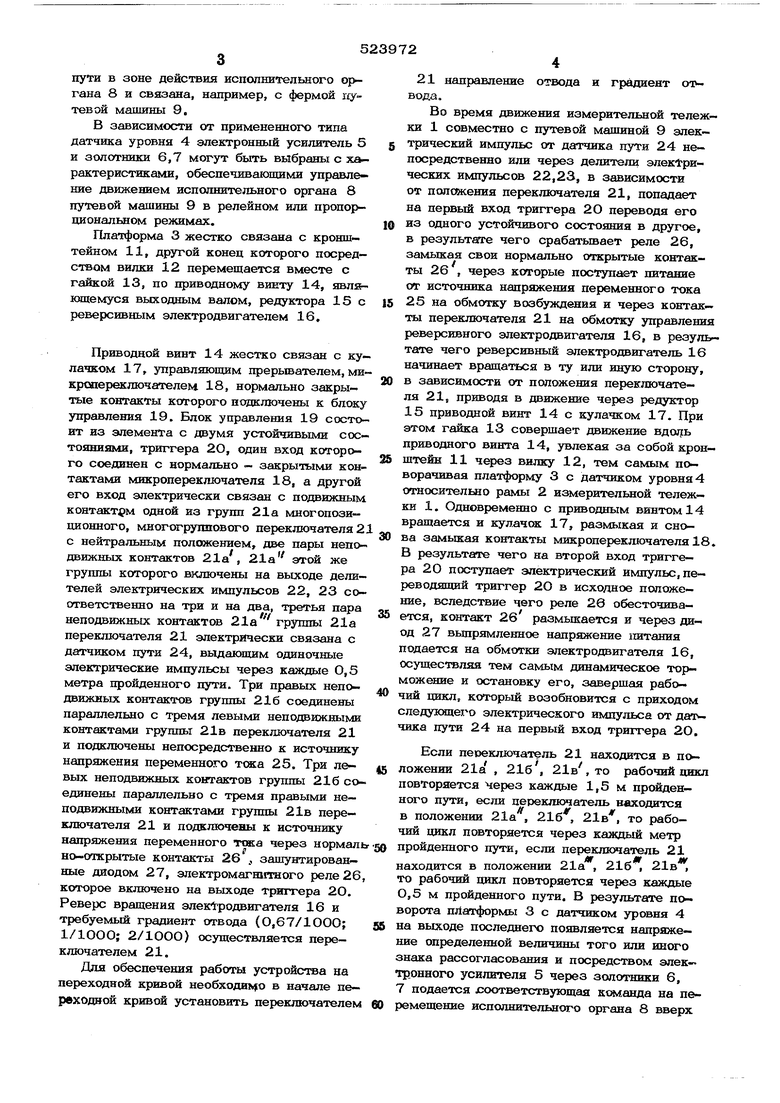
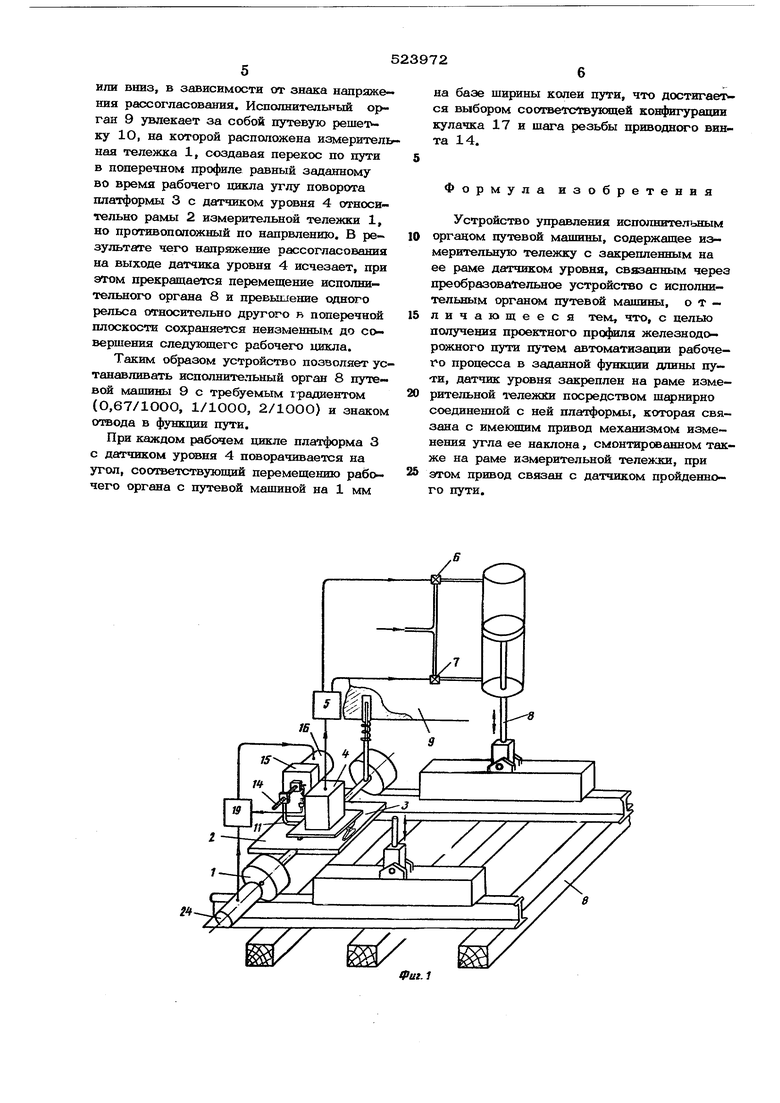
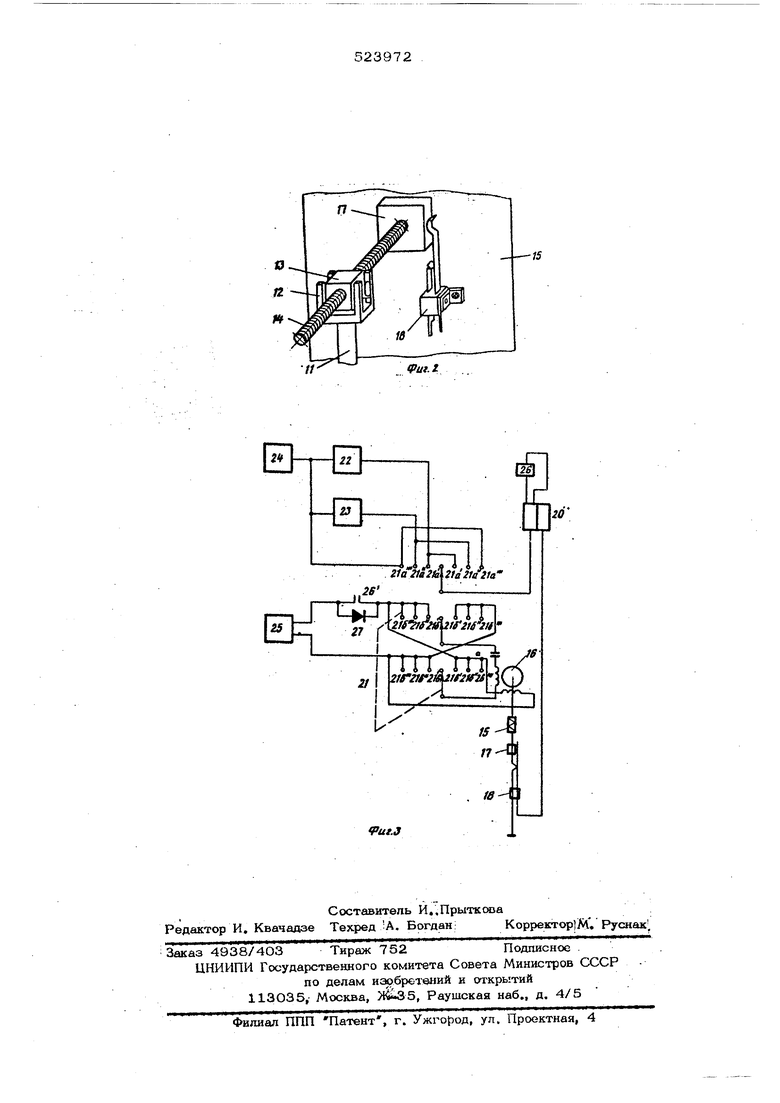
(54) УСТРОЙСТВО УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ ПУТЕВОЙ МАШИНЫ пути в зоне действия исполнительного органа 8 и связана, например, с фермой г утевой машины 9, В зависимости от примененного типа датчика уровня 4 электронный усилитель 5 и золотники 6,7 могут быть выбраны с характеристиками, обеспечивающими управление движением исполнительного органа 8 путевой машины 9 в релейном или пропорциональном режимах. Платформа 3 жестко связана с кронштейном 11, другой конец которого посредством вилки 12 перемещается вместе с гайкой 13, по приводному винту 14, явлан кяцемуся выходным валом, редуктора 15 с реверсивным электродвигателем 16, Приводной винт 14 жестко связан с кулачком 17, управляющим прерьшателем, ми- крсяереключателен 18, нормально закрытые контакты которого подключены к блоку управления 19. Блок управления 19 состоит из элемента с двумя устойчивыми сосТО5ШИЯМН, триггера 2О, один вход которого соединен с нормально - закрытыми контактами микропереключателя 18, а другой его вход электрически связан с подвижным контактам одной из групп 21а многопози- ционного, многогруппового переключателя 2 с нейтральным положением, две пары неподвижных контактов 21а , 21 а этой же группы которого включены на выходе делителей электрических импульсов 22, 23 соответственно на три и на два, третья пара неподвижных контактов группы 21а перюключателя 21 электрически связана с датчиком пути 24, выдающим одиночные электрические импульсы через каждые 0,5 метра пройденного пути. Три правых неподвижных контактов группы 216 соединены параллельно с тремя левыми неподвижными контактами группы 21в переключателя 21 и подключены непосредственно к источнику напряжения переменного т«жа 25. Три левых неподвижных