Изобретение относится к робототехнике и может быть использовано при создании транспортных роботов.
Цель изобретения - повышение точности и расширение функциональных возможностей устройства за счет исключения нарастающей во времени ошибки гироскопа и режима обуче шя.
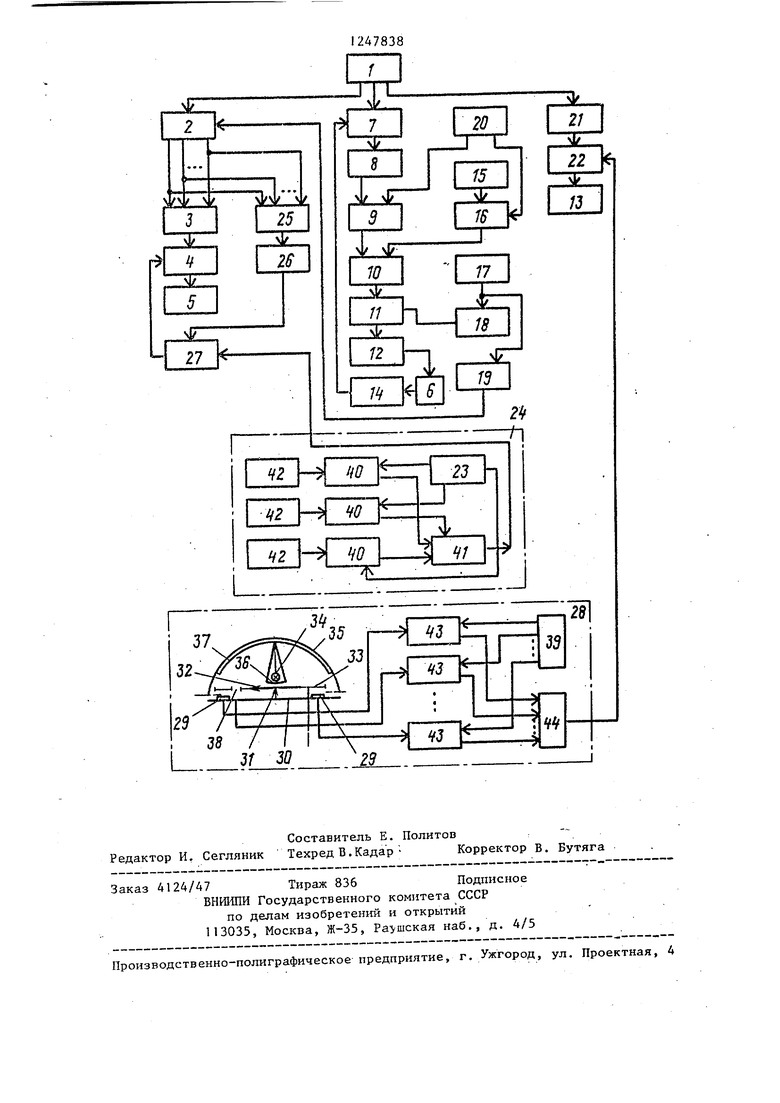
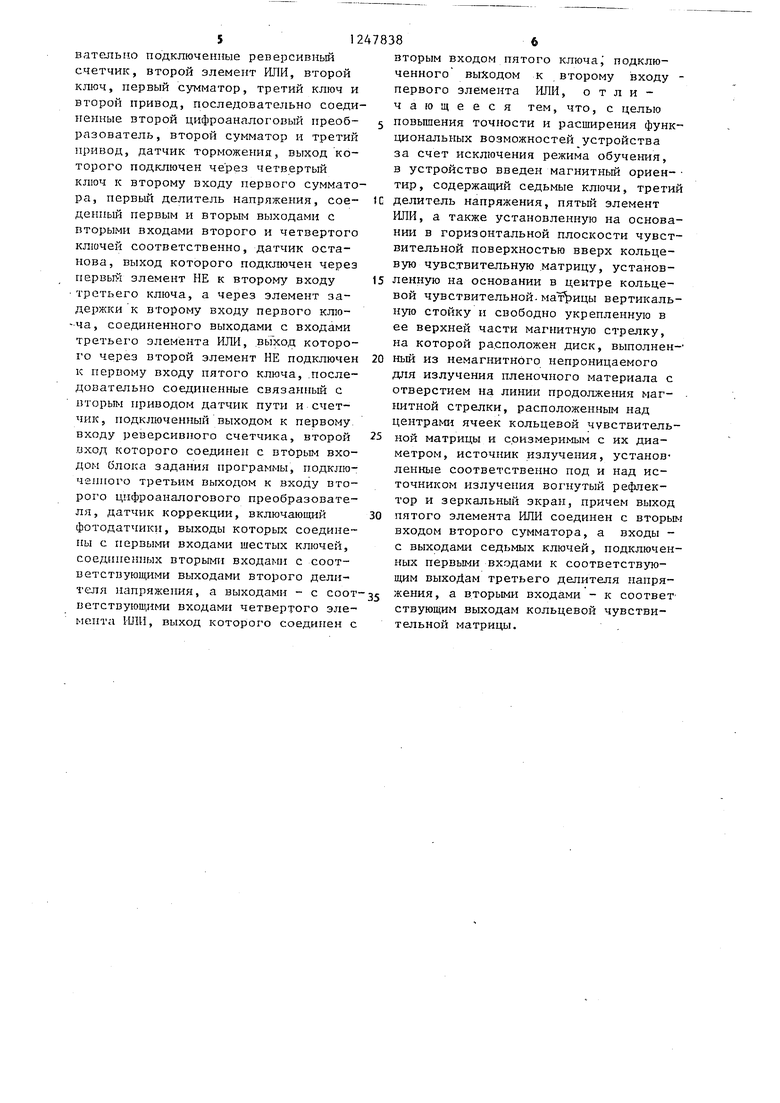
На чертеже представлена функциональная схема устройства.
Устройство содержит блок 1 задания программы, первый ключ 2, первый дифро-аналог.овьп- преобразователь 3, первый элемент ИЛИ 4, первый привод 5, датчик б пути, реверсивный счетчик 7, второй элемент ИЛИ 8,. второй ключ 9, нервьш сумматор 10, третий ключ 1, второй привод 12, третий привод 13, счетчик 14, датчик 15 то молч енпя, четвертый ключ 16, датчик 17 останова, первый элемент НЕ 18, элемент 19 задержки, первый делител 20 иап. яжепия, второй цифро-аналого Бы/ преобразователь 21, второй сум i-iarop 22, второй делитель 23 напряжения, датчик, 24 коррекции, третий : лемент ИЛИ 25, второй элемент НЕ 26, нлты ключ 27, магнитный ориентир 28, кольцевал чувствительная матрица 29, центр 30 кольцевой чув стиительности матрицы, вертикальная .стойгса 31, маг нитная стрелка 32, диск 33, источник 34 излучения, куполообразная крышка 35, вогнутый релектор 36, зеркальный экран 37, отверстие 38, третий делитель 39, пятые ключи 40, четвертый элемент .. lUni 41, фотоприемники 42, седьмые ключи 43, пятый элемент ИЛИ 44.
