. - . 1
Изобретение относится к строительно-йтделочным машинам и предназначено для шлифования бетонных, мозаичных и других твердых монблитных полов в промышленных и общественных зданиях.
Известна машина для шлифования и полирования поверхностей из бетона, мозаики,. Мрамора, гранита, содержащая двухколесное шасси, установленные на нем шлифовальн 1е круги с приводом от электродвигателя и узел управления
Перемещение и управление такой машиной осуществляете вручную.
Известна также машина для шлифования полов, содержащая самоходное шасси с ведущими и управляемыми колесами, на котором установлены траверса со смонтированными на ней шлифовальными кругами с электроприводсзм 12.
Нсшичие caMOxojqHoro шасси облегчает условия работы на машине, но не устраняет необходимость постоянного присутствия человека, выполняющего монотонную работу во вредных для здоровья условиях сзагрязненность атмосферы, шум вибрация);. /
Цель изобретения - автоматизация управления машийой.
Поставленная цель достигается тем, что машина снабжейа установленным в ее центре тяжести механизмом подъема поворота шасси машины вокруг вертикальной .оси и датчикгини измерения текущих координат положения машины на плоскости пола, блоком программно0го управления, блоком управления механизмом управляемых колес, блоком управления приводом ведущих колес и блоком управления подъемом и поворотом шасси машины, при этом 5 соответствующие входы блока программного управления соединены с датчиками текущих координат и выходом блока управления подъемом и поворотом шасси машины, а выходы блока про0граммного управления - с блоком управления механизмом поворота управляемых колес, блоком управления приводом ведущих колес и входом блока управления подъемом и поворотом шасси
5 машины, а выход последнего связан с блоком управления приводом ведущих колес.
С целью сохранения ориентации датчиков измерения текущих координат в
0 заданных направленияхпоследние установлены на вертикальной несущей оси механизма подъема и поворота шасси машины.
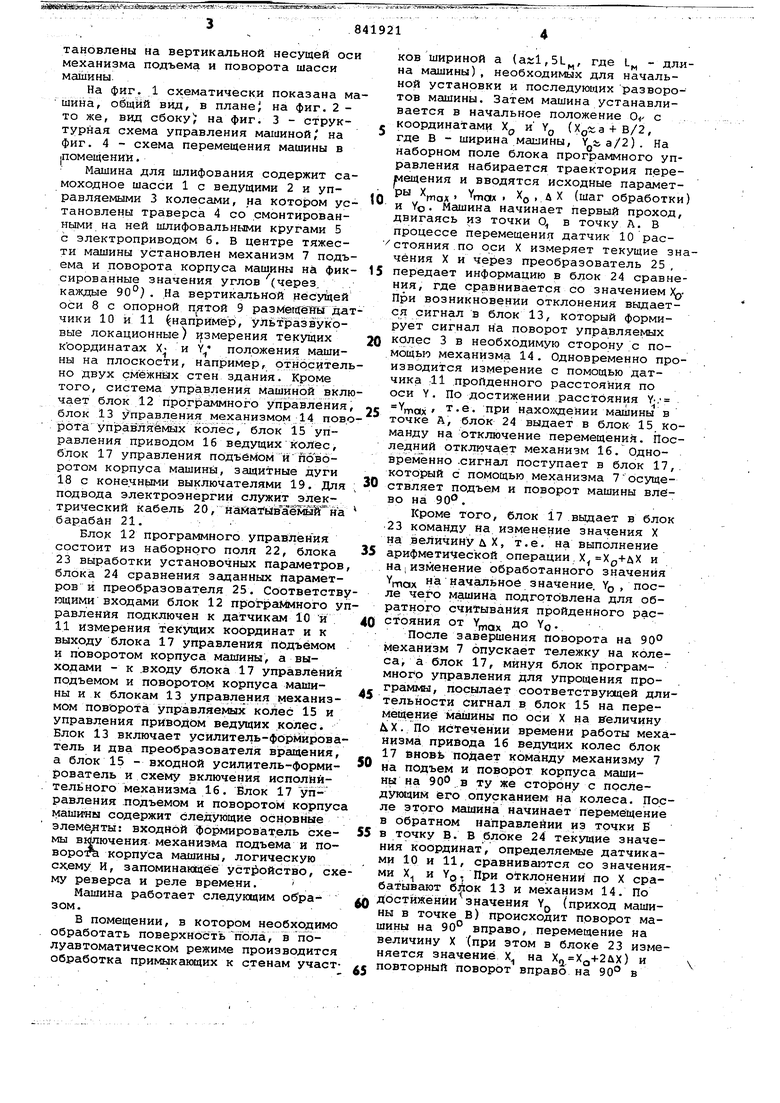
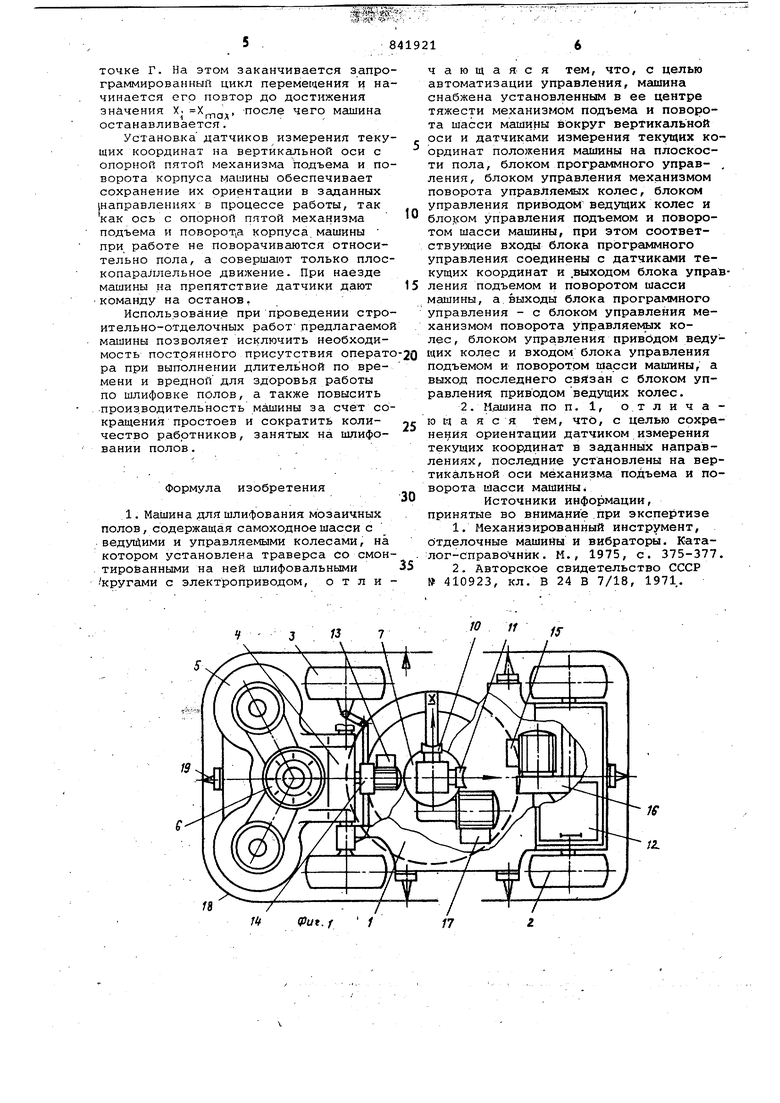
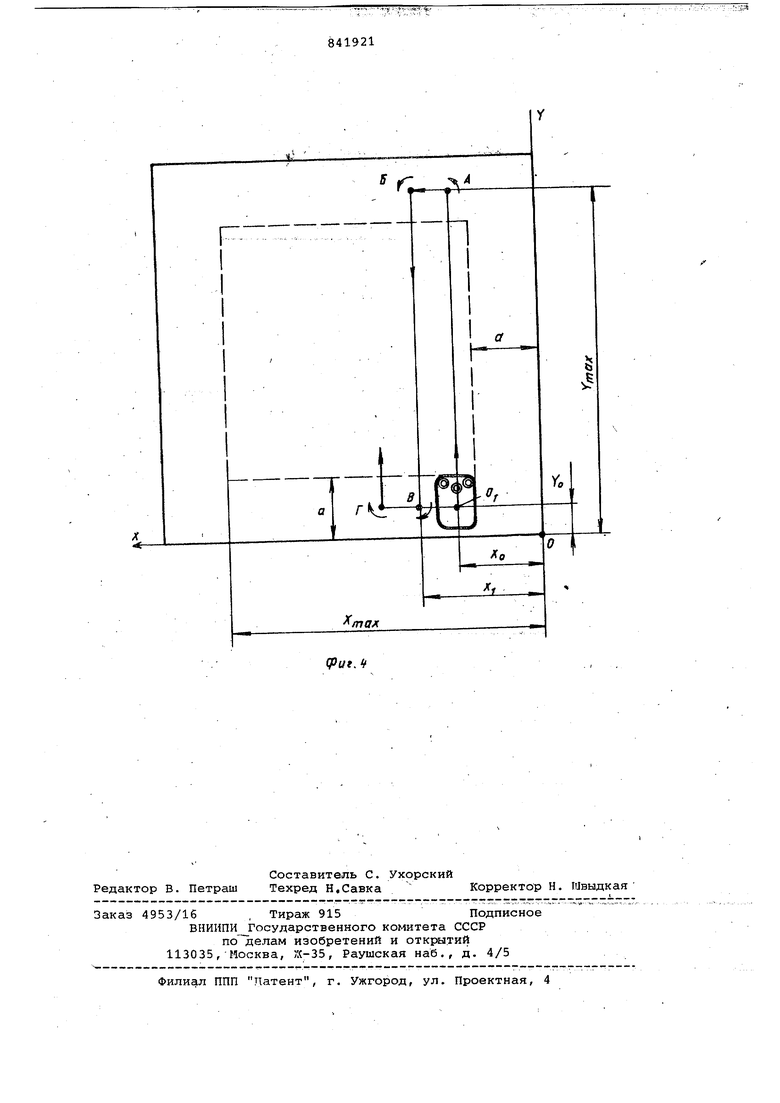
На фиг. 1 схематически показана машина, общий вид, в планер на фиг. 2 то же, вид сбоку 1; на фиг. 3 - структурная схема управления машиной, на фиг. 4 - схема перемещения машины в помещении.
