейки базового адреса блока 5 считывается на вход регистра 2, в который считанный код
мает клавишу
Оператор нажимает клавишу с названием типа подвижных роботов, которые подлежат контролю. Эта клавиша находится на линейке идентификационных клавиш пульта управления (не показана). Допустим, что в данном случае контролю подлежит захват подвижного
jg мает клавишу 15 20
25
30
35
40
45
робота груз взят, и оператор нажи контроль груза. Код от нажатой клавиши поступает на вход 36 устройства и после подачи импульса синхронизации на вход 37 он заносится v регистр 1. Указанный код состоит из двух частей: кода базового адреса первого сообщения и кода числа сообщений, которые подлежат выдаче.
В исходном состоянии все узлы и элементы сброшены в нулевое состояние (цепи установки в исходное начальное состояние не показаны).
С выхода регистра 1 код базового адреса первого сообщения, подлежащего выдаче, поступает на олин вход сумматора 4, на другой вход которого подается код с выхода счетчика 6.
Однако счетчик 6 в данный момент времени сброшен, поэтому на втором входе сумматора 4 будет код, равный нулю. Синхроимпульс с входа 37 параллельно с записью кода в регистр 1 проходит через элемент ИЛИ 9 на элемент задержки 17, где задерживается на время записи кода в регистр 1, и затем поступает как на вход элемента задержки 18, так и на синхронизирующий вход сумматора 4, суммирующего код базового адреса с выходным кодом счетчика, равным в данный момент 000...0.
В результате на выходе сумматора 4 установится код базового адреса первого сообщения, который поступает на адресный вход блока 5 памяти. В блоке 5 в различных областях записаны идентификационные данные о параметрах подвижных элементов.
Структура кодового слова в ячейках памяти блока 5 имеет вид:
50
од типа подлежащего передае сообщения
записывается импульсом синхронизации, поступающим на синхронизирующий вход с выхода элемента 19 задержки.
Дешифратор 3 расшифровывает коды позиционных мест и высоким потенциалом на одном из своих выхолоп откры
вает те группы элементов И 11-13, выходы которых соответствуют позициям указанных, объектов. Другие входы этих же элементов И 11-13 подключены к другому информационному выходу регистра 2, с которого код подвижного робота поступает на выход устройства И, наконец, импульсом с выхода элемента задержки 20 код сообщения выдается через соответствующий выход 43- 45 для индикации0
С выхода элемента 20 задержки импульс поступает также на синхровход компаратора 7, проверяя выполнение
условия равенства кодов со счетчика 6 и числа сообщений в регистре 1. Поскольку это условие не выполняется (считано на индикацию только первое сообщение). то на выходе компаратора сигналов не будет. Импульс син- хронизацки с выхода элемента 20 задерживается также элементом 21 на время работы компаратора 7 и триггера 0 и поступает далее на вход элемен та И 15. Поскольку в данный момент триггер 8 находится в нулевом состоянии, то высоким потенциалом с инверсного выхода он поддерживает элемент И 15 в открытом состоянии и на суммирующий счетный вход счетчика 6 поступает единица, соответствующая одному BbuiaHHOMv сообщению. Па подвижных захватах роботов установлены передатчики 34, я на контрольной точке отсчета - приемник 35.
Дискретный сигнал со входа 53 при его низком уровне разрешает работу генератора 49. При этом электромагнитные колебания в контуре 50 вызывают изменение магнитного поля, направленного я пространство. При сближении магнитных систем 50 и 54 передатчика 34 и приемника 35 i;. некоторое расстояние в контуре 54, настроенном в резонанс на частоту передатчика, появляются электромагнитные колебания, напряжение которых в блоке детектора преобразуется в напряжение постоянного тока, которое подается на вход порогового элемента 58, формирующего при определенном уровне входного напряжения высокий уровень стандартного логического сигнала. При вы
0
5
0
5
входе детектора приравнивается к нулю, и на выходе его уровень напряжения постоянного тока тоже равняется нулю. Следовательно, и на выходе 59 порогового элемента 58 появляется низкий уровень логического сигнала.
