Изобретение относится к области торфяной промышленности, дорожного, транспортного строительства, сельского хозяйства и т.п.
Во многих технологических процессах возникает необходимость в придании обрабатываемой поверхности выпуклой формы с определенным радиусом кривизны. Например, в процессе торфодобычи эту выпуклую форму придают поверхностям технологических площадок - карт, в дорожном строительстве - полотну проезжей части дороги и т.д. Эта операция производится с помощью планировочных машин путем установки планировочного органа на каждом новом проходе по ширине обрабатываемой поверхности в соответствующее положение с помощью автоматических устройств рабочего органа.
Известно устройство управления, включающее ручные задатчики для системы стабилизации углового и высотного положения рабочего органа в зависимости от величины смещения при проходе машин по ширине обрабатываемой поверхности (Скловский А.А. Автоматизация дорожных машин. - Рига: Авотс, 1975, с.330-331).
Недостатком этого устройства является то, что каждая величина задания соответствует строго определенной величине смещения машины по ширине обрабатываемой поверхности, а это, в свою очередь, приводит к необходимости стабилизации курсовой направленности машины, значительно снижает ее маневренность, а следовательно, и производительность. С другой стороны, на каждом новом проходе водитель должен вручную устанавливать с помощью ручного задатчика величину задания для системы высотной и угловой стабилизации положения рабочего органа, что также связано с потерей производительности.
Наиболее близким техническим решением является устройство для регулирования положения рабочего органа дорожной машины (SU № 1247474, кл. Е 02 F 3/84, 9/20, 1986). Данное устройство содержит сигнальный и опорный датчики, расположенные перпендикулярно друг другу и смонтированные на рабочем органе и раме машины, петлевую антенну с магнитным полем, включающим множество эквипотенциальных поверхностей, установленную по бокам обрабатываемой поверхности, и блок управления. Два сигнальных и два опорных индукционных датчика смонтированы на рабочем органе по его краям. Сигнальные датчики расположены в поперечно-вертикальной плоскости, опорные датчики - в вертикальной плоскости. На основной раме автогрейдера установлены два индукционных датчика продольного наклона оси машины. Сигнальный датчик расположен в продольно-вертикальной плоскости параллельно плоскости петлевой антенны, а опорный датчик перпендикулярно плоскости петлевой антенны. Провод петлевой антенны установлен на стойках параллельно требуемым отметкам. Высота установки датчиков выбирается таким образом, чтобы сигнальные датчики лежали в плоскости петлевой антенны.
Недостаток известного устройства заключается в сложности его эксплуатации при профилировании поверхности, отличной от горизонтальной (т.е. выпуклой), из-за необходимости переустановки сигнальных датчиков в новое положение при каждом проходе устройства.
Задачей создания изобретения является упрощение и облегчение работы устройства при планировании выпуклой поверхности и, как следствие, повышение производительности за счет уменьшения количества проходов при работе в автоматическом режиме.
Технический результат - создание устройства управления рабочего органа планировочной машины, позволяющего в автоматическом режиме осуществлять планировку выпуклой поверхности заданного значения.
Поставленная задача достигается тем, что в устройстве управления положением рабочего органа планировочной машины, содержащем сигнальные и опорные датчики, расположенные перпендикулярно друг к другу и смонтированные на рабочем органе, петлевую антенну, установленную по бокам обрабатываемой поверхности, и блок управления, согласно изобретению сигнальные датчики установлены на рабочем органе по касательной к одной из эквипотенциальной поверхностей, формируемой петлевой антенной и соответствующей условию эквидистантности поперечному профилю обрабатываемой поверхности. Сигнальные датчики установлены на рабочем органе под углом от 0 до 2° к горизонтали рабочего органа. Ширина петлевой антенны определяется заданной выпуклостью обрабатываемой поверхности.
