Л
со
ОО
0US.f
Изобретение относится к судостроению и судоремонту, в частности к способам установки секций корпуса судна на стапеле.
Цель изобретения - повышение точности и снижение трудоемкости установки секций.
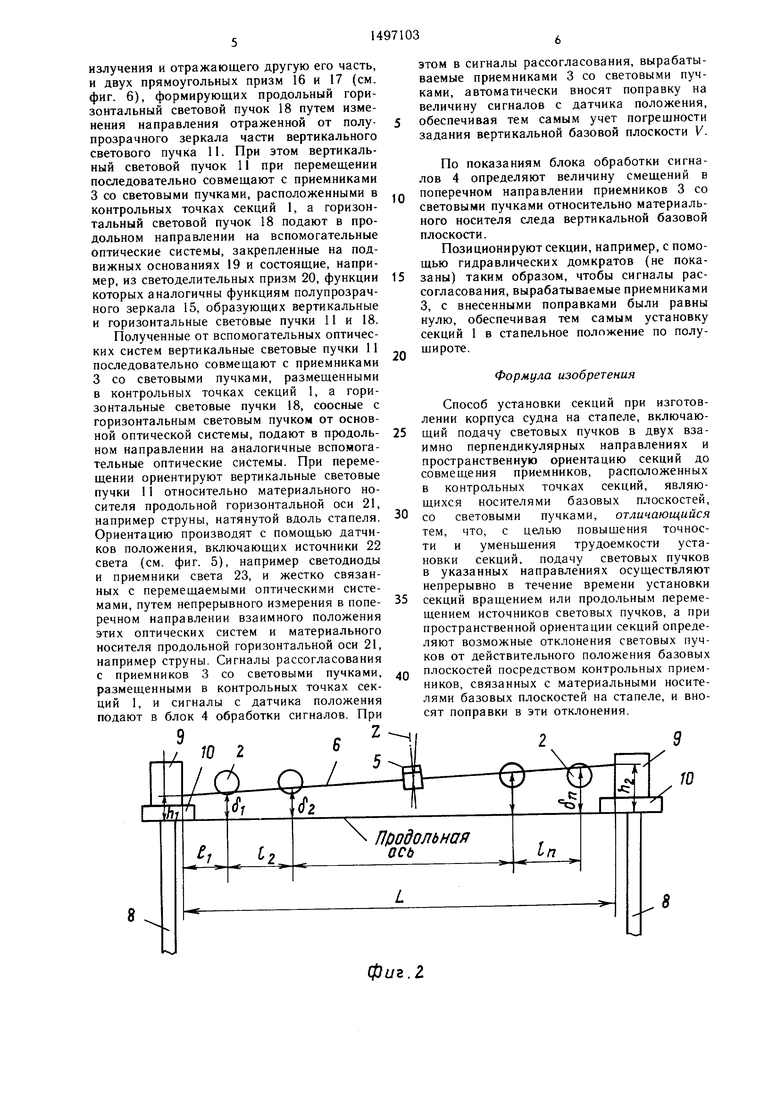
На фиг. 1 изображена схема выполнения способа установки секций при изготовлении корпуса судна; на фиг. 2 - схема определения погрешностей задания базовых плоскостей; на фиг. 3 - то же, что на фиг. 1, вид сбоку; на фиг. 4 - вид А на фиг. 3; на фиг. 5 - вид Б на фиг. 3; на фиг. 6 - вид В на фиг. 5.
Предлагаемый способ заключается в следующем.
Подают световые пучки в двух перпендикулярных направлениях, задают горизонтальные и вертикальные базовые плоскости непрерывным в течение времени установки секций вращением световых пучков относительно вертикальных осей или продольным перемещением световых пучков. Определяют действительное положение базовых плоскостей и при пространственной ориентации секций вносят поправки.
В конкретных условиях способ может быть реализован следующим образом.
В процессе сборки корпуса судна его секции 1 подают на стапель. В контрольных точках секций 1 устанавливают приемники 2 и 3 со световыми пучками и соединяют их с блоком 4 обработки сигналов. Задают горизонтальные базовые плоскости Н непрерывным в течение времени установки секций 1 вращением относительно вертикальных осей Z, например, с помощью поворотных пентапризм 5, световых пучков 6 от блоков излучателей 7, расположенных вдоль стапеля по обе стороны от секций 1.
