оо ю
2. ст н1Йство по п. , отличающееся тем, ПО блок установки плоскости симметрии выполнен в виде двоично-десятичного счетчика, соединенного с дешифратором, переключателя задания положения плоскости симметрии, элементов ИЛИ-НЕ, И, инвертора, причем дешифратор через переключатель задания положения плоскости симметрии соединен с элементом ИЛИ-НЕ, выход которого является одним из выходов блока установки плоскости симметрии и соединен с одним из входов элемента И и входом инвертора, выход которого соединен с двоично-десятичным счетчиком, вторым выходом блока установки плоскости симметрии является один из входов элемента И, третьим - выход элемента И, а входами - входы двоично-десятичного счетчика.
3. Устройство по пп. 1 и 2, отличающееся тем, что блок управления выполнен в виде двух синхронных RS-триггеров, генератора единичного сигнала, одновибратора, элемента И и пусковой кнопки, причем одновибратор соединен с генератором единичного сигнала и одним из входов элемента И, выход которого соединен с первым RS-триггером, выход которого соединен с вторым RS-триггером и является первым выходом блока управления, вторым выходом блока управления является выход второго RS-триггера, одним из входов блока управления является один из входов элемента И, другим -- один из входов RS-триггера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для получения информации о положении груза на конвейере | 1982 |
|
SU1082713A1 |
| Устройство для формирования кодовых последовательностей | 1988 |
|
SU1554115A1 |
| Устройство для вычисления показателя экспоненциальной функции | 1986 |
|
SU1335990A1 |
| Устройство для вычисления показателя экспоненциальной функции | 1985 |
|
SU1270770A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| Устройство для вычисления показателя экспоненциальной функции | 1983 |
|
SU1129611A1 |
| Синтезатор интервалов времени | 1986 |
|
SU1406558A1 |
| Устройство для циклового программного управления | 1986 |
|
SU1381432A1 |
| Устройство для комплексной проверки автоматизированных систем ультразвукового контроля | 1987 |
|
SU1580248A1 |
| ПРОТИВОУГОННАЯ СИСТЕМА | 1995 |
|
RU2086437C1 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОНВЕЙЕРОМ, содержащее привод, датчик груза, генератор импульсов, соединенный с делителем частоты, и коммутатор частоты, причем датчик груза соединен с одним из входов коммутатора частоты, два других входа которого соединены с делителем частоты, отличающееся тем, что, с целью расширения его функциональных возможностей путем центрирования грузов переменной длины в произвольных точках конвейера, оно снабжено блоком установки плоскости симметрии, блоком управления, бло-ком центрирования и блоком пуска и останова конвейера, причем первый вход блока установки плоскости симметрии соединен с одним из выходов делителя частоты и одним из входов коммутатора частоты, второй вход соединен с одним из выходов блока управления и одним из входов блока центрирования, один выход которого соединен с третьим входом блока установки пло,скости симметрии, а другой - с одним из входов блока управления, один из выходов блока установки плоскости симметрии соединен с одним из входов блока центрирования и коммутатора частоты, выход которого соединен с одним из входов блока центрирования, один из входов блока управления соединен с датчиком груза и одним из входов блока (О центрирования, а один из входов блока управления соединен с блоком пуска и останова конвейера, выход которого соединен с приводом.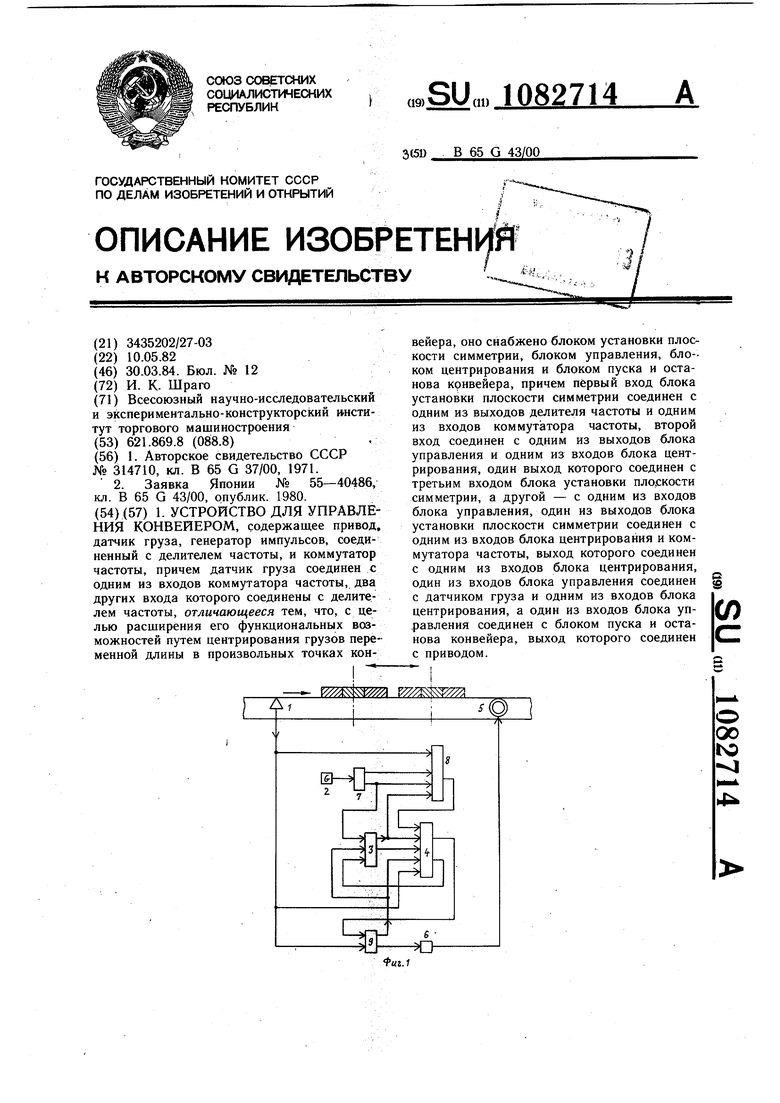
