1
Изобретение относится к автоматическому управлении) производственными процессами, может быть применено в цифровых программно-управляемых системах позиционирования различных перемещающихся объектов и является усовершенствованием известного устройства по авт, св. № 1149220.
Целью изобретения является расширение области применения и повьш1ения надежности.
Сущность изобретения состоит в расширении области применения и по- вьшении надежности устройства путем: автоматического управления обрезанием заготовки после того, как пройден ею остаток пути становится меньш допустимой величины; осуществления механического торможения заготовки перед обрезанием в соответствии с заданной программой, что улучшает точность резки; организации контроля работоспособности цепи обратной связи и снижения на этой основе уменьшения вероятности возникновения аварийной ситуации.
Введение блока управления торможением и его связей позволяет осуществлять механическое торможение заготовки в соответствии с заданной программой.
Введе ше блока определения зоны допуска и связей, им обусловлен1тых5 обеспечивает программное управление приводом ножниц и таким образом возможность обреза1шя заготовки после того 5 как пройденньш ею путь отличается от заданного пути на допустимую вёличи гу.
Введение счетчика контроля и его связей позволяет отсчитывать интервал времени, в течение которого отсутствуют импульсы от датчика перемещения, и формировать сигнал отказа при переполнении счетчика.
Введение злемента И и его связей обеспечивает блокировку подачи им- пуль сов от датчика перемещения после того, как остаток пути отработки становится меньшим определенного зна чения.
Введение триггера отказа и связей им обусловленных, позволяет запоминать сигнал отказа и производить отключение привода электродвигателя.
На фиг, приведена функциональная схема-цифрового устройства для программного управленияj на фиг.2-5 - функциональные схемы формирователя
0 2
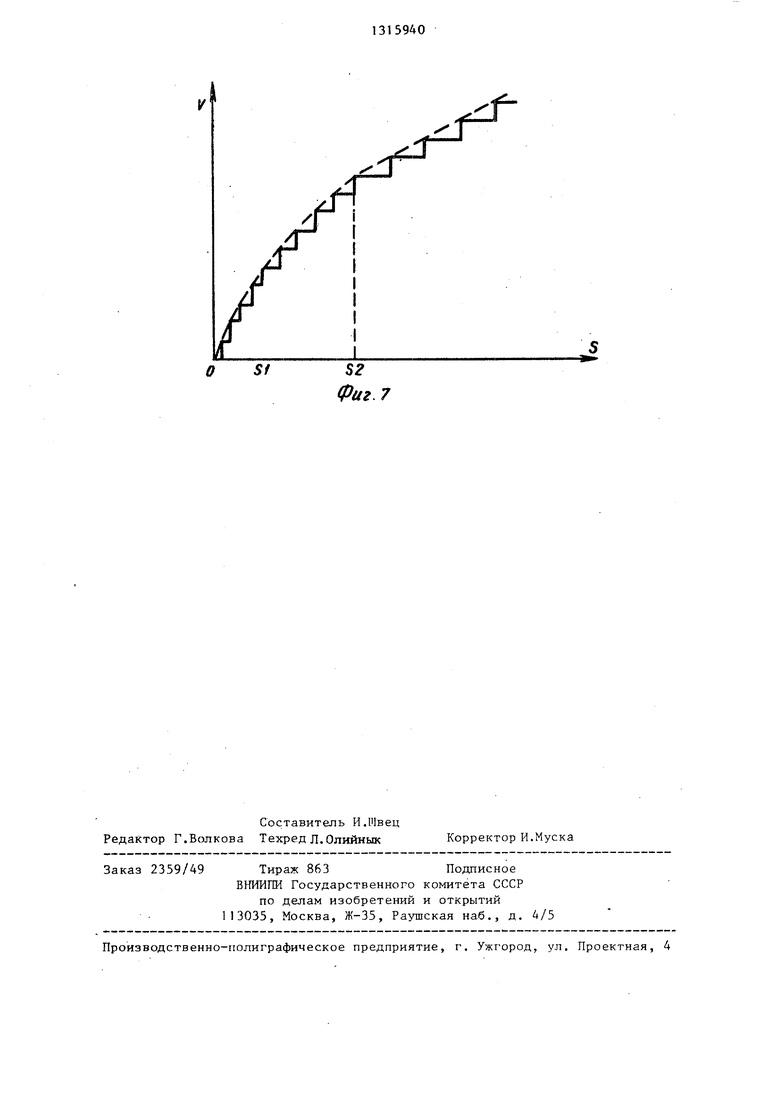
импульсов, блока управления торможением, блока определения зоны допуска и привода ножниц соответственно на фиг.6 - временная диаграмма работы устройства; на фиг.7 - график зависимости амплитуды аналогового сигнала А на выходе преобразователя код - аналог от рассогласования по перемещению S, пропор1и1о нальному
разности числа задающих импульсов и числа импульсов обратной связи.