Машина для шлифования содержит самоходное шасси 1 с ведущими 2 и управляемыми 3 колесами, на котором установлены траверса 4 со смонтированными на ней шлифовальными кругами 5 с электроприводом б. В центре тяжести машины установлен механизм 7 подъема и поворота корпуса машины на фиксированные значения углов (через, каждые 90°} . На вертикальной нёсуЬ ей оси 8 с опорной пятой 9 размегагёТГьГ датчики 10 и 11 например, ультразвуковые локационные) измерения текущих координатах Х- и положения машины на плоскости, например, относительно двух смежнЕЗх стен здания. Кроме того, система управления машин(эй включает блок 12 п:рограммного управления, блок 13 управления механизмом 14 поворота управляемых колес, блок 15 управления приводом 16 ведущих солёс, блок 17 управления подъемом и поворотом корпуса машины, защитные дуги 18 с конечными выключателями 19. Для подвода электроэнергии служит электрический кабель 20, на1йать1в аёмйй °на барабан 21.
Блок 12 программного управлён ия состоит из наборного поля 22, блока 23 выработки установочных параметров, блока 24 сравнения заданных параметров и преобразователя 25. Соответствующими входами блок 12 программного управления подключен к датчикамЮ и/ 11 измерения текущих координат и к выходу блока 17 управления подъёмом и поворотом корпуса машины, а выходами - к .входу блока 17 управления подъемом и поворотом корпуса машины и к блокам 13 управления механизмом повЬрота управляемых колес 15 и управления приводом ведущих колес. Блок 13 включает усйлитель-фс рмйрователь и два преобразователя в ращения, а блок 15 - входной усилитель-формирователь и схему включения исполнительного механизма 16. Ёлок 17 управления .подъемом и поворотом корпуса машииы содержит следующие основные элемед1ты: входной формирователь схемы включения механизма подъема и поворота корпу са машины, логическую сх,ему И, запоминающее устройство, схему реверса и реле времени.
Машина работает следующим образом.
В помещении, в котором необходимо . обработать поверхнбстьп 6ла, в полуавтоматическом режиме производится обработка примыкающих к стенам участ841921
ков шириной а (as;l,5L, где 1„ - длина машины), необходимых для начальной установки и последующих разворотов машины. Затем машина устанавливается в начальное положение Oi- с .
-координатами Х и Y (XoCta + B/2, где В - ширина машины, Yi;a/2). На наборном поле блока программного управления набирается траектория перемещения и вводятся исходные парамет0 Р гяах . Х , д X (шаг обработки)
и YO Машина начинает первый проход, двигаясь из точки Q, в точку л. Б процессе перемещения датчик 10 рас стояния по оси X измеряет текущие значения X и через преобразователь 25,
5 передает информацию в блок 24 сравнения, где сравнивается со значением возникновении отклонения выдается сигнал в блок 13, который формирует сигнал на поворот управляемых
0 колес 3 в необходимую сторону с помощью механизма 14. Одновременно производится измерение с помощью датчика 11 пройденного расстояния по оси Y. По достижении расстояния Y,
с тах при нахо : дении машины в точке А, блок 24 выдает в блок 15. Команду на отключение перемещений. Послед1шЯ отключает механизм 16. Одновременно .сигнал поступает в блок 17,. который с помощью механизма 7осуще0 ствляет подъем и поворот машины влево на 90.