Устройство относится к автоматизации подъемно-транспортного оборудования.
Известно устройство для управления конвейером, содержащее датчики груза, логические схемы И и ИЛИ, реверсивный и суммирующий счетчики, сдвигающий регистр и регистратор, дающее информацию о положении грузов на конвейере 1.
Недостаток указанного устройства - отсутствие сигналов о центрировании грузов в направлении движения относительно произвольно заданной точки, что при переменной длине грузов не дает возможности останавливать их так, чтобы плоскость симметрии грузов совпадала с плоскостью симметрии перемещаемых грузозахватных устройств.
Известно также устройство для управлеНИН конвейером, содержащее привод, датчик груза, генератор импульсов, соединенный с делителем частоты, и коммутатор частот, причем датчик груза соединен с одним из входов коммутатора частоты, два других входа которого соединены с делителей частоты 2.
Недостатком известного устройства является то, что сигналы центрирования (симметричного расположения) грузов могут быть получены только при их положении в определенных точках и только косвенным образом (так как точки центрирования будут сдвинуты относительно указанных точек).
Это не позволяет использовать устройство для центрирования грузов переменной длины в направлении их перемещения от(тосительжз произвольно, заданной точки, что препятствует проведению дальнейших
технологических операции перемещения и переработки грузов.
Цель изобретения - расширение функционалЬных возможностей устройства путам центрирования грузов переменной длины в произвольных точках конвейера.
Ноставленная цель достигается тем, что устройство для управления конвейррм, содержащее привод, датчик груза, генератор
импульсов, соединенный с делителем частоты, и коммутатор частоты, причем датчик груза соединен с одним из входов коммутатора частоты, два других входа которого соединены с делителем частоты, снабжено
блоком установки плоскости симметрии, блоком управления, блоком центрирования и блоком пуска и останова конвейера, причем первый вход блока установки плоскости симметрии .соединен с одним из выходов делителя частоты и одним из входов коммутатора частоты, второй вход соединен с одним из выходов блока управления и одним из входов блока центрирования, один выход которого соединен с третьим входом блока установки плоскости симметрии, а другой -
с одни:м из входов блока управления, один из выходов блока установки плоскости симметрии соединен с одним из входов блока центрирования и коммутатора частоты, выход которого соединен с одним из входов блока центрирования, один из входов блока
управления соединен с датчиком груза и одним из входов блока центрирования, а один из входов блока управления соединен с блоком пуска и останова конвейера, выход которого соединен с приводом.