При таком взаимном расположении петлевой антенны и сигнальных датчиков возможна обработка поверхности без вмешательства водителя на каждом проходе при многократном смещении планировочной машины по ширине обрабатываемой поверхности в пределах ширины петлевой антенны. Преимущественная ширина обрабатываемой поверхности на торфяных полях, а также при строительстве дорог составляет от 20 до 40 м, а высота в выпуклой части профилируемой поверхности составляет от 0,5 до 2,5 м. Экспериментально выбрана величина угла установки сигнальных датчиков, смонтированных на рабочем органе. Если угол установки сигнальных датчиков будет меньше 0°, то профиль обрабатываемой поверхность будет получаться вогнутый, а при установке сигнальных датчиков под углом больше чем 2° - профиль поверхности будет больше допустимого значения выпуклости.
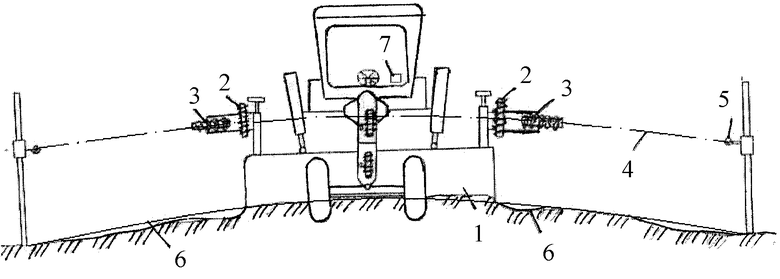
Сущность предлагаемого устройства поясняется чертежом, где изображена схема устройства управления положением рабочего органа планировочной машины.
Устройство содержит рабочий орган 1, на котором по обе его стороны установлены опорные датчики 2 и перпендикулярно им сигнальные датчики 3. В свою очередь, сигнальные датчики 3 смонтированы под углом от 0 до 2° к горизонтали рабочего органа 1. Углы установки сигнальных датчиков 3 корректируют по одной из эквипотенциальной поверхности 4, которая представляет собой окружность, проходящую через двухпроводную линию, образованную проводниками петлевой антенны 5, установленной по бокам профилируемой обрабатываемой поверхности 6. Из всего множества эквипотенциальных поверхностей 4 выбирают ту, которая соответствует планируемой проектной поверхности 6, а сигнальные датчики 3 устанавливают по касательной к этой одной выбранной эквипотенциальной поверхности 4 при условии ее эквидистантности проектной поверхности 6 поперечного ее профиля. Устройство содержит блок управления 7 для обработки сигналов датчиков и формировки сигналов управления.
Устройство работает следующим образом.
Первоначально осуществляют установку сигнальных датчиков 3 на опытной площадке с помощью нивелира по касательной к одной из эквипотенциальных поверхностей 4, формируемых магнитным полем петлевой антенны 5.
Последовательность настройки на заданную эквипотенциальную поверхность следующая.
На тарировочной площадке петлевую антенну 5 устанавливают в горизонтальной плоскости с помощью нивелира, а также устанавливают оси сигнальных датчиков 3 в эту же плоскость, используя механизмы изменения высоты установки сигнальных датчиков 3.
Далее перемещают планировочную машину в центр площадки так, чтобы сигнальные датчики 3 располагались симметрично относительно центра петлевой антенны 5. После чего перемещают с помощью механизма подъема рабочий орган 1 совместно с сигнальными датчиками 3 на высоту превышения середины обрабатываемой поверхности 6 относительно ее краев в соответствии с требуемой выпуклостью и устанавливают параллельно плоскости петлевой антенны 5. Затем изменяют угловое положение сигнальных датчиков 3, настраивая их таким образом, чтобы продольная ось сигнальных датчиков 3 была перпендикулярна вектору напряженности электромагнитного поля петлевой антенны 5. В этом случае сигнал с выхода датчиков 3 будет равен нулю. Соответствующее положение датчиков 3 определятся с помощью измерительного прибора или нуль-индикатора и фиксируется.
