Изобретение относится к приборостроению, а именно к пневматическим пропорционально-интегральным регуляторам с ограничениями выходного сигнала с защитой от насыщения и безударным переключением с ручного (дистанционного) режима управления на автоматический, даже при неравенстве регулируемого параметра его заданному значению.
Целью изобретения является повышение динамической точности регулятора.
На чертеже приведена принципиальная схема регулятора.
Регулятор содержит пропорциональное звено 1, емкость 2, переменный дроссель 3, многомембранный элемент 4 сравнения, первый, второй и третий переключающие клапаны 5-7, первьш, второй и третий постоянные дроссели 8-10, два встречно включенных и параллельно установленных диода 11 и 12 со сдвигами и задатчик 13 опорного давления Poiv .
Входы пропорционального звена 1 соединены с входными каналами задания РЗ и параметра Р , выход его РВЬ,, через переключающий клапан 5 соедине с выходным канапом Р (исполнительный механизм) регулятора и одним входом третьего переключающего клапана 7, другой вход которого подключен к задатчику 13 опорного давления Р. Другой вход первого переключающего клапана 5 может быть подключен к ка налу Рд., дистанционного управления. Выход PQ- кногомембранного элемента 4 сравнения через второй переключающий клапан 6, второй постоянньш дроссель 9 и диоды 11 и 12 соединен с емкость 2, единичным входом пропорциональног звена 1, через первьш постоянньш дроссель 8 - с первой плюсовой камерой элемента 4 сравнения, через третий постоянный дроссель 10 - с другим выходом второго переключающего клапана 6. Р„ пропорционального звена 1 подклк Чен также к первой минусовой камере элемента 4 сравнения, а через переменный дроссель 3 - к .емкости 2. Другой плюсовой вход :элемента 4 сравнения -лодключен к выходу третьего переключающего клапана 7. Управляющие камеры переключающих клапанов соединены с каналом ком командного сигнала.
Регулятор работает следующим образом.
2460512
Предварительно з-адатчиком 13 устанавливают опорное давление Р , а на диодах 11 и 12 выставляются поло
жи тельные сдвиги д , ил ), равные й„ Р„„
РОИ . где Р„ и и верхнее значения
й,0
д
ь
г - Р
Ре
(
И
- нижнее
заданного диапа
зона изменения выходного сигнала Р пропорционального звена 1. Значение опорного давления Р выбирается внутри заданного диапазона изменений Р„.
BWA
Если Р„, (Р„ + yi ii то сдвиги на диодах будут одинаковьгми: (Ре Ри)/2.
В регшме автоматического управления командный сигнал равен нулю (О кПа),, вследствие чего выходной канал Р (исполнительный механизм) соединяется с выходом Р, пропор- ционгшьного звена через первый переключающий клапан 5, Выходной сигнсш РО задатчика 13 через третий
клапан 7 подключен к плюсовой камере элемента 4 сравнения, выходной (РО ) которого через второй клапан 6 и дроссель 9 поступает на входы диодов 11 и 12. Оба диода II и 12 закрыты при выполнении условия
Р Р
н вых выходной
Р
Иными словами, пока л РВ, изменяется внутHbiX
ри заданного диапазона, регулятор работает в линейном режиме и реализует стандартный попорционально-ин- тегргшьный закон регулирования.
Если выходной сигнал Р , изме- няясьз становится больше верхнего граничного уровня Р, , давление Р на выходе элемента 4 сравнения уменьшается и диод 12 переходит в проводящее состояние (открывается)с Действительно, диод 12 открывается, если в статическом режиме давление Р , в емкости 2 становится больше суммы даБлени1Й Р на выходе элемента 4 сравнения и усилия 4 g пружины диода,
+ л
в
где Р„ Р,
Р..
ком режиме),
бы,
(1)
(в статичеса U, Рп - Р,
Тогда выражение (1) виде
он
перепишется
Р., Р.
+ Р
dn
- Р,
ИЛИ Р Р - Р, +
или о - Р + Р ,
ftblX.
I.