Блок установки плоскости симметрии
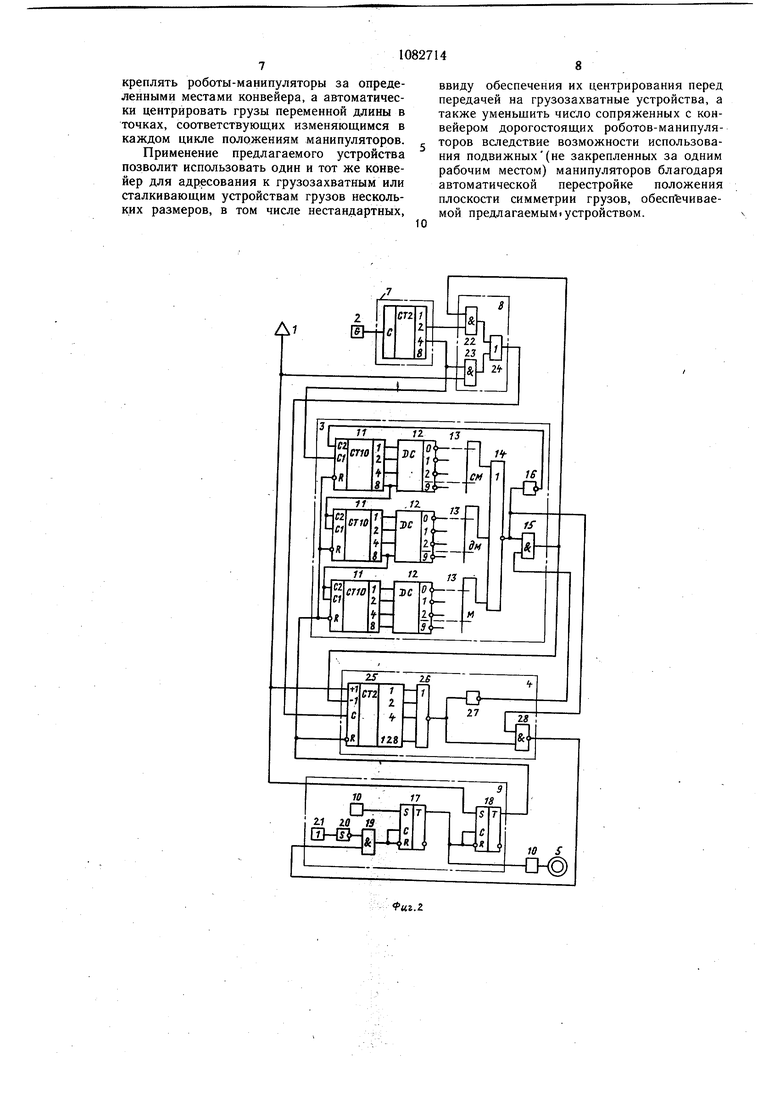
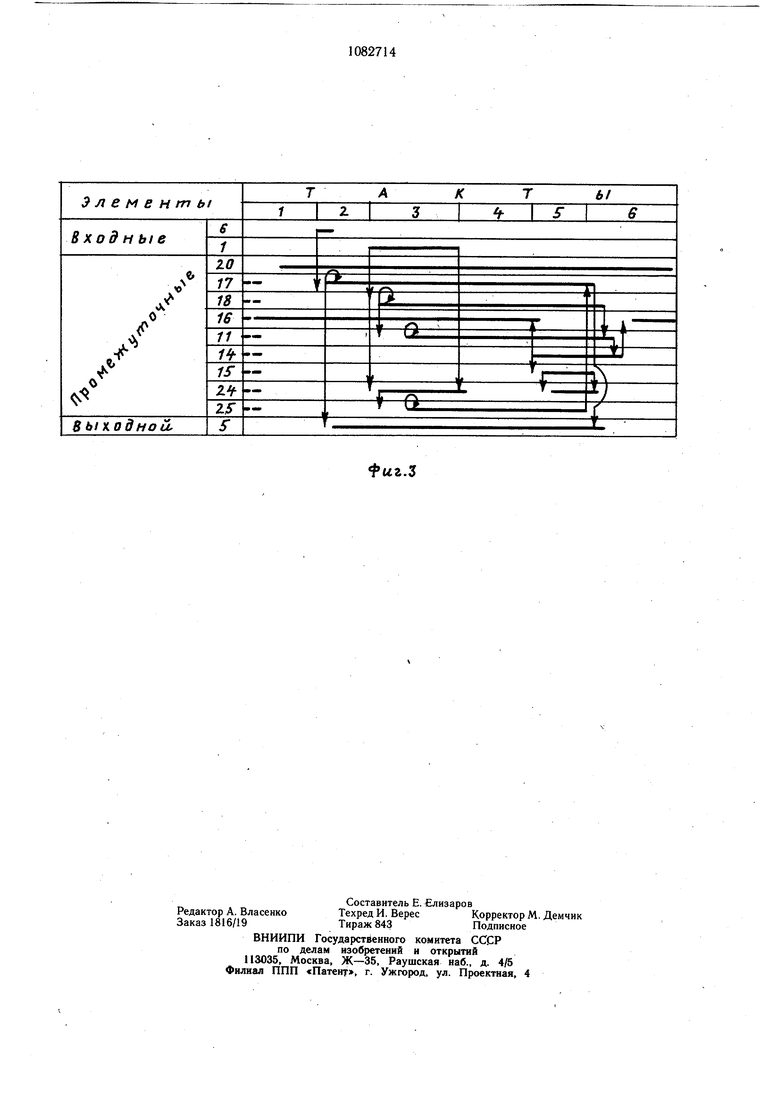
выполнен в виде двоично-десятИчного счетчика, соединенного с дешифратором, переключателя задания положения плоскости симметрии, элементов ИЛИ-НЕ, И,инвертора, причем дешифратор через переключатель задания положения плоскости симметрии соединен с элементом ИЛИ-НЕ, выход которого является одним из выходов блока установки плоскости симметрии и соединен с одним из входов элемента И и входом инвертора, выход которого соединен с двоичнодесятичным счетчиком, вторым выходом блока установки плоскости симметрии является один из входов элементами, третьим - выход элемента И, а входами - входы двоично-десятичного счетчика. Блок управления выполнен в виде двух синхронных RS-триггеров, генератора единичного сигнала, одновибратора, элемента И и пусковой кнопки, причем одновибратор соединен с генератором единичного сигнала и одним из входов элемента И, выход которого соединен с первым RS-триггером выход которого соединен с вторым RS-триггером и является первым выходом блока управления, вторым выходом блока управления является выход второго RS-триггера, одним из входов блока управления является один из входов элемента И, другим - один из входов RS-триггера. На фиг. 1 показана функциональная схема устройства и расположение грузов и датчика на конвейере; на фиг. 2 - функциональная схема входящих в устройство блоков; на фиг. 3 - график действия устройства. Устройство содержит датчик I груза на конвейере, генератор 2 импульсов, блок 3 установки плоскости симметрии и блок 4 центрирования, привод 5 конвейера, блок 6 пуска и останова конвейера, делитель 7 частоты, коммутатор 8 частот, блок 9 управления устройством, пусковую кнопку 10. Два выхода делителя 7 частоты соединены с входами коммутатора 8 частот а один из этих выходов (соответствующий меньшей частоте) также с входом блока 3 установки плоскости симметрии. Два выхода указанного блока соединены с входами блока 4 центрирования, а один из этих выходов также с входом коммутатора 8 частот, выход которого связан с блоком 4 центрирования. Выходы последнего соединены с входами блока 3 установки плоскости симметрии и блока 9 управления устройством, один из выходов которого соединен с входами блоков установки плоскости симметрии 3 и центрирования 4. Другой его выход подключен к входу блока 6, датчик соединен с входами коммутатора 8 частот, блоков 9 управления устройством и центрирования 4. Генератор 2 импульсов подключен к входу делителя 7 частоты, а привод 5 - к выходу пусковой кнопки преобразователя 10. На фиг. 1 и 2 показаны два случая центрирования грузов различной длины в заданных