Устройство работает следующим образом.
Блок 1 задания программы со вторго выхода выдает в двоичном коде на реверсивный счетчик 7 число, равное расстояшш в метрах или сантиметрах на которое должен переместится робот, на вход счетчика 7. На вычитающий счетнь й вход счетчика 7 в тех же единицах поступают сигналы со счетчика 14 пути, действительно нройдепного роботом.
Пока число, ноступившее с блока 1 программ, больше числа импульсов, поступивших со счетчика 14 пут на вь Ходе реверсивного счетчика. 7 . будет действовать число, равное разности чисел в двоичном коде, и элемент ИПИ будет иметь на своем входе
5
0
5
0
5
0
5
0
55
определенное , а на выходе - логическую единицу, которая держит открытым ключ 9 для напряжения с делителя 20. Это напряжение проходит через ключ 9 на сумматор и далее через ключ 11 поступает на привод 12, приводящий в движение робот. Счетчик 14 пути считает пройденный путь и выдает его в виде импульсов на второй вход реверсивного счетчика 7..Когда робот пройдет заданное расстояние, на эиходах счетчика 7 образуется нулевой сигнал по всем разрядам, что приводит к нулю на .выходе элемента ИЛИ 8 и запираншо ключа 9 для напряжения с выхода делителя 20, Робот при этом остановился бы-, но для под- .готовки останова робот предварительно с помощью датчика 15 торможения переводится на малую скорость.