Особенностью схем на фиг. 2 и 3 является нечувствительность системы передатчик-приемник к односторонним изменениям питающих напряжений, так как при уменьшении напряжения питания уменьшаются колебания в контуре 50, и тем самым уменьшается амплитуда колебаний в катушке контура 54, и уменьшается напряжение на входе порогового элемента 58, но порог срабатывания тоже уменьшается, так как его определяющее напряжение нестабилизировано и пропорционально величине питающего напряжения.
При перемещении подвижных роботов мимо контрольной точки импульс с выхода 59 поступает на входы элементов И 24-26 и проходит через один из них, открытый дешифратором 3, на вход считывания фиксированной ячейки блока 22 памяти.
В каждой из фиксированных ячеек блока 22 записан код, включающий код типа подвижного робота и код сообщения, соответствующего данному типу подвижного объекта.
Этот код считывается из блока 22 и поступает на входы регистра 23, куда заносится тем же импульсом считывания, прошедшим через элемент ПЛИ 10 и задержанным элементом 31 задержки на время считывания данных из блока 22.
После записи кода в регистр 2J импульсом, задержанным элементом задержки 32 на время занесения кода в регистр 23. опрашивается компаратор 27, сравнивающий код типа подле- 45 жащего передаче сообщения в регистре 23 и кода типа подвижного объекта в регистре 2. Если упомянутые коды сов1-: падают, то компаратор вырабатывает сигнал, устанавливающий триггер 29 в единичное состояние, при котором высоким потенциалом с прямого выхода он открывает элемент И 30, на другой вход которого поступает тот же импульс, задержанный элементом 33 на время сра30
35
40
50
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для селекции признаков подвижных объектов | 1989 |
|
SU1691860A1 |
| Устройство для определения координат подвижных объектов | 1988 |
|
SU1580408A1 |
| Устройство для регистрации подвижных объектов | 1987 |
|
SU1492356A1 |
| Устройство для контроля и регистрации потоков подвижных объектов | 1987 |
|
SU1501113A1 |
| Устройство для распознавания образов | 1991 |
|
SU1798806A1 |
| Устройство для сбора данных о состоянии массы, перемещаемой технологическими линиями | 1989 |
|
SU1810897A1 |
| Устройство для выдачи команд об изменении движения транспорта | 1986 |
|
SU1446640A1 |
| Устройство для сбора и передачи информации о подвижных объектах | 1988 |
|
SU1543432A1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 1991 |
|
RU2006956C1 |
| Устройство сбора информации о подвижных объектах | 1987 |
|
SU1550552A1 |
Изобретение относится к автоматике и может быть использовано для контроля параметров подвижных объектов. Цель изобретения - повышение надежности устройства, которое содержит регистры, дешифратор, сумматор, блоки памяти параметров объекта и кодов сообщений, реверсивный счетчик, компараторы, триггеры, элементы ИЛИ, группы элементов И, элементы И, элементы задержки, приемник и передатчик сигналов о положении объектов контроля. Устройство обеспечивает контроль, фиксацию и анализ параметров, характеризующих перемещение подвижного объекта. 2 з.п.ф-лы, 3 ил. «
соком уровне на входе передатчика про- 55батывания компаратора. 27 и триггера
исходит срыв генерации генератора 49,29. Этот импульс проходит на выход
колебания в контуре 50 затухают и, еле-46 устройства через элемент И 30 и
довательно, исчезают колебания в кон-далее поступает, например, в канал
туре 54 приемника 35. Напряжение напрерывания ЭВМ.
По этому сигналу ЭВМ переходит на подпрограмму опроса содержимого регистра 23, информационные выходы которого подключены ко входам эпементов И 28. С этой целью на вход 41 приходит сигнал опроса, который во-первых, поступает на другие входы элементов И 28, переписывая содержимое регистра 23 через элементы И 28 на выход 47; во-вторых, сбрасывает триггер 29 в нулевое состояние и, в-третьих, через элемент ИЛИ 9 вновь поступает в тактирующею цепочку элементов задержки 17-21.