Цифровое устройство для программного управления (фиг.) содержит блок 1 задания программы, формирователь 2 импульсов, сумматор 3, дешифратор 4, делители 5-10, первые 11-13 и вторые 14-16 элементы И, элемент И 17, первый 18 и второй 19 элементы ИЛИ, реверсивный счетчик 20
и счетчик 21 контроля, триггер 22 отказа, блоки управления торможением 23 и определения зоны допуска 24 перемещения, преобразователь код - анало г 25, усилитель 26, привод 27
ножниц, электромагнит 28 тормозных колодок, привод 29 валковой подачи, датчик 30 перемещения. Кроме того, символами 31.1 и 31.2 обозначены верхний и нижний ролики валковой подачи, символами 32.1 и 32.2 - верхняя и нижняя ножевые балки ножниц, символом 33 - заготовка, а символами 34, 35.1 и - первый - третий выходы формирователя 2 импульсов.
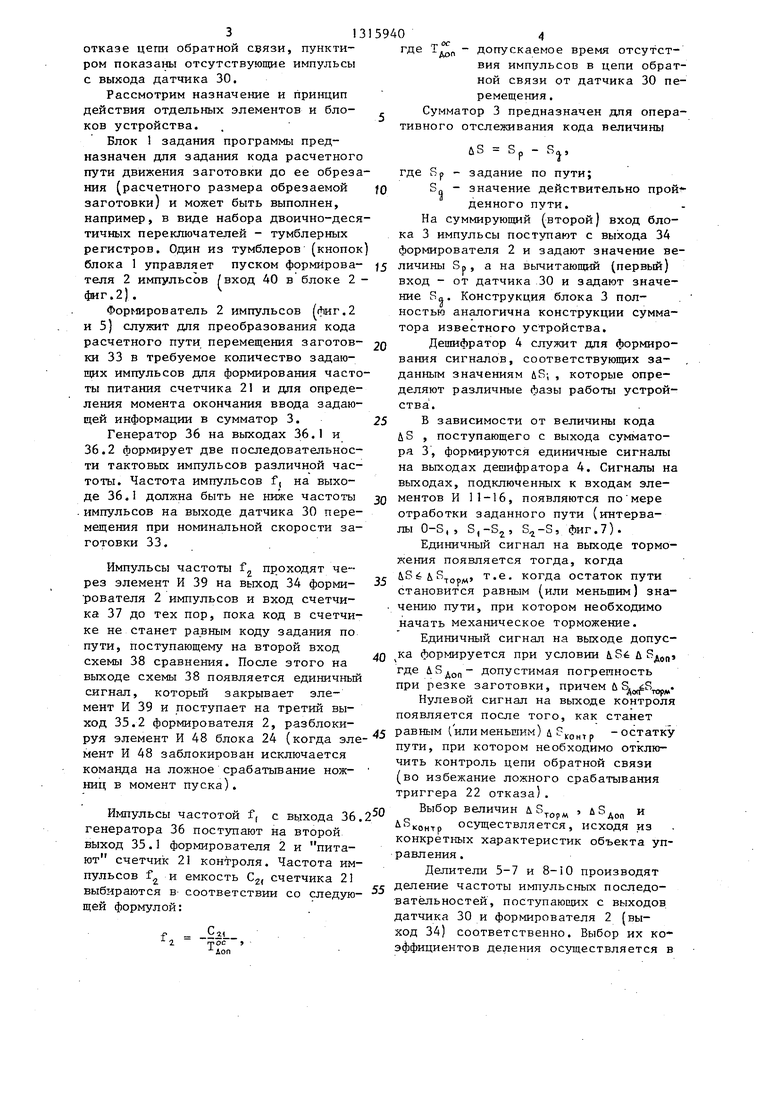
Формирователь 2 имульсов (фиг.2) содержит генератор 36 импульсов, счетчик 37, схему 38 сравнения, элемент И 39 и вход 40 включения генератора 36.