т.е.
Р«
- РОИ
Таким образом, условие (1) эквивалентно условию Р Р , при выполрыл
3
нении которого открывается диод 12. Благодаря этому начинается уменьшение давления в емкости 2 и соответс венно выходного сигнала Р,,,. до
Dpi J(
восстановления равенства „., Р« .
РЬ л р
Аналогично при уменьшении выходного сигнала Р„ ниже граничного
Ьгх
значения Р давление Р, на выходе элемента 4 сравнения увеличивается, а сопло диода II открывается. В результате давление в емкости 2 и сигнал Р,
г1(Л
на выходе пропорционального звена 1 увеличивается до выполнения условия ,. Р .
tjbtX и
в отличие от известных регуляторов, процесс ограничения выходного . сигнала не сопровождается автоколебаниями, так как элемент 4 сравнения реализует операцию непрерывного суммирования. Кроме того, для улучшения динамики процесса ограничения выходного сигнала установлены первый 8 и второй 9 постоянные дроссели (фо, 18 и 0,32 мм).
В режиме дистанционного управления подается командный сигнал Р, равный единице (140 кПа), вследствие чего переключаются клапаны 5-7, Управление исполнительным механиз - мом осуществляется от канала дистанционного управления Р . Давле- ние канала Р через переключающий клапан 7 поступает в плюсовую камеру элемента 4 сравнения, выход которого через переключающий клапан 6 и третий постоянный дроссель 10 (фО,5мм ) теперь подключен к емкости 2, Таким образом, на базе элементов 2,4,6, 8 и 10 набирается интегральное звено, в качестве регулируемой переменной которому подается выходной сигнал Pgtix пропорционального звена 1, а в качестве задания - давление канала дистанционного управ ленИя Рду .
Интегральное звено, набранное на элементах 2,4,6,8 и 10, изменяет давление Р в емкости 2 до выполнения условия Р Р . То есть давление
вых P,,v следит за давлением в выходном
ftP X
канале Р регулятора. Таким образом переход на режим автоматического управления осуществляется без скачка давления в выходном канале Р ре46051
гулятора, даже при неравенстве регулируемой величины, Р, ее заданному значению Р, .
5 Формула изобретения
Пневматический пропорционально- интегральный регулятор, содержащий пропорциональное звено, емкость и
to переменный дроссель настройки времени изодрома, многомембранный элемент сравнения с первым постоянным дросселем на входе в его первую плюсовую камеру и три переключающих
J5 клапана, управляющие камеры которых соединены с каналом командного сигнала, входы пропорционального звена соединены с входными каналами задания и параметра, а выход его через
2Q первый переключающий клапан подключен к выходному каналу, через переменный дроссель - к емкости и единичному входу пропорционального звена, выход которого подключен также