точках конвейера; стрелка показывает направление движения грузов; отрезок прямой со стрелками на обоих концах обозначает возможность произвольного перемещения задаваемой плоскости симметрии. Блок 3 установки плоскости симметрии содержит двоично-десятичный счетчик 11, связанный с дешифратором 12. Инверсные выходы каждого разряда дешифратора 12 соединены с неподвижными контактами соответствующих секций переключателя 13 задания положения плоскости симметрии. Подвижные контакты переключателя 13 соединены с входами элемента ИЛИ-НЕ 14, связанного с элементом И 15 и через инвертор 16 - с одним из счетных входов счетчика 11. Вход блока 3 установки плоскости симметрии, связанный с выходом делителя 8 частоты, соединен с другим счетным входом счетчика 11. Инверсный R-вход счетчика 11 соединен с входом блока 3, соединенным с выходом блока 9 управления устройством, а выходы элементов И 15 и ИЛИ-НЕ 14 - с выходами блока 3. Блок 9 управления устройством содержит два синхронных RS-триггера 17 и 18, прямой вход первого из которых связан с ПУСКОВОЙ кнопкой Ю, выдающей при нажатии единичный сигнал. Прямой выход триггера 17 соединен с входом синхронизации и инверсным R-входом триггера 18 и с первым выходом блока, связанным с входом блока 6. Первый вход блока 9 управления устройством соединен с одним из входов элемента И 19, выход которого соединен с входом синхронизации и инверсным R-входом триггера 17. Второй вход блока 9 соединен с прямым S-входом триггера 18, прямой выход которого подключен к второму выходу блока. К другому входу элемента И 19 подключен инверсный выход одновибратора 20, на вход которого включен единичный элемент 21. Делитель 7 частоты выполнен в виде кольцевого двоичного счетчика, в качестве выходов делителя частоты использованы выходы двух смежных разрядов счетчика. Коммутатор 8 частот выполнен в виде двух элементов И 22 и 23, выходы которого соединены с входами элемента ИЛИ 24. Блок 4 центрирования содержит ревереивный счетчик 25, выходы которого через элемент ИЛИ-НЕ 26 связаны с инвертором 27 и одним из входов элемента И-НЕ 28. Входы блока 4 центрирования подключены к входам управления сложением и вычитанием, счетному входу и инверсному R-входу счетчика 25 и другому входу элемента И-НЕ 28, а выходы - к выходам инвертора 27 и элемента И-НЕ 28. Действие устройства иллюстрируется графиком (фиг. 3), на котором с целью упрощения показана только часть элементов устройства. На графике приняты следующие обозначения: сплошная горизонтальная линия - единичное состояние элемента, ее отсутствие - нулевое; для многостабильного элемента (счетчика) - сплошная линия и ее отсутствие означают ненулевое и нулевое состояния соответственно; пунктирная