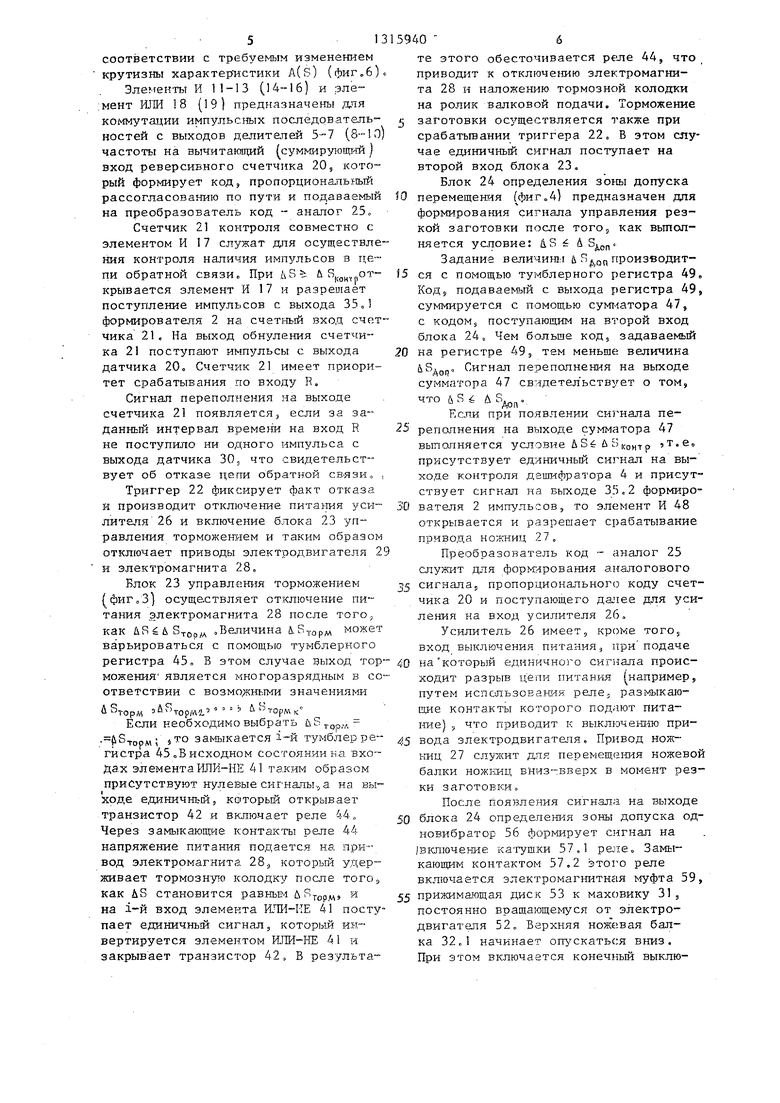
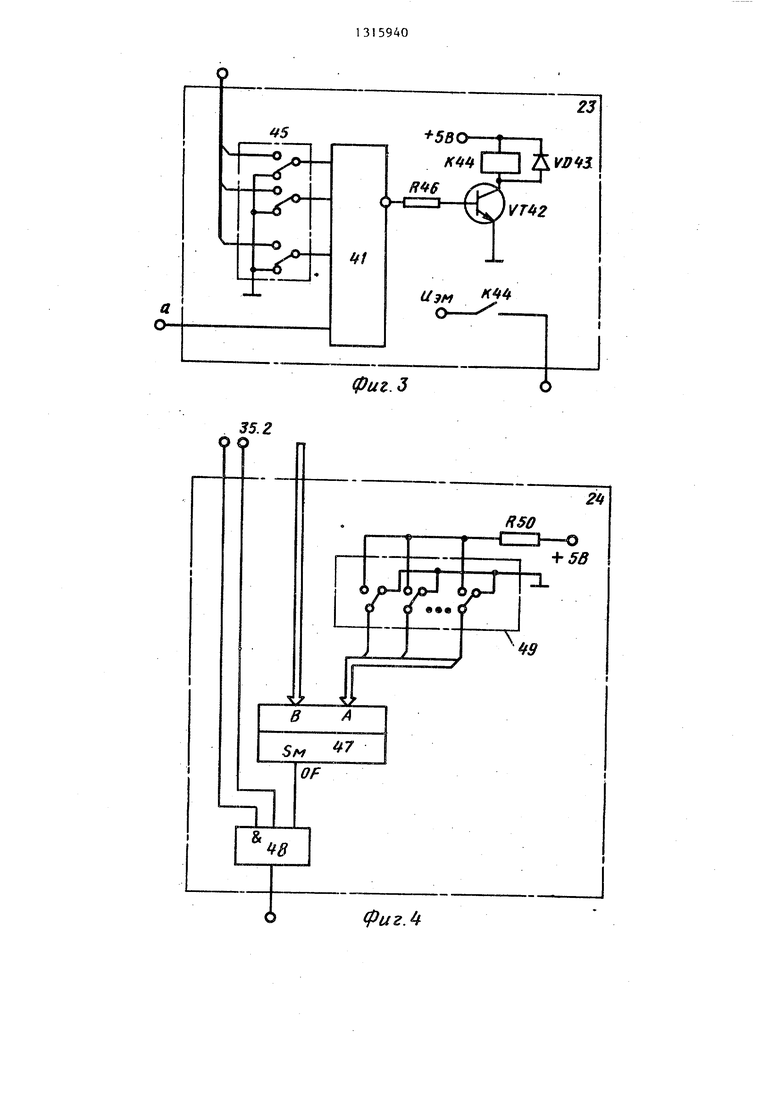
Блок 23 управления торможением (фиг.З) содержит элемент ИЛИ-НЕ 41, транзистор 42, диод 43, реле 44 , тумблерный регистр 45 и резистор 46. Блок 24 определения зоны допуска
перемещения (фиг.4) содержит комбинационный сумматор 47, элемент И 48, тумблерный регистр 49 и резистор 50. Привод ножниц 27 содержит маховик 51, постоянно вращающийся от
электродвигателя 52, прижимной
диск 53, шатун 54, ползун 55, с ко- торым связана верхняя ножевая балка 32.1, одновибратор 56, реле 57, конечный вы1слючатель 58 и электромагнитную муфту 59.