к первой минусовой камере многомембранного элемента сравнения, выход которого соединен с его другой мину- соврй камерой и входом второго переключающего клапана, с другой плюсовой камерой элемента сравнения соединен выход третьего переключающего клапана, один вход которого под- к,аючен к выходному каналу регулятора, другой вход первого переключающего клапана подключен к каналу дистанционного управления, о т л и ч а ю- щ и и с я тем, что, с целью повьше- ния динамической точности регулятора, в нем дополнительно установлен за- датчик опорного давления, второй и
третий постоянные дроссели и два встречно включенных и параллельно установленных пневматических диода со сдвигами, выходы которых подключены к емкости и первому постоянному дросселю, а входы диодов через второй постоянный дроссель соединены с первым выходом второго переключающего клапана, другой выход которого через третий постоянньй
дроссель подключен также к емкости, а задатчик опорного давления подключен к другому входу третьего переключающего клапана.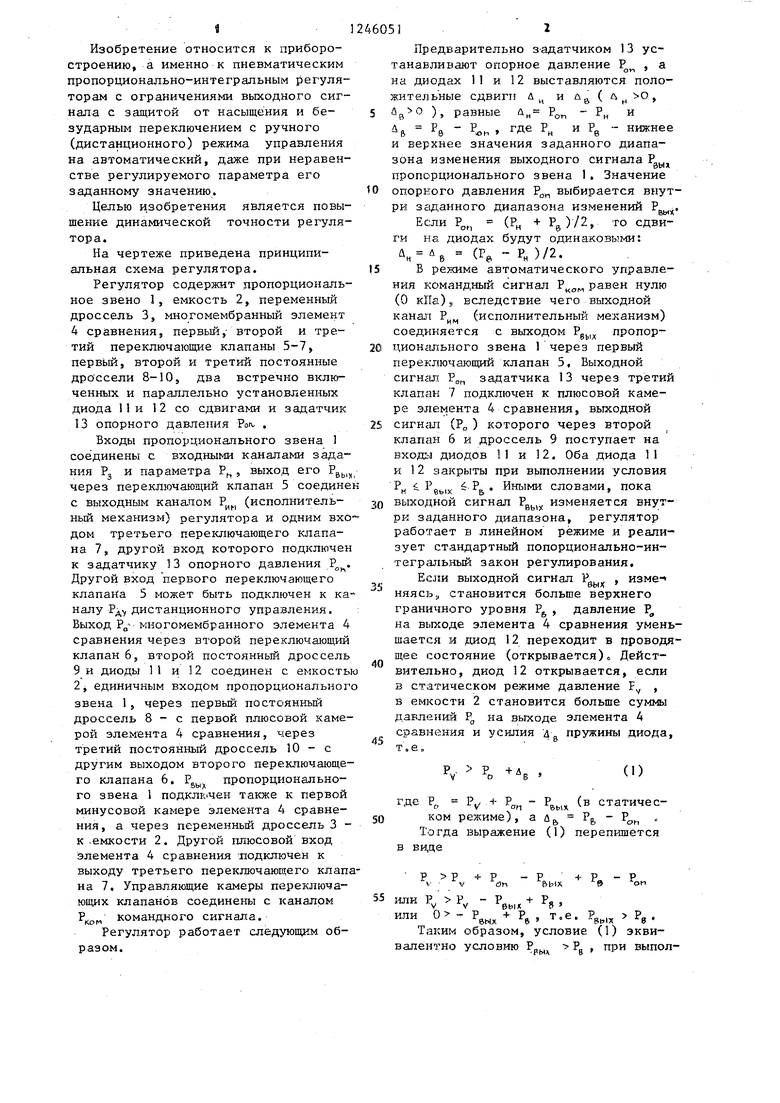
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический пропорционально-интегральный регулятор | 1990 |
|
SU1691818A2 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
| Пневматический регулятор | 1989 |
|
SU1619230A2 |
| Пневматический регулятор | 1985 |
|
SU1262449A1 |
| Пневматический прерывистый регулятор | 1986 |
|
SU1399698A2 |
| Устройство для управления частотно- иМпульСНыМ дОзАТОРОМ | 1979 |
|
SU817480A1 |
| Пневматическое устройство ограничения "шага" сигнала задания регуляторам | 1988 |
|
SU1583942A1 |
| Пневматический резервный регулятор | 1990 |
|
SU1734073A1 |
| Пневматический пропорциональноинтегральный регулятор | 1975 |
|
SU532081A1 |
| Пневматический регулятор | 1987 |
|
SU1474589A1 |
Изобретение относится к пневматическим системам управления. Недос татком известных пневморегуляторов является низкая динамическая точность вследствие превьшения выходным сигналом заданных уровней ограничения (насыщение регулятора). Предлагаемый регулятор, построенный на элементе сравнения, переключающих клапанах, диодах, дросселях, включающий пропорциональное звено, позволяет выходной сигнал регулятора ограничить на заданных уровнях и защитить его от насыщения. Кроме того, схема позволяет обеспечить безударный переход с дистанционного управления на автоматические. 1 ил. с (Л N5 4
| Пневматический регулятор | 1974 |
|
SU531131A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| МНОГОКАНАЛЬНЫЙ РЕГУЛЯТОР | 0 |
|
SU273555A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