Определяют действительное положение задаваемых плоскостей Н с помощью вертикальных сообщающихся сосудов 8, заполненных жидкостью, например водой, разнесенных в продольном направлении и установленных на заданных расстояниях один относительно другого и комбинированных датчиков, закрепленных в верхней части сосудов 8. Эти датчики, соединенные с блоком 4 обработки сигналов, представляют собой комбинацию приемников 9 со световыми пучками, аналогичных приемникам 2, и жестко связанных с ними датчиков 10, например, индуктивных, поплавкового типа взаимного положения уровня жидкости в сосудах 8, и приемников 9. Определение действительного положения задаваемых плоскостей Н производят относительно продольных горизонтальных осей, лежащих в плоскости, образованной уровнем жидкости в сообщающихся сосудах 8, путем измерения положения по высоте каждого вращаемого светового пучка 6 в двух точках там, где расположены смежные вертикальные сосуды 8 с комбинированными датчиками.
При этом измерение положения по высоте каждого светового пучка 6 осуществляют в два этапа.
Сначала регистрируют сигналы рассогласования с двух смежных приемников 9, пропорциональные отстоянию по высоте светового пучка 6 от центров этих приемниQ ков 9. Затем регистрируют сигналы от смежных датчиков 10, пропорциональные отстоянию по высоте центров соответствующих приемников 9 от уровня жидкости в сосудах 8. Полученные с приемников 9 и датчиков 10 сигналы суммируют с помощью
блока 4 обработки сигналов, включающего аналого-цифровой преобразователь, арифметико-логическое устройство и блок индикации (не показаны), при этом результирующие сигналы hi , hz со смежных комQ бинированных датчиков характеризуют отстояние по высоте световых пучков 6 от уровня жидкости (см. фиг. 2).
Сигналы рассогласования с приемников 2 со световыми пучками, размещенными в контрольных точках секций 1, подают в
5 блок 4 обработки сигналов. Причем в эти сигналы автоматически вносят поправку на величину 6 /zi-f (hz-h)l/L, где Ль /i2 - соответственно меньщий и больщий по величине результирующие сигналы с комбинированных датчиков, L - расстояние между смежными
вертикальными сосудами 8 по продольной оси; Е, - расстояние по продольной оси между одним из смежных вертикальных сосудов 8, комбинированный датчик которого дает меньщий по величине сигнал h, и приемником 2 со световым пучком, попадающим в промежуток между этими смежными сосудами.
Аналогично вносят поправки на положение всех задаваемых разверткой плоскостей Я, обеспечивая тем самым учет погреш0 ности задания этих плоскостей.
По показаниям блока 4 обработки сигналов определяют величину смещений по высоте приемников 2 относительно уровня жидкости. Позиционируют секции, например, с помощью гидравлических домкратов
(не показаны) таким образом, чтобы сигналы рассогласования, вырабатываемые приемниками 2, с внесенными поправками были равны нулю, обеспечивая тем самым установку секций 1 в стапельное положение по высоте, крену и дифференту. Перемещают вдоль следа вертикальной базовой плоскости V, нанесенного на стапеле, вертикальные световые пучки 11. Это осуществляют путем перемещения основания
12основной оптической системы, включаю- 5 щей вертикально ориентированный источник
13излучения, например лазер, и делительное оптическое устройство 14, состоящее, например, из полупрозрачного зеркала 15 (см. фиг. 5), пропускающего одну часть
5
излучения и отражающего другую его часть, и двух прямоугольных призм 16 и 17 (см. фиг. б), формирующих продольный горизонтальный световой пучок 18 путем изменения направления отраженной от полупрозрачного зеркала части вертикального светового пучка 11. При этом вертикальный световой пучок 11 при перемещении последовательно совмещают с приемниками 3 со световыми пучками, расположенными в контрольных точках секций 1, а горизонтальный световой пучок 18 подают в продольном направлении на вспомогательные оптические системы, закрепленные на подвижных основаниях 19 и состоящие, например, из светоделительных призм 20, функции которых аналогичны функциям полупрозрачного зеркала 15, образующих вертикальные и горизонтальные световые пучки II и 18. Полученные от вспомогательных оптических систем вертикальные световые пучки 11 последовательно совмещают с приемниками 3 со световыми пучками, размещенными в контрольных точках секций 1, а горизонтальные световые пучки 18, соосные с горизонтальным световым пучком от основной оптической системы, подают в продольном направлении на аналогичные вспомогательные оптические системы. При перемещении ориентируют вертикальные световые пучки 11 относительно материального носителя продольной горизонтальной оси 21, например струны, натянутой вдоль стапеля. Ориентацию производят с помощью датчиков положения, включающих источники 22 света (см. фиг. 5), например светодиоды и приемники света 23, и жестко связанных с перемещаемыми оптическими системами, путем непрерывного измерения в поперечном направлении взаимного положения этих оптических систем и материального носителя продольной горизонтальной оси 21, например струны. Сигналы рассогласования с приемников 3 со световыми пучками, размещенными в контрольных точках секций 1, и сигналы с датчика положения подают в блок 4 обработки сигналов. При
0
5
0
5
0
5
0
этом в сигналы рассогласования, вырабатываемые приемниками 3 со световыми пучками, автоматически вносят поправку на величину сигналов с датчика положения, обеспечивая тем самым учет погрещности задания вертикальной базовой плоскости V.
