Изобретение относится к автоматизации дорожных машин и может быть использовано на нланировочных и укладочных работах при строительстве и ремонте дорог.
Целью изобретения является повышение точности регулирования рабочим органом.
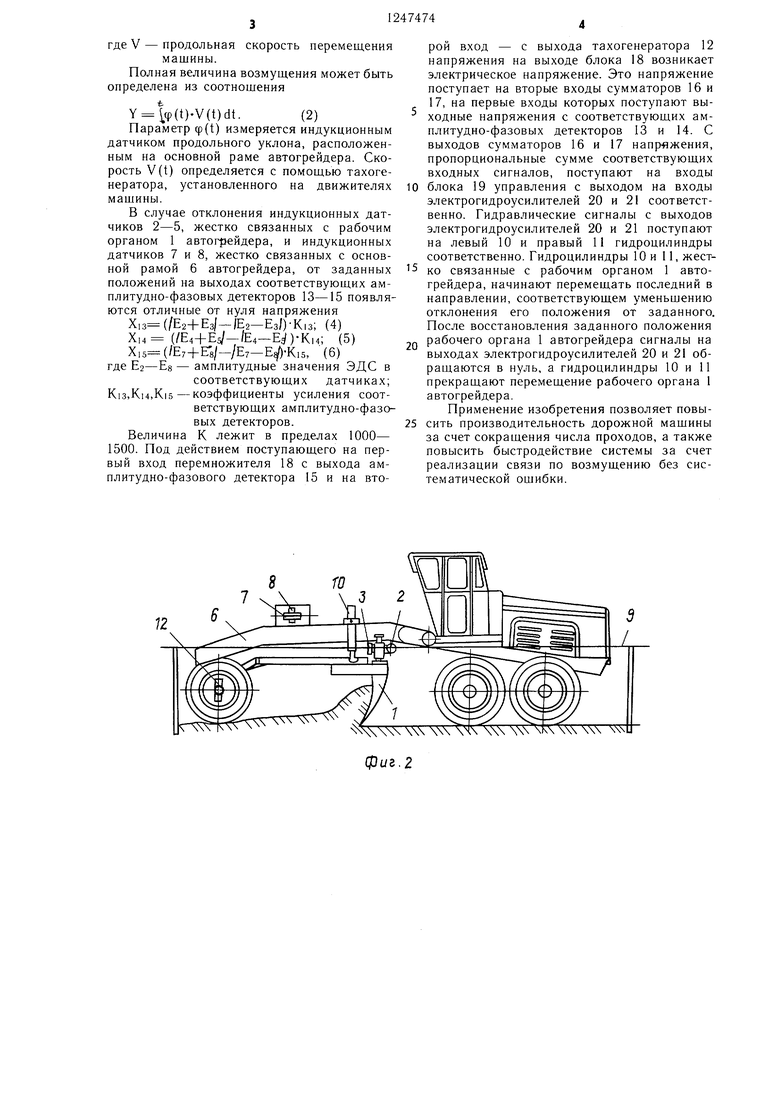