горизонтальная линия - неопределенное состояние элемента; стрелки - причинные связи; расстояние от конца стрелки вправо до начала или конца горизонтальной линии соответствует прямому или обратному замедлению элемента; стрелка, замкнутая на свое начало, означает память. Такты работы устройства обозначены числами 1-6. Перед началом работы переключателем 13 задают положение плоскости симметрии (ее расстояние до датчика 1). При соответствующем подборе частот это положение может быть задано в единицах длины (например в сантиметрах, дециметрах и метрах, как показано на фиг. 2). Рассмотрены шесть тактов работы устройства, соответствующих его шести устойчивым состояниям. Первый такт. При включении электропитания триггеры 17 и 18 и счетчики 11 и 25, а также связанные с ними элементы 16, 14, 15 и 24 находятся в неопределенном состоянии и затем устанавливаются в нулевое (элемент 16 в единичное) состояние с помощью нулевого импульса одновибратора 20. Этот импульс через элемент И 19 посту.пает на инверсный R-вход триггера 17, который приходит в-нулевое состояние и с помощью нулевого сигнала, появляющегося на своем прямом выходе, соединенном с инверсным R-входом триггера 18, приводит последний в нулевое состояние. Аналогично триггер 18 приводит в нулевое состояние счетчики 11 и 25, а последние приводят в нормальное исходное состояние связанные с ними элементы. К моменту окончания нулевого импульса одновибрятора 20 все элементы устройства приводятся в нормальное исходное состояние, и устройство готово к пуску конвейера. Второй такт. При нажатии кнопки 10 от нее на прямой S-вход триггера 17 поступав ет единичный сигнал. Триггер 17 переходит в единичное состояние и через блок 9 управления приводом, пусковую кнопку, включает привод 5 конвейера. Третий такт. Передний фронт груза включает датчик 1, который подает единичный сигнал на инверсные R-входы счетчиков 11 и 25, на элемент И 23, прямой S-вход триггера 18 и вход управления сложением счетчика 25. Счетчик 25 начинает подсчет импульсов, поступающих от делителя частоты через элементы 23 и 24 на его счетный вход. Счетчик 11 начинает подсчет тех же импульсов. После прохода заднего фронта груза мимо датчика 1 его нулевой сигнал отключает последовательность импульсов от элемента ИЛИ 24 и счетного входа счетчика 25. Четвертый такт. Груз следует до момента расположения заданной плоскости симметрии. Пятый такт. При достижении передним фронтом груза заданной плоскости симметрии на выходе элемента ИЛИ-НЕ 14 появляется единичный сигнал, приостанавливающий через инвертор 16 счет импульсов счетчиком 11 и поступающий через элемент И 15 на вход элемента И 22 и вход управления вычитанием счетчика 25. Через