контактов группы 216 соединены параллельно с тремя правыми неподвижными контактакш группы 21в переключателя 21 и подключены к источнику напряжения переменного тока через нормал но-открытые контакты 26 , зашунтирован- ные диодом 27, электромагнитного реле 26 которое включено на выходе триггера 2О. Реверс вращения электродвигателя 16 и требуемый градиент отвода (О,67/1ООО; 1/1ООО; 2/1ООО) осуществляется переключателем 21, Для обеспечения работы устройства на переходной кривой необходик о в начале переходной кривой установить переключателем 21 направление и градиент OTVвода. Во время движения измерительной тележки 1 совместно с путевой машиной 9 электрический импульс от датчика пути 24 непосредственно или через делители электрических импульсов 22,23, в зависимости от полоисения переключателя 21, попадает на первый вход триггера 2 О переводя его ИЗ ОДНОГО устойчивого состояния в другое, в результате чего срабатьшает реле 26, замьпсая свои нормально открытые контакты 26 , через которые поступает питание огг источника напряжения переменного тока 25 на обмотку возбуждения и через контакты переключателя 21 на обмотку управления реверсивного электродвигателя 16, в результате чего реверсивный электродвигатель 16 начинает вращаться в ту или иную сторону, в зависимости от положения переключателя 21, приводя в движение через редуктор 15 приводной винт 14 с кулачком 17. При этом гайка 13 совершает движение вдоль приводного винта 14, увлекая за собой кронштейн 11 через вилку 12, тем самым поворачивая платформу 3 с датчиком уровня 4 относительно рамы 2 измерительной тележки 1. Одновременно с приводным винтом 14 вращается и кулачок 17, размыкая и сно,,, ва замыкая контакты микропереключателя 18. В результате чего на второй вход триггера 20 поступает электрический импульс, переводящий триггер 2О в исходное положение, вследствие чего реле 26 