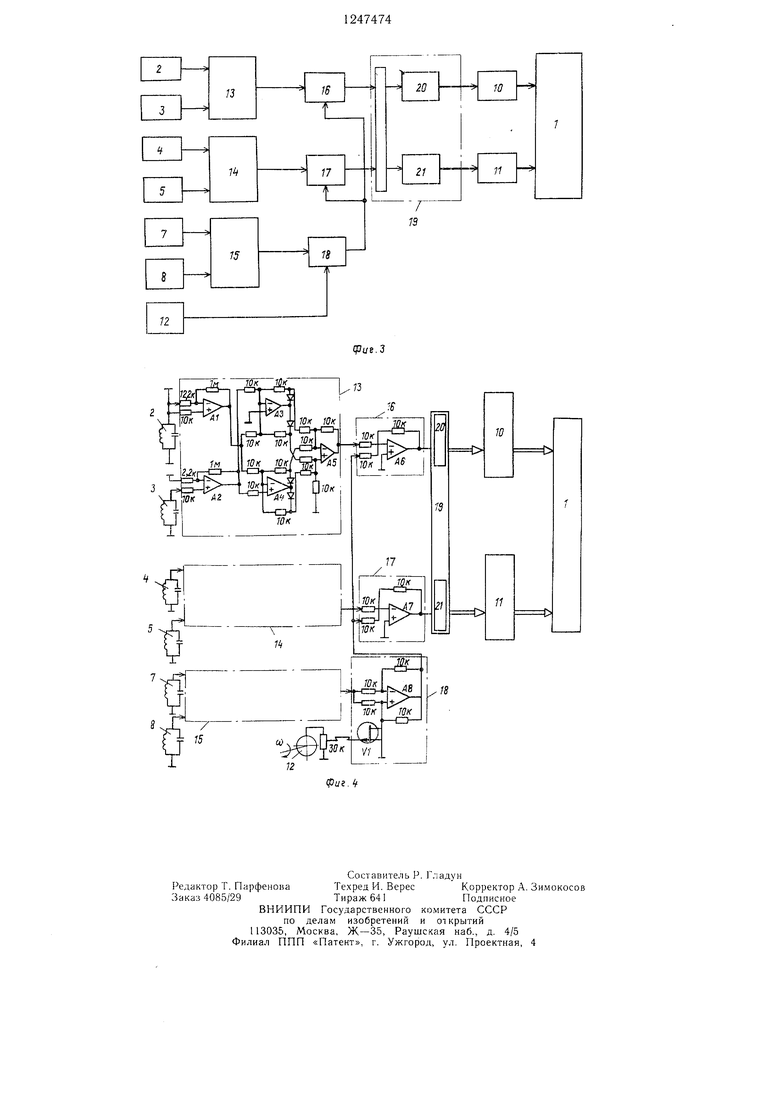
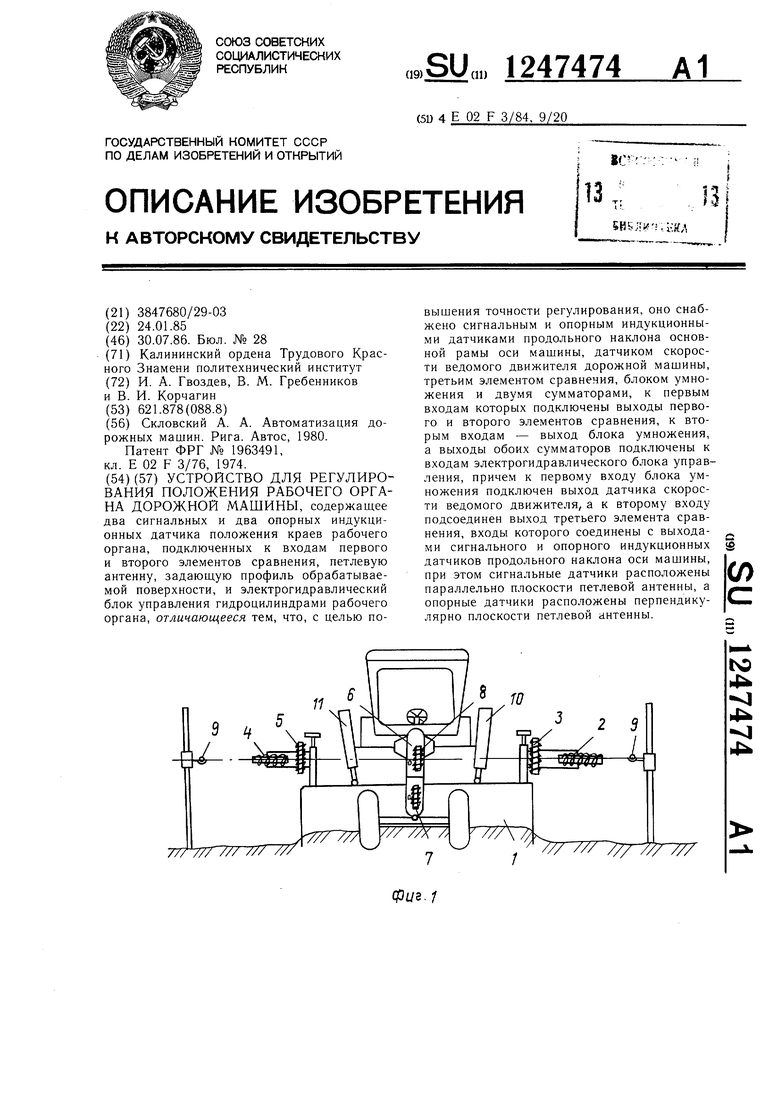
На фиг. 1 изображен объект управления, фронтальная проекция; на фиг. 2 - то же, вид слева; на фиг. 3 - функциональная схема устройства; на фиг. 4 - принциниаль- ная схема устройства.
