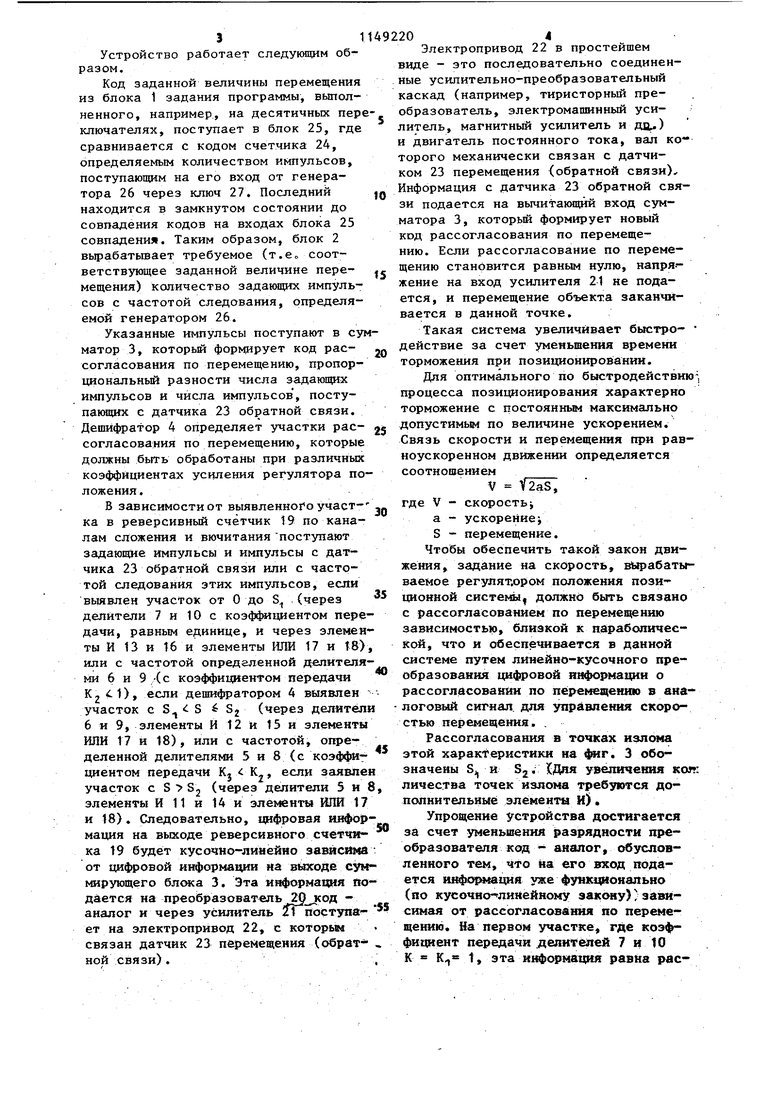
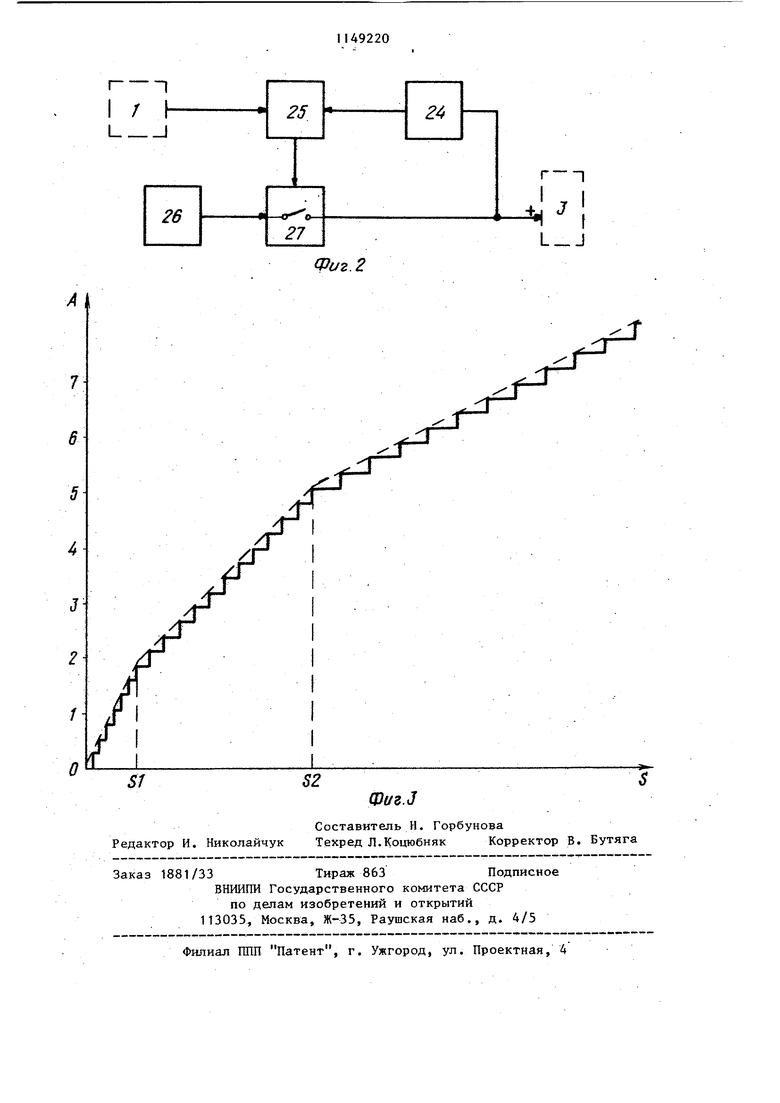
Изобретение относится к автоматическому управлению производственными процессами и может быть применено в цифровых системах автоматического управления позиционированием различных перемещаюпщхся объектов. Известна цифровая система програм много управления, содержащая входное устройство, блок текущего положения управляемого объекта, цифровую часть сравнения заданного и текущего значений положения объекта, воздействую щую на релейный блок управления пере мещением объекта соединенный через редуктор и датчик обратной связи с блоком текущего положения объектаCtJ Недостатком этой системы является то, что релейный блок управления обе печивает наиболее быстрое торможение лишь мгШоинерционных объектов с малыми скоростями, а при больших ско рости и массе объекта управления не позволяет остановить его в заданном положении, что приводит к снижению точности и быстродействия системы в целом. Наиболее близкой к изобретению является цифровая система программного управления содержащая последовательно соединенные преобразователь код-напряжение, усилитель, блок упг ления, датчик обратной связи и сумми рующий блок, вход которого соединен с выходом блока задания программы 2J Недостатками этой системы являютс большое время торможения, необходимость применения корректирующих устройств и -большой аппаратзгрньй объем, обусловленный тем, что разряд ность преобразователя код-напряжение определяется разрядностью кода, дредставляющего максимальный путь торможе ния объекта. Цель изобретения - повышение быстродействия и упрощение устрсйства. Поставленная цель достигается тем что в цифровое устройство для программного управления, содержащее бло задания программы, сумматор, нервьЕй и второй элементы ИЛИ, преобразователь код-аналог, подклк ченный через усилитель к входу электропривода, вал которого механически связан с дат чиком перемещения, соединенным выходом с первьм входом сумматора,в&едены реверсивный счетчик импульсов, пер1вые и вторые делители частоты, дешифратор, по числу вторых и первых делителей частоты, первые и вторые элементы И и формирователь импуль- , сов, подключенный входом к выходу блока задания программы, а выходом к входам первых делителей частоты и к второму входу сумматора, соединенного первым входом с входами вторых делителей частоты, подключенных выходами к первьм входам соответствующих первых элементов И, связанных выходами с входами первого элемента ИЛИ, а вторыми входами с соответствующими выходами дешифратора и с первьми входами соответствующих вторых элементов И, подключенных вторыми входами к выходам соответствующих первых делителей частоты, а выходами - к входам второго элемента ИЛИ, связанного выходом с суммирующим входом реверсивного счетчика, подключенного вычитающим входом к вьпсоду первого элемента ИЛИ, а выходом - к входу преобразователя код-аналог, причем вход дешифратора соединен с выходом сумматора. Кроме того, формирователь импульсов содержит блок совпадения, подключенный nepBbiM входом к входу формирователя импульсов, вторым входом - к выходу сче.