На фиг.ба показана временная диаграмма работы формировател я импульсов, на фиг.66 - временная диаграмма работы средств контроля устройства при
отказе цепи обратной связи, пунктиром показаны отсутствующие импульсы с выхода датчика 30,
Рассмотрим назначение и принцип действия отдельных элементов и блоков устройства.
Блок 1 задания программы предназначен для задания кода расчетного пути движения заготовки до ее обрезания (расчетного размера обрезаемой заготовки) и может быть выполнен, например, в виде набора двоично-десятичных переключателей - тумблерных регистров. Один из тумблеров (кнопок)
где Тдр„ - допускаемое время отсутствия импульсов в цепи обратной связи от датчика 30 перемещения ,
Сумматор 3 предназначен дпя оперативного отслеживания кода величины
uS - S р - Вл,
где
Ю
SP - с задание по пути;
значение действительно прой
денного пути.
На суммирующий (второй) вход блока 3 импульсы поступают с выхода ЗА формирователя 2 и задают значение веблока 1 управляет пуском формирова- 5 личины Sp, а на вычитающий (первый) теля 2 импульсов f вход 40 в блоке 2 - вход - от датчика 30 и задают значение Sa. Конструкция блока 3 полйностью аналогична конструкции суммафиг,2) ,
Формирователь 2 импульсов (фиг,2 и 5) служит дпя преобразования кода расчетного пути перемещения заготов- 20 Дешифратор 4 служит для формиро- ки 33 в требуемое количество задаю- вания сигналов, соответствующих затора известного устройства.
щих импульсов для формирования частоты питания счетчика 21 и для определения момента окончания ввода задающей информации в сумматор 3,
Генератор 36 на выходах 36,1 и 36,2 формирует две последовательности тактовых импульсов различной частоты. Частота импульсов f, на выходе 36,1 должна быть не ниже частоты .импульсов на выходе датчика 30 перемещения при номинальной скорости заготовки 33,
Импульсы частоты f проходят через элемент И 39 на выход 34 формирователя 2 импульсов и вход счетчика 37 до тех пор, пока код в счетчике не станет равным коду задания по пути, поступающему на второй вход схемы 38 сравнения. После этого на выходе схемы 38 появляется единичный сигнал, который закрывает элемент И 39 и поступает на третий выход 35,2 формирователя 2, разблокируя элемент И 48 блока 24 (когда эле мент И 48 заблокирован исключается команда на ложное срабатывание ножниц в момент пуска),
Импульсы частотой f, с выхода 36,2 генератора 36 поступают на второй выход 35,1 формирователя 2 и питают счетчик 21 контроля. Частота имДелители 5-7 и 8-10 производят
пульсов f и емкость С,, счетчика 21 выбираются в. соответствии со следую- 5 частоты импульсньпс последо- щей формулой: вательностеи, поступающих с выходов
датчика 30 и формирователя 2 (,ход 34) соответственно. Выбор их коТ°д„ . эффициентов деления осуществляется в
2
где Тдр„ - допускаемое время отсутствия импульсов в цепи обратной связи от датчика 30 перемещения ,
Сумматор 3 предназначен дпя оперативного отслеживания кода величины
uS - S р - Вл,
где
SP - с задание по пути;
значение действительно прой
денного пути.