Кроме того, блок 17 выдает в блок 23 команду На изменение значения X на величину UX, т.е. на выполнение
5 арифметической операции,Х Хд+дХ и на Изменение обработанного значения тах на начальное значение. YQ , после 4efo машина подготовлена для обратного считывания пройденного расстояния от до YQ.
После завершения поворота на 90° механизм 7 опускает тележку на колеса, а блок 17, минуя блок программного управления для упрощения программы, посылает соответствующей дли тельности сигнал в блок 15 на перемещение машины по оси X на величину Х. По истечении времени работы механизма привода 16 ведущих колес блок 17 вновь подает команду механизму 7
на подъем и поворот корпуса машины на 90 в ту же сторону с посЛедунвдим его опусканием на колеса. После этого машина начинает перемещение в Обратном направлейии из точки Б
5 в точку В. Б блоке 24 текущие значения координат, определяемые датчиками 10 и 11, сравниваются со значениями X., и YQ , При отклонении по X срабатывают бйок 13 и механизм 14. По
достижении значения Y (приход машины в точке в) происходит поворот машины на 90° вправо, перемещение на величину X (при этом в блоке 23 изменяется значение Х на Хц Хо+2дх) и у повторный поворот вправо на 90° в точке Г. На этом заканчивается запро граммированный цикл перемещения и на чинается его повтор до достижения значения Х )( После чего машина останавливается. Установ,ка датчиков измерения теку щих координат на вертикальной оси с опорной пятоП механизма подъема и по ворота корпуса машины обеспечивает сохранение их ориентации в заданных (Направлениях в процессе работы, так как ось с опорной пятой механизма подъема и noBOpOTja корпуса, машины при работе не поворачиваются относительно пола, а совершают только плос копараллельное движение. При наезде машины на препятствие датчики дают команду на останов, Использование при проведении стро ительно-отделочных работ предлагаемо машины позволяет исключить необходимость постоянного присутствия операт ра при выполнении длительной по времени и вредной для здоровья работы по шлифовке полов, а также повысить произ.водительность машины за счет со кращения простоев и сократить количество работников, занятых на шлифовании полов. Формула изобретения 1. Машина для шлифования мозаичных полов, содержащая самоходное шасси с веду14ими и управляемыми колесами, на котором установлена траверса со смон тиробанными на ней шлифовальными кругами с электроприводом, отли fO чающаяся тем, что, с целью автоматизации управления, машина снабжена установленным в ее центре тяжести механизмом подъема и поворота шасси машины вокруг вертикальной оси и датчиками измерения текущих координат положения машины на плоскости пола, блоком программного управления, блоком управления механизмом поворота управляемых колес, блоком управления приводом ведущих колес и бло1;сом управления подъемом и поворотом шасси машины, при этом соответствующие входы блока программного управления соединены с датчиками текущих координат и .выходом блока управления подъемом и поворотом шасси машины, а выходы блока программного управления - с блоком управления механизмом поворота управляе№1 Х колес , блоком управления приводом ведущих колес и входом блока управления подъемом и поворотом шасси машины, а выход последнего снизан с блоком управления приводом ведущих колес. 2. Машина по п. 1, отличаю щ а я с я тем, что, с целью сохранецкя ориентации датчиком измерения текущих координат в заданных направлениях, последние установлены на вертикальной оси механизма подъема и поворота шасси машины Источники информации, принятые во внимание.при экспертизе 1.Механизированный инструмент, бтделочные машийы и вибраторы. Каталог-справочник. М., 1975, с. 375-377. 2.Авторское свидетельство СССР № 410923, кл. В 24 В 7/18, 1971. ff
fpue.Z
io
ii
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для шлифования мозаичных полов | 1980 |
|
SU963818A2 |
| Машина для шлифования | 1989 |
|
SU1646803A1 |
| Устройство программного управления машиной для шлифования полов | 1985 |
|
SU1335931A1 |
| Машина для шлифования | 1980 |
|
SU931395A1 |
| Способ управления курсом самоходного агрегата | 1987 |
|
SU1493981A1 |
| СПОСОБ ШЛИФОВАНИЯ ПОВЕРХНОСТЕЙ ТЕЛ ВРАЩЕНИЯ ПЕРЕМЕННОЙ КРИВИЗНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2047465C1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Машина для шлифования | 1978 |
|
SU745652A1 |
| СВАРОЧНАЯ СИСТЕМА С ДВУМЯ НАПРАВЛЯЮЩИМИ | 2022 |
|
RU2795223C1 |
(put,f
841921