Если же код регистра 2j будет отличаться от кода регистра 2, компаратор 27 не будет вырабатывать сигналов. В этом случае импульс с выхода элемента J3 задержки через элемент И 3D не пройдет, так как последний будет блокирован низким потенциалом с прямого выхода триггера Зато будет открыл1 элемент 16 И высоким потенциалом с инверсного выхода триггера 29$ и импульс с выхода элемента И 16 проходит как на выход 4У устройства, сиг нализируя об ошибке в параметрах подвижного робота, так и на вычитающий вход счетчика 6, уменьшая его содержи мое на единицу, и на вход элемента ИЛИ 9, возвращая устройство на новый цикл работы.
Работа устройства описанным образом повторяется до тех пор, пока счетчик 6 не зафиксирует число выданных сообщений, равное тому числу, которое записано в регистре 1. Компаратор 7 за жсирует факт этого равенства по сигналу с выхода элемента задержки 20 и установит триггер 8 в единичное состояние, при котором элемент И 14 будет открыт, а элемент И 15 - закрыт.
Тогда тот же импульс, задержанный элементом 21 на время срабатывания компаратора 7 и триггера 8, проходит через элемент И 14 как на выход 42 в качестве сигнала окончания контроля, так и на входы сброса триггера 8, счетчика 6, регистров 1 и 23, подготавливая устройство к новому циклу контроля.
Формула изобретения 55
5
0
5
0
5
5
0
5
0
тор, блок памяти параметров объекта, реверсивный счетчик, первый компаратор, первый триггер, два элемента ИЛИ, три группы элементов И, три элемента И и пять последовательно соединенных элементов задержки, информационный вход первого регистра является входом устройства для ввода кода контролируемой операции, вход разрешения записи первого регистра и первый вход первого элемента ИЛИ подключены к входу синхронизации устройства, входы сброса первого и третьего регистров, сумматора и реверсивного счетчика и нулевой вход первого триггера соединены с выходом первого элемента И, который является выходом сигнализации окончания работы устройства, первые входы первого и второго элементов И связаны с выходом пятого элемента задержки, вход синхронизации первого компаратора и первые входы элементов И трех групп подключены к выходу четвертого элемента задержки, вход разрешения записи второго регистра подключен к выходу третьего элемента задержки, информационный вход - к выходу блока памяти параметров объекта, первая группа выходов - к группе входов дешифратора, а вторая группа выходов - к группам входов элементов И групп с первой по третью, вторые входы которых соединены с выходами дешифратора, выходы элементов И групп с первой по третью являются выходами устройства для выдачи информационных сообщений о перемещении объекта контроля, выход сумматора связан с адресным входом блока памяти параметров объекта, входы первого и второго слагаемых - соответственно с первым выходом перного регистра и с выходом реверсивного счетчика, а вход разрешения суммирования - с выходом первого элемента задержки, вход которого подключен к выходу первого элемента ИЛИ, выход второго элемента задержки соединен со входом разрешения считывания первого блока постоянной памяти, входы операндов первого компаратора связаны соответственно со вторым выходом первого регистра и с выходом реверсивного счетчика, а выход - с единичным входом триггера, прямой и инверсный выходы которого подключены соответственно ко вторым входам первого и второго элементов И, выход второго элемента И соединен с суммирующим входом
реверсивного счетчика, отличаю- Bj e e с я тем, что, с целью повышения надежности устройства путем контроля параметров перемещения объектов, в устройство введены блок памяти ко- дов сообщений, элементы И с четвертог по седьмой, второй компаратор, четвертая группа элементов И, второй триггер, последовательно соединенные элементы задержки с шестого по восьмой, передатчик и приемник сигналов о положении объекта контроля, связанные между собой посредством электромагнитных колебаний, вход передатчика сигналов о положении объекта контроля является входом запуска устройства, выход приемника сигналов о положении объекта контроля соединен с первыми входами элементов И с четвертого по шестой, вторые входы кото- рых связаны с выходами дешифратора, а выходы - с входами разрешения считывания блока памяти кодов сообщений и со входами второго элемента ИЛИ, вычитающий вход реверсивного счетчика, второй вход первого элемента ИЛИ и выход устройства для сигнализации о наличии ошибок в параметрах перемещения объекта контроля подключены к выходу третьего элемента И, первый вход которого соединен с инверсным выходом второго триггера, а второй вход и первый вход седьмого элемента И связаны с .выходом восьмого элемента задержки, вход синхронизации второго компаратора подключен к вы ходу седьмого элемента задержки, входы операндов соответственно - к первой группе выходов третьего регистра и к второй группе выходов второго регистра, а выход - к единичному
0 5 5 0
0
входу второго триггера, прямом выход которого соединен со вторым входом седьмого элемента И, я нуле- вой вход и первые входы элементов И четвертой группы и третий вход первого элемента ИЛИ связаны со входом устройства для опроса зафиксированных сообщений о перемещении объекта, выход седьмого элемента И является выходом устройства для сигнализации о прерывании работы, выходы элементов И четвертой группы служат для выдачи устройством зафиксированных сообщений о перемещении объекта, вторые входы элементов И четвертой группы подключены к второй группе выходов третьего регистра, информационный вход которого соединен с выходом блока памяти кодов сообщения, а вход разрешения записи - с выходом шестого элемента задержки, вход которого связан с выходом второго элемента ИЛИ.