обесточивается, контакт 26 размьшается и через диод 27 вьшрямленное напряжение питания подается на обмотки электродвигателя 16, осуществляя тем самым динамическое торможение и остановку его, завершая рабочий цикл, который возобновится с приходом следукицет о электрического импульса от дат чика пути 24 на первый вход триггера 2О. Если переключатель 21 находится в положении 21а , 216 , 21в, то рабочий цикл повторяется через каждые 1,5 м пройденного пути, если переключатель находится положении 21а , 216 , 21в, то рабов чий цикл повторяется через каждый метр пройденного пути, если переключатель 21 находится в положении 21а , 216, 21 в , то рабочий цикл повторяется через каждые О,5 м пройденного пути. В результате поворота платформы 3 с датчиком уровня 4 на выходе последнего по51вляется напряжение определенной величины того или иного знака рассогласования и посредством электронного усилителя 5 через золотники 6, 7 подается соответствующая комаяца на перемещение исполнительного органа 8 вверх
итш вниз, в зависимсюти от знака напряжения рассогласования. Иснолнительный орган 9 увлекает за собой нутевую решет ку 1О, на которой расположена измерительная тележка 1, создавая перекос по пути в поперечном профиле равный заданному во время рабочего цикла углу поворота платформы 3 с датчиком уровня 4 относительно рамы 2 измерительной тележки 1, но противоположный по напрвленшо. В результате чего напряжение рассогласования на выходе датчика уровня 4 исчезает, при этом прекращается перемещение исполнительного органа 8 и превьпление одного рельса относительно другого в поперечной плоскости сохраняется неизменным до совершения следукацегс рабочего цшсла.
Таким образом устройство позволяет устанавливать исполнительный орган 8 путевой машины 9 с требуемым градиентом (0,67/1000, 1/1000, 2/1000) и знаком отвода в функции пути.