На суммирующий (второй) вход блока 3 импульсы поступают с выхода ЗА формирователя 2 и задают значение ве Дешифратор 4 служит для вания сигналов, соответствую
тора известного устройства.
25
зо
35
данным значениям л8; , которые определяют различные фазы работы устройства ,
В зависимости от величины кода uS , поступающего с выхода сумматора 3, формируются единичные сигналы на выходах дешифратора 4, Сигналы на выходах, подключенных к входам элементов И 11-16, появляются по мере отработки заданного пути (интервалы 0-S,, S,-Sj, , Фиг,7),
Единичный сигнал на выходе торможения появляется тогда, когда &S &S
ТОрМ
т,е. когда остаток пути
/1
становится равным (или меньшим зна. чению пути, при котором необходимо начать механическое торможение.
Единичный сигнал на выходе допус- 40 ка формируется при условии S6 Л , где допустимая погрешность при резке заготовки, причем и S.S, Нулевой сигнал на выходе контроля появляется после того, как станет 45 равным (илименьшим) -остатку пути, при котором необходимо отключить контроль цепи обратной связи (во избежание ложного срабатывания триггера 22 отказа), 50 Выбор величин . л5,„„ и
iS
контр осуществляется, исходя из конкретных характеристик объекта управления ,
Делители 5-7 и 8-10 производят
5 частоты импульсньпс последо- вательностеи, поступающих с выходов
соответствии с требуемым изменением крутизны характеристики A(S) (фиг„6).
Элементе И 11-13 (14-16) и эле- мент ИЛИ 18 (19) предназначены для коммутации импульсных последовательностей с выходов делите,пей 5-7 (8-10) частоты на вычитаклдий (суммирующий) вход реверсивного счетчика 20, который формирует код, пропорциональный рассогласованию по пути и подаваемый на преобразователь код - аналог 25„ Счетчик 21 контроля совместно с элементом И 7 служат для осуществления контроля наличия импз льсов в цепи обратной связи При 5Ь Л RI,открывается элемент И 17 и paspeuiaeT поступление импульсов с выхода 35,1 формирователя 2 на счет) вход счетчика 21, На выход обнуления счетчика 21 поступают импульсы с выхода датчика 20 Счетчик 21 имеет приоритет срабатывания по входу R,
Сигнал переполнения на выходе счетчика 21 появляется, если за заданный интервал времени на вход R не поступило ни одного импульса с выхода датчика 30j что свидетельст25 реполнения на выходе сумматора А7 вьшапняется условие uSe-и аТ.е присутствует единичный сигнал на выходе контроля дешифратора 4 и присут™ ствует сигнал на выходе 35,2 формировует об отказе цепи обратной связи i
Триггер 22 фиксирует факт отказа и производит отключение питания усилителя 26 и включение блока 23 управления торможеш-jeM и таким образом отключает приводы электродвигателя 29 и электромагнита 28.
Блок 23 управления торможением (фиГсЗ) осуще-ствляет отключение питания электромагнита 28 после тогод как uReuS opM Величина й-Вторм может варьироваться с помощью тумблерного регистра 45 В этом случае зыход тор- 40 на который единичного сигнала проис- можения является многоразрядным в со- ходит разрыв цепи питания (например, ответствии с возможными значениями путем использования реле, размыкаю- А тоолл тлом л ° ° йВ-гормк пще контакты которого подают пита35
вателя 2 импульсов, то элемент И 48 открывается и разрешает срабатывание привода ножниц 27,
Преобразователь код аналог 25 служит .для формирования аналогового сигнала; пропорционального коду счетчика 20 и поступающего далее для усиления на вход усилителя 26,
Усилитель 26 имеет, кроме того вход выключения питания, при подаче
-торм тормг U R-ropw к Если необходимо выбрать ь
л я
.(18т.ор„; 5 ТО замыкается 1-й тумблер регистра 45 „В исходном состоянии ка входах элемента IfflK-HE 41 таким образом присутствуют н-улевые сигналы., а на выходе е.циннчный 5 кстторьш открывает транзистор 42 и включает реле 44., Через замыкающ - е контакты реле 44 напряжение питания подается на привод электромагнита 28j который удерживает тормозн;ую колодку после того, как AS становится равным , и на 1-й вход элемента ИЛИ-ИЕ 41 поступает единичный сигнал, которыми инвертируется элементом ШШ-НЕ 41 и закрывает транзистор 42, В результа торл .пие) 5 что приводит к выключению при45 вода электродвигателя. Привод нож- 5-шц 27 служит для перемеш,(гния ножевой балки нож1гиц вниз-вверх в момент резки заготовки