тчика импульсов, а выходом -. к управляющему входу ключа, соединенного входом с выходом генератора импульсов, а выходом - с вькодом формирователя импульсов и со счетный входом счетчика импульсов. На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 функциональная схема фop шpoвaтeля импульсов; на фиг. 3 - зависимость амплитуды аналогового сигнала А на выходе преобразователя код - аналог от рассогласования по перемещению S, пропорциональному разности числа задающих импульсов и числа импульсов обратной связи. Устройство содержит блок 1 задания программы, формиро)затель 2 импульсов, сумматор 3, де1шфратор 4, делители 5-10, первые и вторые элементы И 11-13 и M-ie, первый 17 и второй 18 элементы ИЛИ и р еверсивный счетчик 19 импульсов, преобразователь 20 код - аналог усилитель 21, электродвигатель 22 постоянного тока и датчик 23 перемещений (обратной связи). Формирователь 2 импульсов (фиг.2) содержит счетчик 24 импульсов, блок 25 совпадения, генератор 26 импульсов, 27. Устройство работает следующим образом. Код заданной величины перемещения из блока 1 задания программы, выполненного, например, на десятичных пер ключателях, поступает в блок 25, где сравнивается с кодом счетчика 24, определяемым количеством импульсов, поступающим на его вход от генератора 26 через ключ 27, Последний находится в замкнутом состоянии до совпадения кодов на входах блока 25 совпадения. Таким образом, блок 2 вырабатьшает требуемое (т.е соответствующее заданной величине перемещения) количество задающих импульсов с частотой следования, определяемой генератором 26. Указанные импульсы поступают в су матор 3, которьй формирует код рассогласования по перемещению, пропорциональный разности числа задающих импульсов и числа импульсов , поступающих с датчика 23 обратной связи. Дешифратор 4 определяет участки рассогласования по перемещению, которые должны быть обработаны при различных коэффициентах усиления регулятора по ложения. В зависимости от выявленного участка в реверсивный счётчик 19 по каналам сложения и вючитания поступают задающие импульсы и импульсы с датчика 23 обратной связи или с частотой следования этих импульсов, если вь1явлен участок от О до S .(через делители 7 и 10 с коэффидаентом пере дачи, равным единице, и через элемен ты И 13 и 16 и элементы ИЛИ 17 и t8) или с частотой определенной делителя ми 6 и 9 /(с коэффидаентом передачи К« -1), если дешифратором 4 выявлен Sj (через деп«тёл участок с 6 и 9, элементы И t2 и 15 и элементы ИЛИ 17 и 18), или с частотой, определенной делителями 5 и 8 (с коэффициентом передачи Kj х К , если заявле участок с (через деяители 5 и элементы И 11 и 14 и элементы ИЛИ 17 и 18) Следовательно, цифровая инфор мация на выходе реверсивного счётчика 19 будет кусочно-линейно зависима от цифровой информации на выходе сум мирующего блсжа 3. Эта И1 ормащ1Я по дается на преобразователь аналог н через усилитель 5i поступает на электропривод 22, с которьм связан датчик 23 перемещения (обрат ной связи). 