Устройство содержит по обоим краям рабочего органа 1 на вертикальных штангах индукционные датчики 2, 3 и 4, 5. Датчики 2 и 4 являются сигнальными и расположены в ноперечно-вертикальной плоскости. Датчики 3 и 5 являются опорными и расположены вертикально. На основной раме 6 автогрейдера установлены индукционные датчики 7 и 8 продольного наклона оси машины. Сигнальный датчик 7 расположен в продольно-вертикальной плоскости парал- лельно плоскости петлевой антенны 9, а опорный датчик 8 - перпендикулярно плоскости петлевой антенны. Провод петлевой антенны 9 устанавливается на стойках параллельно требуемым отметкам. Высота установки датчиков 2, 3 и 4, 5 выбирается таким об- разом, чтобы сигнальные датчики 2 и 4 лежали в плоскости петлевой антенны 9.
Индукционные датчики конструктивно выполнены следующим образом.
На сердечник из ферромагнитного ма- териала (ферритовые кольца или стержни) наматывается обмотка из эмалированного провода, содержашая 2000-2500 витков. Наличие ферритового сердечника значительно повышает коэффициент усиления датчика и повышает направленность действия датчика. Поэтому, располагая датчики в продольной или поперечной вертикальных плоскостях, можно получить информацию об угловых и линейных перемещениях в соответствующих плоскостях.
Рабочий орган 1 автогрейдера механически связан с левым гидроцилиндром 10 и правым гидроцилиндром 11. Тахогенератор 12 связан с помощью муфты с ведомым движителем автогрейдера и выполняет роль датчика скорости ведомого движителя, так как пробуксовка передних движителей при движении автогрейдера минимальна.
Выходы сигнального 2 и опорного 3 индукционных датчиков подключены к первому и второму соответственно входам пер- вого элемента сравнения 13, выполненного в виде амплитудно-фазового детектора, выходы сигнального 4 и опорного 5 индукционных датчиков подключены к первому и второму соответственно входам второго элемента сравнения 14 (амплитудно-фазово- го детектора).
Выходы сигнального 7 и опорного 8 индукционных датчиков подключены к первому
5
0
Q 5
0 0
5
0 5
5
и второму соответственно входам третьего элемента сравнения 15, выполненного также в виде амплитудно-фазового детектора. Элементы сравнения {амплитудно-фазовые детекторы) 13-15 представляют собой известные электрические схе.мы, выпо.лненные на операционных усилителях.
Выходы амплитудно-фазовых детекторов 13 и 14 подключены соответственно к первым входам сумматоров 16 и 17, а выход амплитудно-фазового детектора 15 - к первому входу блока умножения 18, ко второму входу которого подключен выход тахогене- ратора 12, блок умножения выполнен на операционном усилителе А8 и полевом транзисторе VI. Выход блока умножения 18 подключен к вторым входам сумматоров 16 и 17, выполненных на операцион.чых усилителях А7, А6, выходы которь : соединены с блоком 19 электрогидравлического управления, представляющим собой серийно выпускаемый электронный блок у |равления, входящий в комплект системы ««Профиль-20. Сигналы с блока 19 поступают на электро- гидрозолотники 20 и 21, также входящие в комплект системы «Профиль-20.