После появления сигнала на выходе 50 блока 24 определения зоны допуска од- новибратор 56 формирует сигнал на /включение катушки 57.1 реле. Замыкающим контактом 57,2 :этого реле включается электромагнитная муфта 59, 55 прижимающая диск 53 к маховику 31, постоянно вращающемуся от электродвигателя 52„ Верхняя ножЕ вая балка 32,1 начинает опускаться вниз. При этом включается конечньй выклю
15940 -6
те этого обесточивается реле 44, что привод11т к отключению электромагнита 28 и наложению тормозной колодки на ролик валковой подачи. Торможение
5 заготовки осуществляется также при срабатьгаании триггера 22, В этом случае единичный сигнал поступает на второй вход блока 23,
Блок 24 определения зоны допуска
to перемещения (фиг„4) предназначен для формирования сигнала управления резкой заготовки после того как вьтол- няется условие: uS &
Задание величиш.- и , производит15 ся с помощью тумблерного регистра 49 KoAs подавае№ й с выхода регистра 49, суммируется с помощью сум1-1атора 47, с кодом, поступающим на второй вход блока 24, Чем больше код, задаваемый
20 на регистре 49э тем меньше величина
&S
Аор°
Сигнал переполнения на выходе сз мматора 47 свидетел ьствует о том,
что U R Л В
АОП° Если при появлении сигнала пе5 реполнения на выходе сумматора А7 вьшапняется условие uSe-и аТ.е присутствует единичный сигнал на выходе контроля дешифратора 4 и присут™ ствует сигнал на выходе 35,2 формиро0 на который единичного сигнала проис- ходит разрыв цепи питания (например, путем использования реле, размыкаю- пще контакты которого подают пита5
вателя 2 импульсов, то элемент И 48 открывается и разрешает срабатывание привода ножниц 27,
Преобразователь код аналог 25 служит .для формирования аналогового сигнала; пропорционального коду счетчика 20 и поступающего далее для усиления на вход усилителя 26,
Усилитель 26 имеет, кроме того вход выключения питания, при подаче
чатель 58.1, который своим замыкаю- щим контактом 58.2 удерживает электромагнитную муфту 59 на самоблокировке.
После возвращения ножевой балки 32.1 в (верхнее) положение (ножевая балка 32.1 возвращается в исходное положение после того, как маховик 51 сделает один оборот) отключаются конечный выключатель 53.1 и электромагнитная муфта 59.
Электромагнит 28 предназначен дл выполнения операции механического торможения путем наложения тормозной колодки на ролик валковой подачи. Конструкция и назначение блоков 29 и 30 аналогичны их использованию в известном устройстве.
Устройство работает следующим образом.
В исходном состоянии все элементы памяти обнулены (цепи установки в исходное состояние условно не показаны) . На тумблерных регистрах 45
и 49 переключатели установлены в по- 25 электромагнит 28, в результате чего
лозчение, соответствующее заданным.
Л торм;
Код величины S- подан с выхода блока 1 задания программы на вход схемы 38 сравнения формирователя 2.
После появления единичного сигнала на пгане АО начинае т работать генератор 36. С .выхода 36.1 этого генератора импульсы проходят на выход 34
формирователя 2 в количестве, пропор- эс ет блок 24 определения зоны допуска
циональном величине R
Р
Эти импульсы поступают затем в сумматор 3, который формирует код рассогласования по перемещению, пропорциональный разности числа задающих импульсов и числа импульсов, поступающих с датчика 30 перемещения.
Дешифратор 4 определяет участки рассогласования по перемещению, кокоторый воздействует на привод 27
ножевой балки 32.1, производящий обрезание заготовки.
Одновременно с рассмотренными 40 процессами осуществляется контроль
исправности цепи обратной связи (фиг.бб).
После того, как устройство войдет в-зону контроля, появляется единичторые должны быть отработаны при раз- 5 й сигнал на выходе контроля деличных коэффициентах усиления регулятора. В зависимости от выявленного участка в реверсивный счетчик 20 по каналам сложения и вычитания поступают задающие импульсы и импульсы - с датчика 30 с частотой, определенной делителями 5 и 8 (участок O-S , фиг,7), 6 и 9 (участок ) или 7 и 10 (участок ). Эти импульсы поступают далее через элементы И 11, 14, 12и 15 или И 13, 16 и элементы ИЛИ 18 и 19 соответственно. В результате цифровая информация на выходе реверсивного счетчика 20
будет кусочно-линейно зависима от цифровой информации на выходе сумматора 3. Эта информация подается на преобразователь код - аналог 25 и
через усилитель 26 поступает на электропривод.29.