При каждом рабочем цикле платформа 3 с датчиком уровня 4 поворачивается на угол, соответствующий перемещению рабочего органа с путевой мащиной на 1 мм
на базе ширины колеи пути, что достигается выбором соответствующей конфигурации кулачка 17 и шага резьбы приводного винта 14.
Формула изобретения
Устройство управления исполнительным органом путевой машины, содержащее измерительную тележку с закрепленным на ее раме датчиком уровня, связанным через преобразовательное устройство с исполнительным органом путевой машины, о т личающеес я тем, что, с целью получения проектного профиля железнодорожного пути путем автоматизации рабочего процесса в заданной функции длины пути, датчик уровня закреплен на раме измерительной тележки посредством шарнирно соединенной с ней платформы, которая связана с имекшшм привод механизмом изменения угла ее наклона, смонтированном также на раме измерительной тележки, при этом привод связан с датчиком пройденного пути.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для механизированного заряжания грунтов при взрывной проходке профильных выемок | 1980 |
|
SU924495A1 |
| Устройство управления исполнительным органом машины для выправки пути | 1979 |
|
SU863744A1 |
| Устройство управления исполнительным органом путевой машины | 1981 |
|
SU979567A1 |
| Устройство управления исполнительным органом путевой машины | 1982 |
|
SU1023020A1 |
| Машина для разработки пород способом обрушения | 1981 |
|
SU968400A1 |
| Способ выправки пути в продольном профиле и плане и устройство для его осуществления | 1976 |
|
SU667623A1 |
| Устройство для внесения удобрений к дождевальной машине | 1988 |
|
SU1544289A1 |
| Система путевого контроля линейного перемещения рабочего органа | 1977 |
|
SU732122A1 |
| ПУТЕВАЯ ЩЕБНЕОЧИСТИТЕЛЬНАЯ МАШИНА | 2003 |
|
RU2234565C1 |
| Машина для шлифования полов | 1984 |
|
SU1247243A1 |
Т
iput.t
f
Vut.3