1 20 Электропривод 22 в простейшем виде - это последовательно соединенные усилительно-преобразовательный каскад (например, тиристорный преобразователь, электромашинный усилитель, магнитный усилитель и дц..) и двигатель постоянного тока, вал которого механически связан с датчиком 23 перемещения (обратной связи), Информация с датчика 23 обратной связи подается на вычитающий вход сумматора 3, который формирует новый код рассогласования по перемещению. Если рассогласование по перемещению становится равным нулю, напряжение на вход усилителя 21 не подается, и перемещение объекта заканчивается в данной точке. Такая система увеличивает быстро- действие за счет уменьшения времени торможения при позиционировании. Для оптимального по быстродействию -, процесса позиционирования характерно торможение с постоянньм максимально допустимьм по величине ускорением. Связь скорости и перемещения tipH равноускоренном движении определяется соотношением V V2aS, где V - скоростьj а - ускорение; S - перемещение. Чтобы обеспечить такой закон движения задание на скорость, вырабатываемое регулят.ором положения позиционной системы должно быть связано с рассогласованием по перемещению зависимостью, близкой к параболической, что и обеспечивается в данной системе путем линейно-кусочного преобразования цифровой информации о рассогласовании по перемещению в аналоговый сигнал, для управления скоростью перемещения. . Рассогласования в точках излома этой характеристики на 4в{г. 3 обозначены S;j и Sj. Ддя увелияения кол: личества точек излома требуются дополнительные элементы И). Упрощение устройства достигается за счет уменьшения разрядности преобразователя код - аналог, обусловленного тем, что на его вход подается инфо{я4а1р1я уже функционально (по кусочйо-линейному закону)) зависимая от рассогласования по перемещению. На первом участке, где коэффициент передачи .делит ей 7 и 10 К К 1, эта информация равна расI114согласованию по перемещению. На втором участке она В 1/х, раз меньше разности S -S, на третьем участке в 1/Kj раз меньше разности S -Sj и т.д. Следовательно с уменьшением козффициентов передач К, Kj и так далее требуемое количество разрядов преобра зователя код - аналог уменьшается, так как информация, поступакщая на его вход, изменяется медленнее, -чем изменение рассогласования по перемещению т.е. уменьшение разрядности преобразователя код - аналог в предложенной системе обуславливается иэменением (при помощи делителей 5,6 и 8,9) дискретности информации, поступающей на его вход. Это изменение дискретности проявляется (фиг, 3) ка иэкенение величины ступенчатых участ ков S. 0 Уменьшение необходимой разрядности преобразователя код - аналог в устройстве, предназначенном для точ- ного позиционирования объектов, имеющих большой путь торможения, является его