Выходы электрогидрозолотников связаны с входами левого И) и правого 11 гидроцилиндров, механически связанных с рабочий органом 1 автогрейдера. Амплитудно-фазовые детекторы 13 и 14с соответствующими им индукционными датчиками 2, 3 и 4, 5 образуют основные каналы управления положением рабочего органа 1 автогрейдера,. Амплитудно-фазовый детектор 15 с соответствующими ему индукционными датчиками 7 и 8, тахогенератором 12 и блоком умножения 18 образуют связь по возмупхе- нию, которое ггриложе о к автогрейдеру со стороны обрабатрлваемой повеэхности. Благодаря этой связи по воз,у|ущен,ю, структурная схема системы регулирования преобразуется в комбинированную систему.
Устройство работает следующим образом.
Через горизонтально расположенный провод петлевой а(ггенпы 9 nenpepbiBim пропускается переменный э,;1ект)кчеслий ток с эффективным значением ЮО- ЗОО ,мА и частотой около 1000 Гц. Под действием индукции магнитного поля, создаваемого проходящим через петлевую антершу током, в индукционных датчиках 2--8 ,озникает переменная ЭДС той же частоты, что и ток в проводе антенны. С выходов И1 дукпион- 1;ых датчиков в виде электрического напряжения поступают на соответствующие входы амплитудно-фазовых детекторов 13-15.
Величина возмущающего сигнала изменения вертикальной отметки расположения в данном случае определяется косвенным путем как изменение угла тангажа за промежуток времени Д1 из следующего соотношения:
ДЗ Дф-V-At,(1)
где V - продольная скорость перемещения
машины.
Полная величина возмущения может быть определена из соотнощения
(t)V(t)dt.(2)
Параметр (p(t) измеряется индукционным датчиком продольного уклона, расположенным на основной раме автогрейдера. Скорость V(t) определяется с помощью тахоге- нератора, установленного на движителях машины.
В случае отклонения индукционных датчиков 2-5, жестко связанных с рабочим органом 1 автогрейдера, и индукционных датчиков 7 и 8, жестко связанных с основной рамой 6 автогрейдера, от заданных положений на выходах соответствующих амплитудно-фазовых детекторов 13-15 появляются отличные от нуля напряжения
X,3(/E2-fE3/-|E2-E3/)-Ki3; (4)
Х,4 (/Е4+Е5/-/Е4-ЕЛ-КМ.; (5)
X,5(/E7-fE-8/-/E7-E(,f)-Kl5, (6)
где Е2-ES - амплитудные значения ЭДС в соответствующих датчиках; Ki3,Ki4,Ki5-коэффициенты усиления соответствующих амплитудно-фазовых детекторов.
Величина К лежит в пределах 1000- 1500. Под действием поступающего на первый вход перемножителя 18 с выхода амплитудно-фазового детектора 15 и на второй вход - с выхода тахогенератора 12 напряжения на выходе блока 18 возникает электрическое напряжение. Это напряжение поступает на вторые входы сумматоров 16 и 17, на первые входы которых поступают вы- ходные напряжения с соответствующих амплитудно-фазовых детекторов 13 и 14. С выходов сумматоров 16 и 17 напряжения, пропорциональные сумме соответствующих входных сигналов, поступают на входы
0 блока 19 управления с выходом на входы электрогидроусилителей 20 и 21 соответственно. Гидравлические сигналы с выходов электрогидроусилителей 20 и 21 поступают на левый 10 и правый 11 гидроцилиндры соответственно. Гидроцилиндры 10 и 11, жест5 ко связанные с рабочим органом 1 автогрейдера, начинают перемещать последний в направлении, соответствующем уменьщению отклонения его положения от заданного. После восстановления заданного положения
Q рабочего органа 1 автогрейдера сигналы на выходах электрогидроусилителей 20 и 21 обращаются в нуль, а гидроцилиндры 10 и 11 прекращают перемещение рабочего органа 1 автогрейдера.