По показаниям блока обработки сигналов 4 определяют величину смещений в поперечном направлении приемников 3 со световыми пучками относительно материального носителя следа вертикальной базовой плоскости.
Позиционируют секции, например, с помощью гидравлических домкратов (не показаны) таким образом, чтобы сигналы рассогласования, вырабатываемые приемниками 3, с внесенными поправками были равны нулю, обеспечивая тем самым установку секций 1 в стапельное положение по полу- щироте.
Формула изобретения
Способ установки секций при изготовлении корпуса судна на стапеле, включающий подачу световых пучков в двух взаимно перпендикулярных направлениях и пространственную ориентацию секций до совмещения приемников, расположенных в контрольных точках секций, являющихся носителями базовых плоскостей, со световыми пучками, отличающийся тем, что, с целью повышения точности и уменьщения трудоемкости установки секций, подачу световых пучков в указанных направлениях осуществляют непрерывно в течение времени установки секций вращением или продольным перемещением источников световых пучков, а при пространственной ориентации секций определяют возможные отклонения световых пучков от действительного положения базовых плоскостей посредством контрольных приемников, связанных с материальными носителями базовых плоскостей на стапеле, и вносят поправки в эти отклонения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ установки секции при изготовлении корпуса судна и устройство для его осуществления | 1984 |
|
SU1248886A1 |
| Способ установки блока корпусаСудНА HA СТАпЕлЕ (ЕгО ВАРиАНТы) | 1979 |
|
SU800015A1 |
| Способ установки блока корпуса судна на стапеле | 1983 |
|
SU1127796A1 |
| Способ установки блоков корпуса судна на стапеле | 1982 |
|
SU1043066A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИУСА КРИВИЗНЫ ТРУБОПРОВОДА ПО ДАННЫМ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ | 2014 |
|
RU2592733C2 |
| Способ сборки стапеля | 1990 |
|
SU1819825A1 |
| СПОСОБ НИВЕЛИРОВАНИЯ, РАЗМЕТКИ И ПРОВЕРКИ КОРПУСА СУДНА | 1992 |
|
RU2094294C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКОГО АЗИМУТА | 2007 |
|
RU2347252C1 |
| Устройство для формирования опорной световой плоскости | 1989 |
|
SU1723436A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |

Изобретение относится к судостроению и судоремонту. Целью изобретения является повышение точности и снижение трудоемкости установки секций. В течение времени установки секций 1 задают горизонтальные базовые Н и вертикальные базовые V плоскости непрерывным вращением источников световых пучков 6 относительно вертикальных осей или продольным перемещением источников вертикальных световых пучков 11. Определение положения секций 1 относительно базовых плоскостей производят с помощью приемников 2 и 3 со световыми пучками, установленных на секциях в контрольных точках. При этом определяются возможные отклонения световых пучков относительно истинного положения базовых плоскостей с помощью контрольных приемников 9 со световыми пучками, связанных с материальными носителями базовых плоскостей, установленных на стапеле, и вносятся поправки на эти отклонения. 6 ил.
продольная ось
In
фuг.Z
| Способ установки секции при изготовлении корпуса судна | 1982 |
|
SU1047770A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