Лри срабатывании датчика 15 торможения его сигнал поступает на управ- , ЛЯЮ1ДИЙ вход ключа 16 и открывает его для напряжения, поступающего со второго выхода делителя 20. Б сумматоре 10 это папряжепие вычитается из напряжения, поступившего с выхода дшштеля 20, и на привод 12 перемещения ноступает таким образом напряжение, обеспечивающее замедление движения робота. Затем срабатывает датчик 17 останова, расположенный от датчика 15 то-рмолсения па расстоянии, равном пути .замедления робота до ползучей скорости и через элемент НЕ 18 запирает ключ И. Робот останавливается с достаточной точностью, так как останов его осуществляется при малой скорости. Если по какой-либо причине робот не останавливается (не сработали датчик 15
или 17), то он остановится, когда счетчик 14 пути вьщаст на второй вход реверсивного счетчика 7 заданное количество .импульсов . В этом случае счетчик 7 обнулится на всех своих выходах и ноль с выхода элемента ИЛИ 8 закроет ключ для напряжения с делителя 20. Робот останавливается. Эта ситуация считается аварийной, и требует вмешательства оператора. Нри нормальной работе.сигнал с датчика I7 останова робота через элемент 19 задержки (задержка необходима для того, чтобы робот успел за это время остановиться) поступает на управляющий вход ключа 2,который открывается для информации от блока I задания
программы, который подает по данному каналу информацию по управление приводным устройством линейного перемещения манипулятора, т.е. о величине его перемещения. Информация с ключа 2 в виде параллельного двоичного кода поступает параллельно на преобразователь 3 и элемент ИЛИ 25. После преобразования в преобразователе 3 напряжение поступает на элемент ИЛИ 4 и далее - на привод 5, перемещающи манипулятор в ли.нейном направлении.
Пока поступает информация с блока 1 элемент ИЛИ 25 имеет на выходе 1. По окончании программы на выхо- де элемента ШТИ 25 образуется О, а ,на выходе элемента НЕ 26 появляется 1, открывающая ключ 27 для напряжения, пропорционально ошибке останова робота, поступающего с датчи- ка 24 коррекции. Напряжение с датчика 24 коррекции в этом случае поступает на второй вход элемента ИЛИ 4 и далее - на привод 5 с целью перемещения манипулятора для компенсации ощибки останова робота.
При этом датчик 24 коррекции работает следующим образом. Ряд фотоприемников 42, расположенных на манипуляторе вдоль борта робо та так, что центр манипулятора робота находится между двумя ср едними приемниками 42, принимает сигналы от узконаправленного излучателя, обозначающего центр объекта обслужи- вания. При останове робота этот сигнал принимается одним из приемников 42, преобразуется в напряжение и поступает на один из ключей 40, который пропускает на выход напряжение, пос- тупающее на него с соответствующего выхода делителя 23. Это напряжение далее через элемент ИЛИ 41 поступает на выход датчика 24 коррекции.
Чем больше ошибка останова, тем дальше от центра находится срабатываемый приемник 42 и тем дольше идет отработка ошибки останова робота. Когда, линейно перемещаясь, вместе с манипулятором засветятся два цент- ральных фотоприемника 42, то на выходе датчика 24 коррекции будет действовать О, так как с делителя 23 на центральные ключи 40 поступает напряжение, равное нулю.
Для осуществления запрограммиро- ванного поворота робота на новый кур следования блок 1 выдает со своего
третьего выхода на преобразователь 21 кодовое значение нового курса следования робота в градусах. Преобразователь 21 преобразует этот код в напряжение,которое поступает на сумматор 22, где алгебраически складываются заданное и текущее значения курса робота, причем текущее значение поступает на магнитный ориентир 28. С выхода сумматора 22 напряжение поступает на привод I3 поворота робота, с помощью которого робот поворачивается до тех пор, пока существует раз ность между значениями заданного и текущего курсов робота.
Независимо от направления продольной горизонтальной оси робота острие магнитной стрелки 32, а значит и калиброванное отверстие 38 в диске 33 всегда направлено на магнитный север и если продольная ось робота в данный
XX г
момент также направлена на север, то через калиброванное отверстие 38 источником 34 излучения засвечивается ячейка матрицы 29, выходу которой присваивается нулевое значение. При изменении курса робота, например, влево, вместе с роботом поворачивается и основание ориентира 28, на котором жестко укреплена кольцевая чув- ствительная матрица 29. Магнитная стрелка 32, укрепленньй на ней диск 33 и отверстие 38 в диске 33 остаются направленными на север, т.е. световой зайчик перемещается по кольцевой матрице 29 слева направо, засвечивая поочередно расположенные по кольцу ячейки. Выходы .каждой ячейки соединены с управляющими входами ключей 43. На входы ключей 43 поступает напряжение с делителя 39, так что каждой ячейке соответствует свое напряжение, по этому признаку отличают ячейки на выходе ориентира 28. С выодов ключей 43 напряжения поступают на соответствующие входы элемента ЛИ 44, с его выхода - на выход магнитного ориентира 28 и далее - на вход сумматора 22.