существенньи преимуществом, так как в этом сугучае обычное построение системы может стать неприемлемым из-за практической невозможности построения преобразователя код - аналог на необходимое число разрядов. Кроме того емкость сумматора предложенной системы определяется не максимальным заданием на перемещени е, а максимальным рассогласованием по перемещению, которое может быть в несколько раз (и даже на несколько порядков) меньшим, чем задание на перемещение.

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство для программного управления | 1986 |
|
SU1315940A2 |
| Цифровая следящая система | 1980 |
|
SU934446A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Система управления многоканальнымэлЕКТРОпРиВОдОМ РОбОТА | 1979 |
|
SU805246A1 |
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для программного управленияпРиВОдОМ | 1978 |
|
SU798724A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365032C1 |
ЩФРОВОЕ УСТРОЙСТВО ДЛЯ ПРО,rPAMfflOrO УПРАВЛЕНИЯ., содержащее блок задания программы, cyj iaTop, первый и второй элементы ИЛИ, преобразователь код-аналог, подключенный через усилитель к входу электропривода, вал которого механически связан с датчиком перемещения, соединенный выходом с первьш входом сумматора, отличающееся тем, что, с целью повышения быстродействия устройства, в него введены реверсивный счетчик импульсов, первые и вторые делители частоты, по числу вторых и nepBbix делителей частоты, первые и вторые злементьг И и формирователь импульсов, подключенный входом к вьосоду блока задания программы, а выходом - к входам первых делителей частоты и к второму входу сумматора, соединенного первые входом с входами вторых делителей частоты, подключенных выходами к первым входам соответствующих первых элементов И, связанных выходами с входами первого элемента ИЛИ, а вторыми входами - с соответствукшрши находами дешифратора и с первыми входами соответствунидих вторьк элементов И, подключенных вторыми вхоцамк соответствующих первых делителей частоты, а выходами - к входам второго элемента ИЛИ, связанного выходом с суммирующим входом реверсивного счетчика, подключенного вычитакнцим входом к выходу первого элемента ШШ, а выходом - к входу преобразователя код-аналог, причем вход дешифратора соединен с выходом сумматора. 2. Устройство по п. 1, о т л ичающееся тем, что формирователь импульсов содерямт блок совпадения, подключенный первьм входом к входу формирователя импульсов, вторым входом - к выходу счетчика импульсов, а выходом- к управляющему входу ключа, соединенного входом с выходом генератора датульсов, а выходом - с выходом формирователя импульсов и со счетным входом счетчика импульсов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ПРОГРАММНОГО РЕГУЛИРОВАНИЯ СКОРОСТИ подвижных ОБЪЕКТОВ | 0 |
|
SU351200A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровая система автоматического регулирования | 1973 |
|
SU447684A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