Привод 29 представляет собой последовательно соединенные усилитель- но-преббразовательный каскад (например, тиристорный преобразователь, электромашинный усилитель, магнитный усилитель и т.д.) и двигатель постоянного тока, вал которого механически связаны с датчиком 30 и роликом 31.1 валковой машины.
Информация с датчика 30 перемещения в виде последовательности импульсов поступает на вычитающий вход сумматора 3, который формирует новый
код рассогласования по перемещению.
После того, как рассогласование. по перемещению bS становится меньше срабатывает блок 23 механического торможения, который отключает
тормозная колодка прижимается к ролику 31.1 (при этом момент сопротивления, приведенньй к валу электродвигателя, увеличивается, что приводит к увеличению точности отработки заготовки 33) .
Затем рассогласование по перемещению продолжает уменьшаться до величины Дйдоп 5после чего срабатыва-
который воздействует на привод 27
ножевой балки 32.1, производящий обрезание заготовки.
Одновременно с рассмотренными 40 процессами осуществляется контроль
исправности цепи обратной связи (фиг.бб).
После того, как устройство войдет в-зону контроля, появляется единич0
шифратора 4.и открывается элемент И 17. Импульсы с выхода 35.1 формирователя 2 поступают на счетный вход счетчика 21.
Если датчик работает исправно, то импульсы с его выхода периодически обнуляют счетчик 21 контроля и сиг- - нал переполнения не возникает. Если в цепи обратной связи происходит 5 отказ, то в счетчик 21 проходит число импульсов, которое превышает его емкость. В результате на выходе счетчика 21 появляется сигнал переполнения , которым устанавливается в единичное состояние триггер 22 отказа. Сигнал с выхода триггера 22 приводит к отключению усилителя 26 и включению блока 23 механического торможения , что приводит к останову элект- родвигателя, срабатыванию механического тормоза и исключает возможность возникновения аварийной ситуации, которая может привести к порче заготовки и травматизму обслуживаю- щего персонала в связи с большей скоростью перемещения заготовки.
Если средства контроля не срабатывают, тонтюсле обрезания заготовки и установки схемы в исходное состояние блок 1 задания программы инициирует очередной пуск устройства, которое работает по описанному выше алгоритму.
I
Формула изобретения
1, Цифровое устройство дня программного управления по авт. св. К 1149220, отличающееся тем, что, с целью расширения облас- ти применения и повьшения надежнос- THj в него введены блок управления торможением, блок определения зоны допуска перемещения, счетчик контроля, триггер отказа и элемент И, вы- ход Торможение дешифратора соединен с первым входом блока управления торможением, выход которого соединен с приводом электромагнита тормозных колодок, выход Допуск дешифратора, выход сумматора и третий выход форми рователя импульсов соединены соответственно с первым, вторым и с третьим входами блока определения зоны допуска перемещения,выход которого сое- динен с приводом ножниц,выход Контроль дешифратора и второй выход фор- ьмрователя соединены соответственно с первым и вторым входами элемента И выход которого соединен со счетным
0
5
0
3 ,„ „
35
входом счетчика.контроля, выход датчика перемещения подключен к установочному входу счетчика контроля, выход которого соединен с единичным входом триггера отказа, выход которого соединен с входом выключения усилителя и с вторым входом блока управления торможением.