элементы И 22 и ИЛИ 24 на счетный вход этого счетчика поступает последовательность импульсов вдвое большей частоты от выхода следующего младшего разряда кольцевого счетчика делителя 7 частоты, и счетчик 25 начинает работать в режиме вычитания. Шестой такт. При подходе серединь груза к заданной плоскости симметрии нулевые сигналы на всех выходах счетчика 25 вызывает единичный сигнал на выходе элемента ИЛИ-НЕ 26, который через элементы И-НЕ 28 и И 19 переводит в нулевое состоя-ние триггер 17. Последний отключает триггер 18 и, через блок 6, привод 5 конвейера, после чего конвейер останавливается, а все элементы предлагаемого устройства возвращаются в состояние готовности к новому пуску конвейера, соответствующее концу первого такта. Груз центрирован относительно заданной переключателем 13 плоскости симметрии. Расстояние от датчика 1 до заданной плоскости симметрии должно быть больще максимальной длины груза и меньше расстояния между задним фронтом каждого груза и передним следующего за ним груза. При малой требуемой точности центрирования синхронизация генератора с приводом конвейера может отсутствовать. Предлагаемое устройство может быть использовано при автоматическом адресовании грузов переменной длины, при сопряжении конвейера с группой грузозахватных устройств или неадаптивных роботов-манипуляторов, каждый из которых обслуживает- определенное рабочее место. Устройство может быть включено полностью в автоматический цикл; для этого кнопка 10 и переключатель 13 должны быть заменены устройствами автоматического пуска и ввода информации соответственно. В этом случае положение плоскости симметрии при каждом цикле может автоматически перестраиваться, что дает возможность не закреплять роботы-манипуляторы за определенными местами конвейера, а автоматически центрировать грузы переменной длины в точках, соответствующих изменяющимся в каждом цикле положениям манипуляторов. Применение предлагаемого устройства позволит использовать один и тот же конвейер для адресования к грузозахватным или сталкивающим устройствам грузов нескольких размеров, в том числе нестандартных,
ввиду обеспечения их центрирования перед передачей на грузозахватные устройства, а также уменьшить число сопряженных с конвейером дорогостоящих роботов-манипуляторов вследствие возможности использования подвижных(не закрепленных за одним рабочим местом) манипуляторов благодаря автоматической перестройке положения плоскости симметрии грузов, обесп чиваемой предлагаемым устройством.
Puz.Z
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ПОЛУЧЕНИЯ ИНФОРМАЦИИ о МЕСТОПОЛОЖЕНИИ ШТУЧНЫХ ГРУЗОВ НА КОНВЕЙЕРЕ | 0 |
|
SU314710A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