с контурной катушкой, концы которой подключены к обкладкам емкостного элемента и входам детектора, выход которого соединен со входом порогового элемента, выход которого является выходом приемника сигналов.
Щ
J2. -Г
I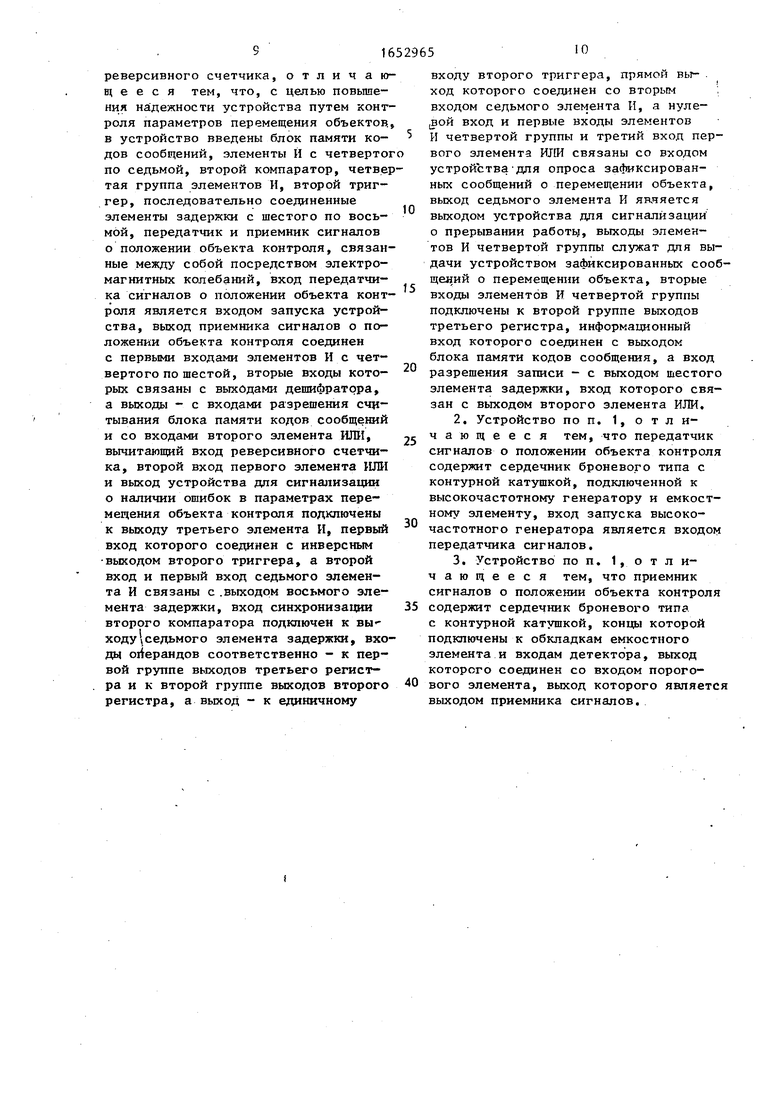
| Заявка ФРГ Р 3409980, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Заявка ФРГ К 3625271, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