2. Устройство по П.1, о т л и - ч щ е е с я тем, что блок управления торможением содержит элемент ИЛИ-lfE, транзистор, диод, реле, тумблерный регистр и резистор, причем первьй вход блока управления торможением через тумблерный регистр и второй вход этого блока соединены с соответствующими входами элемента ИЛИ-НЕ, выход которого через резистор соединен с базой транзистора, положительньЕЙ полюс источника питания транзистора соединен через параллельно включенные обмотку, реле и диод, коллектор и эмиттер транзистора с нулевым полюсом источника питания транзистора, положительный полюс источника питания электромагнита через замыкаюищй контакт реле соединен с выходом блока управления торможением,
Зо Устройство по п. 1, отличающееся тем, что блок определения зоны допуска содержит комби- |Национный сумматор, элемент И, регистр, причем первый и третий входы блока определения зоны допуска перемещения и выход переполнения комбинационного сумматора соедине- 1Ы соответственно с первым, вторым
и третьим входами элемента И, выход которого является выходом блока определения зоны зопуска перемещения, второй вход которого и выход тумблерного регистра соединены соответственно с первым и с вторым входами комбинационного сумматора, I 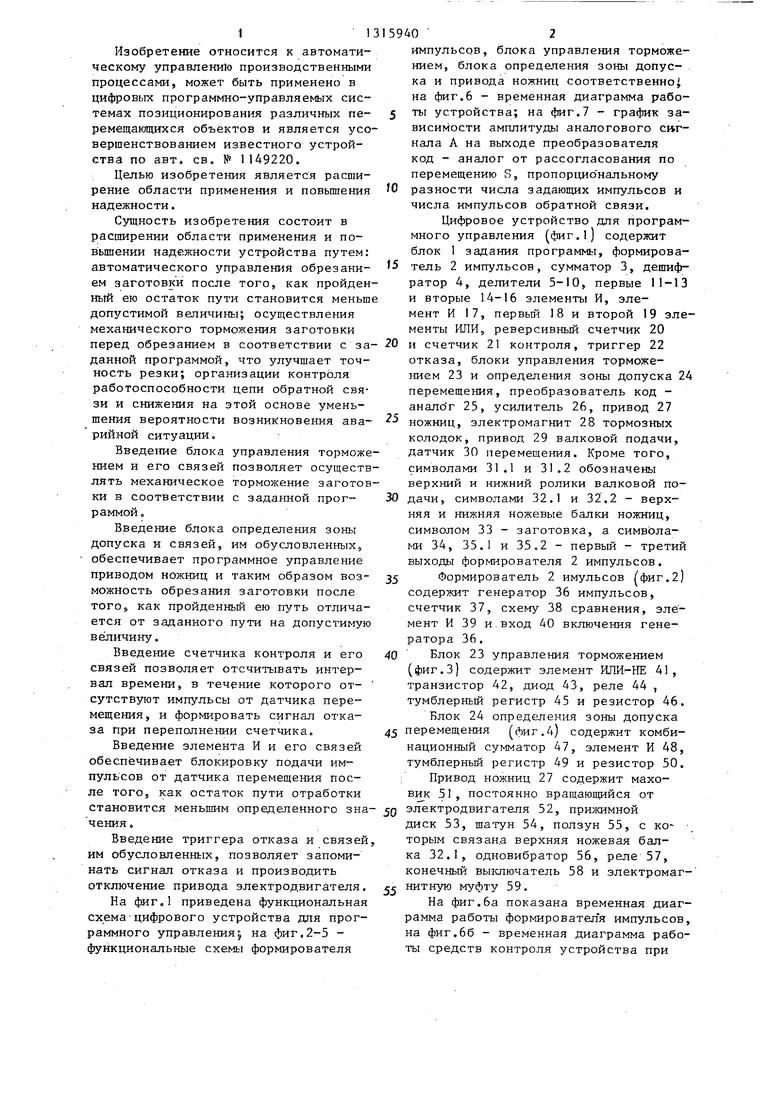


| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
| Система для программного управления | 1985 |
|
SU1325409A1 |
| Устройство для контроля микропроцессорной системы | 1985 |
|
SU1287161A1 |
| Устройство для контроля и резервирования информационно-измерительных систем | 1990 |
|
SU1716628A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Система для контроля и управления | 1985 |
|
SU1270767A1 |
| Устройство для автоматической проверки преобразователей аналогового сигнала в код | 1974 |
|
SU521591A1 |
| Устройство для микропрограммного управления и контроля | 1987 |
|
SU1497621A1 |
| Устройство для контроля и диагностики состояний объекта | 1989 |
|
SU1679468A1 |
| Система для контроля и управления | 1985 |
|
SU1273932A1 |

Изобретение относится к автоматическому управлению производственными процессами, может быть применено в цифровых программно-управляемых системах позиционирования различных перемещающихся объектов и является усовершенствованием известного устройства по авт. св. № 1149220. Цель изобретения - расширение области применения и повьшение надежности. В известное устройство дополнительно введены блок управления торможением, блок определения зоны допуска перемещения, счетчик контроля, триггер отказа и элемент И, что позволит обеспечить автоматическое управление обрезанием заготовки после того, как пройденный ею остаток пути: становится меньше допустимой величины, осуществить механическое торможение заготовки перед отрезанием в соответствии с заданной программой, что улучшает точность резки, организовать контроль работоспособности цепи обратной связи и снижение на этой основе вероятности возникновения аварийной ситуации. 2 з.п.ф-лы, 7 ил. § (Л с ы :о 4
w
36
rtf.
37
Фиг. 2
6з
6J5./
6 55.2
фиг.
ери г Л
--4-Л -
х
5г
v
/////////
X
X
и О
фиг. 5
Sf
8г
Фиг.7
Составитель И,Швец Редактор Г.Волкова Техред Л.Олийнык
2359/49
Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор И.Муска
| Цифровое устройство для программного управления | 1983 |
|
SU1149220A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