Эквидистантность обрабатываемой поверхности 6 выбранной эквипотенциальной поверхности 4 обеспечивается высотой установки сигнальных датчиков 3 на рабочем органе 1 с помощью механизма регулировки высоты установки сигнальных датчиков 3.
Угловые параметры установки сигнальных датчиков 3 определяются расстояниями между их центрами, шириной петлевой антенны 5, определяемой шириной дорожного полотна, и требуемой выпуклостью эквидистантной поверхности 6.
На рабочем органе 1 с опорными датчиками 2 укрепляют сигнальные датчики 3 по касательной к эквипотенциальной поверхности 4. При смещении вверх или вниз рабочего органа 1 относительно эквипотенциальной поверхности 4 с сигнального датчика 3 снимается сигнал, несущий информацию о величине и направлении перемещения рабочего органа 1, блок управления 7 формирует сигнал и передает его на рабочий орган 1, который проводит планировку проектируемой поверхности 6 по заданному профилю.
По сравнению с прототипом преимущество данного устройства выражается в отсутствии ручных операций по настройке систем автоматической стабилизации угловой и высотной координат на каждом новом проходе в соответствии с программой изменения этих координат, обеспечивающей выпуклость обрабатываемой поверхности с требуемым радиусом кривизны.
Устройство реализовано на базе серийной системы автоматического регулирования положения рабочего органа автогрейдера "Профиль-30". Испытания устройства показали высокие результаты, удобство в работе и точность в проведении профилирования поверхности и тем самым подтвердили ее работоспособность по предлагаемой схеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования положения рабочего органа дорожной машины | 1985 |
|
SU1247474A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ С ПОМОЩЬЮ СПУТНИКОВЫХ СИСТЕМ НАВИГАЦИИ GPS/ГЛОНАСС ИЛИ СВЕТОВЫХ, НАПРИМЕР ЛАЗЕРНЫХ, ИЗЛУЧАТЕЛЕЙ | 2011 |
|
RU2465410C1 |
| СПОСОБ ПЛАНИРОВКИ ЗЕМЕЛЬ | 2017 |
|
RU2689467C1 |
| СПОСОБ ПЛАНИРОВКИ ОРАШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 2001 |
|
RU2240681C2 |
| Система автоматической стабилизации поперечного наклона рабочего органа автогрейдера | 1986 |
|
SU1481344A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ | 2014 |
|
RU2566153C1 |
| Система автоматической стабилизации поперечного наклона рабочего органа землеройной машины | 1980 |
|
SU899808A1 |
| СПОСОБ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВКИ ОРОШАЕМЫХ ЗЕМЕЛЬ | 1997 |
|
RU2131664C1 |
| Машина для ремонта дорожных покрытий | 1982 |
|
SU1044721A1 |
| Планировщик | 1990 |
|
SU1768718A1 |
Изобретение относится к области торфяной промышленности, дорожного, транспортного строительства, сельского хозяйства и т.п. Техническим результатом изобретения является повышение точности профилирования путем осуществления планировки выпуклой поверхности заданного значения планировочной машиной в автоматическом режиме в соответствии с программой изменения угловой и высотной координат на каждом новом проходе. Устройство содержит сигнальный и опорный датчики, расположенные перпендикулярно друг к другу и смонтированные на рабочем органе, петлевую антенну, установленную на обрабатываемой поверхности, и блок управления. При этом сигнальные датчики смонтированы на рабочем органе и установлены по касательной к одной из эквипотенциальных линий, формируемой петлевой антенной и соответствующей условию эквидистантности поперечному профилю обрабатываемой поверхности. Преимущественно сигнальные датчики установлены на рабочем органе под углом от 0 до 2° к горизонтали рабочего органа, а ширина петлевой антенны определяется заданной выпуклостью обрабатываемой поверхности. 2 з.п. ф-лы, 1 ил.
| Устройство для регулирования положения рабочего органа дорожной машины | 1985 |
|
SU1247474A1 |
| Автоматизация дорожных машин, “АВОТС”, Рига, 1975, с.330-331. | |||