ормула изобретения
Устройство для управления тран- спортным роботом, содержащее послеовательно соединенные блок задания
рограммы, первый ключ, первьй циф- оаналоговьш преобразователь, первый лемент ИЛИ и первый привод,последо
вателыю подключенные реверсивный счетчик, второй элемент ИЛИ, второй ключ, нервый сумматор, третий ключ и второй привод, последовательно соединенные второй цифроаналоговый преобразователь, второй сумматор и третий привод, датчик торможения, выход которого подключен через четвертый ключ к второму входу первого сумматора, первый делитель напряжения, сое- денпый первым и вторым выходами с вторыми входами второго и четвертого ключей соответственно, датчик останова, выход которого подключен через первый элемент НЕ к второму входу третьего ключа, а через элемент задержки к второму входу первого клю- -ча, соединенного выходами с входами третьех о элемента ИЛИ, выход которого через второй элемент НЕ подключен к первому входу пятого ключа, .последовательно соединенные связанный с вторым приводом датчик пути и счетчик, подключенный выходом к первому входу реверсивного счетчика, второй вход которого соединен с вторым входом блока задания программы, подключенного третьим выходом к входу второго цмфроаналогового преобразователя, датчик коррекции, включающий фотодатчики, выходы которых соединены с первыми входами шестых ключей, соединенных вторыми входами с соответствующими выходами второго делителя напряжения, а выходами - с соот ветствующими входами четвертого элемента Ш1И, выход которого соединен с
(С
15
-з5
478386
вторым входом пятого ключаj подключенного выходом к второму входу - первого элемента ИЛИ, отличающееся тем, что, с целью повышения точности и расширения функциональных возможностей устройства за счет исключения режима обучения, в устройство введен магнитньш ориен- тир, содержащий седьмые ключи, третий делитель напряжения, пятый элемент ИЛИ, а также установленную на основании в горизонтальной плоскости чувствительной поверхностью вверх кольцевую чувствительную матрицу, установленную на основании в центре кольцевой чувствительной.матрицы вертикальную стойку и свободно укрепленную в ее верхней части магнитную стрелку, на которой расположен диск, выполненный из немагнитного непроницаемого для излучения пленочного материала с отверстием на линии продолжения маг- . нитной стрелки, расположенным над центрам ячеек кольцевой чувствительной матрицы и соизмеримым с их диаметром, источник излучения, установленные соответственно под и над источником излучения вогнутый рефлектор и зеркальный экран, причем выход пятого элемента ИЛИ соединен с вторым входом второго сумматора, а входы - с выходами седьмых ключей, подключенных первыми входами к соответствующим выходам третьего делителя напряжения, а вторыми входами - к соответ ствующим выходам кольцевой чувствительной матрицы.
20
25
30
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВПРЫСКОМ ТОПЛИВА | 1992 |
|
RU2037064C1 |
| Устройство для вычисления массы нефти и нефтепродуктов в резервуарах | 1983 |
|
SU1117653A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Устройство для контурного управления промышленным роботом | 1984 |
|
SU1211691A1 |
| Самонастраивающееся устройство управления | 1983 |
|
SU1130830A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ РАЗБРОСА ПАРАМЕТРОВ ФОТОЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ МНОГОЭЛЕМЕНТНОГО ПРИЕМНИКА | 1992 |
|
RU2025905C1 |
| Устройство для программного управления приводом | 1984 |
|
SU1226410A1 |
| Цифровое устройство для программного управления | 1983 |
|
SU1149220A1 |
| Устройство для управления конвейером | 1982 |
|
SU1082714A1 |
| Калибратор периодических сигналов инфразвуковых частот | 1987 |
|
SU1449926A1 |
Изобретение относится к области робототехники и может быть использовано при создании необучаемых транспортных роботов. В устройстве за счет введения магнитного ориентира повьппается точность (за счет исключения гироскопического дрейфа) и расширяются функциональные возможности (за счет исключения режима обучения). 1 ил. ю 4 СХ) со 00
| Кунио Фуявара и др | |||
| Ненаправляемое роботное средство | |||
| Труды II Международного симпозиума по промьшшен- ным роботам | |||
| Токио, 1981, том I, с, 202-211, |