Применение изобретения позволяет повы5 сить производительность дорожной машины за счет сокращения числа проходов, а также повысить быстродействие системы за счет реализации связи по возмущению без систематической ошибки.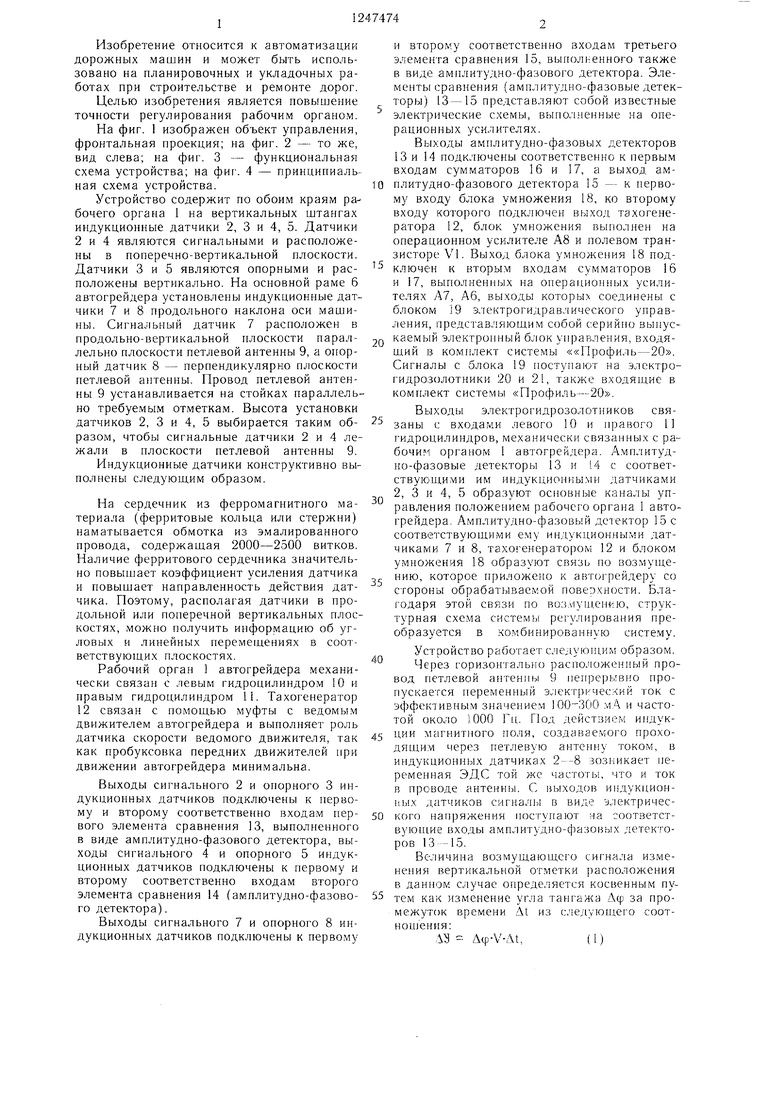
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления положением рабочего органа планировочной машины | 2002 |
|
RU2217554C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2006 |
|
RU2312399C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2009 |
|
RU2414004C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2011 |
|
RU2462759C1 |
| Устройство для определения амплитудно-фазового распределения поля антенны | 1990 |
|
SU1786453A1 |
| СИСТЕМА ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ЗЕМЛЕТРЯСЕНИЯХ И ЦУНАМИ | 2007 |
|
RU2349939C1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ СИГНАЛОВ С АМПЛИТУДНО-ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2002 |
|
RU2234816C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2009 |
|
RU2403623C1 |
| Способ определения координат инженерных металлических коммуникаций и устройство для его осуществления | 1986 |
|
SU1318957A1 |
vc Ч к
фиг.2
| Скловский А | |||
| А | |||
| Автоматизация дорожных машин | |||
| Рига | |||
| Автос, 1980 | |||
| Патент ФРГ № 1963491, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
