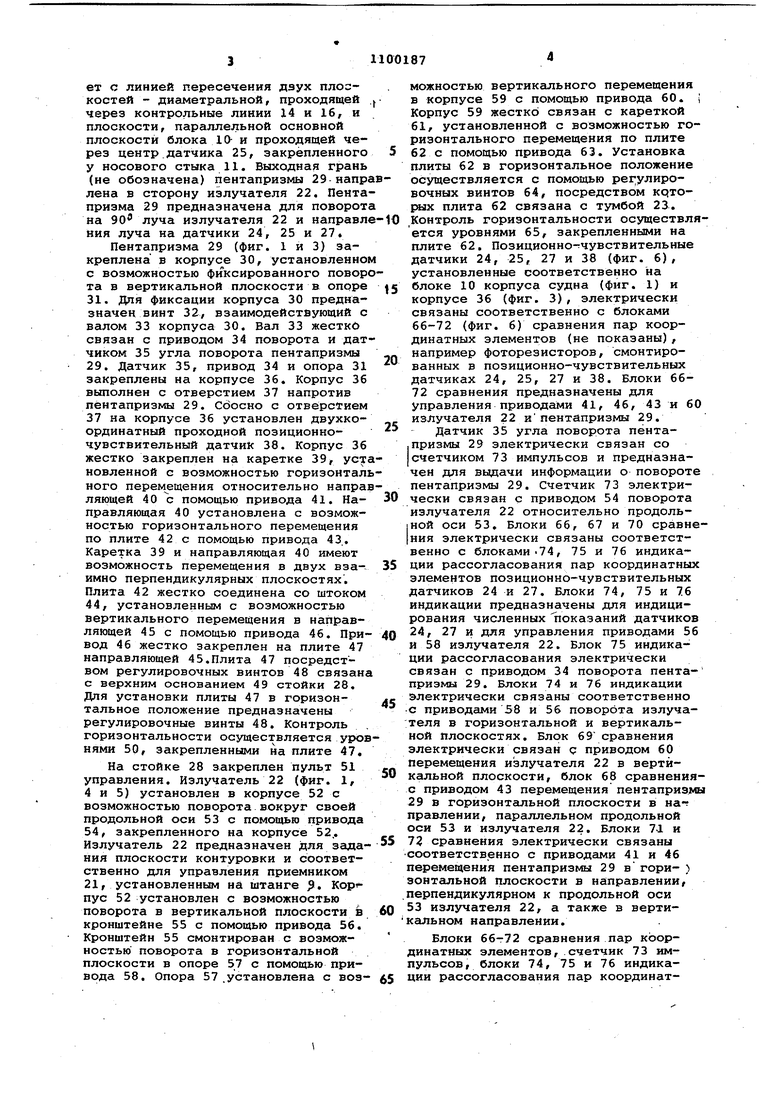
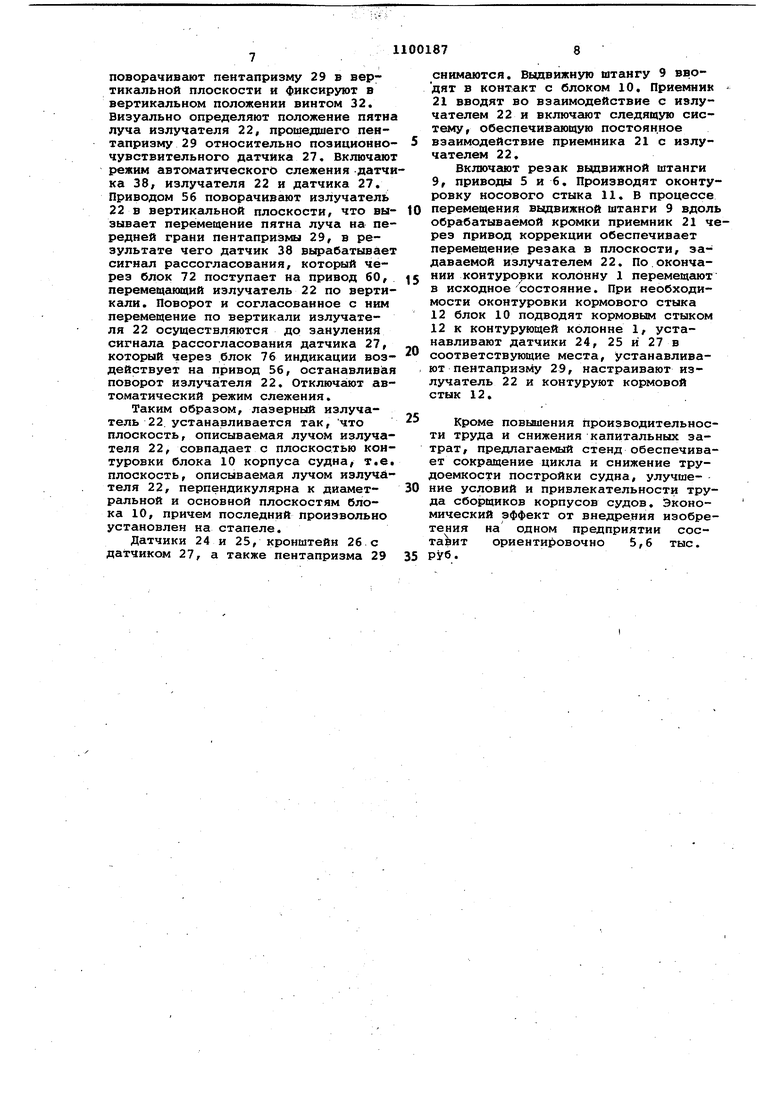
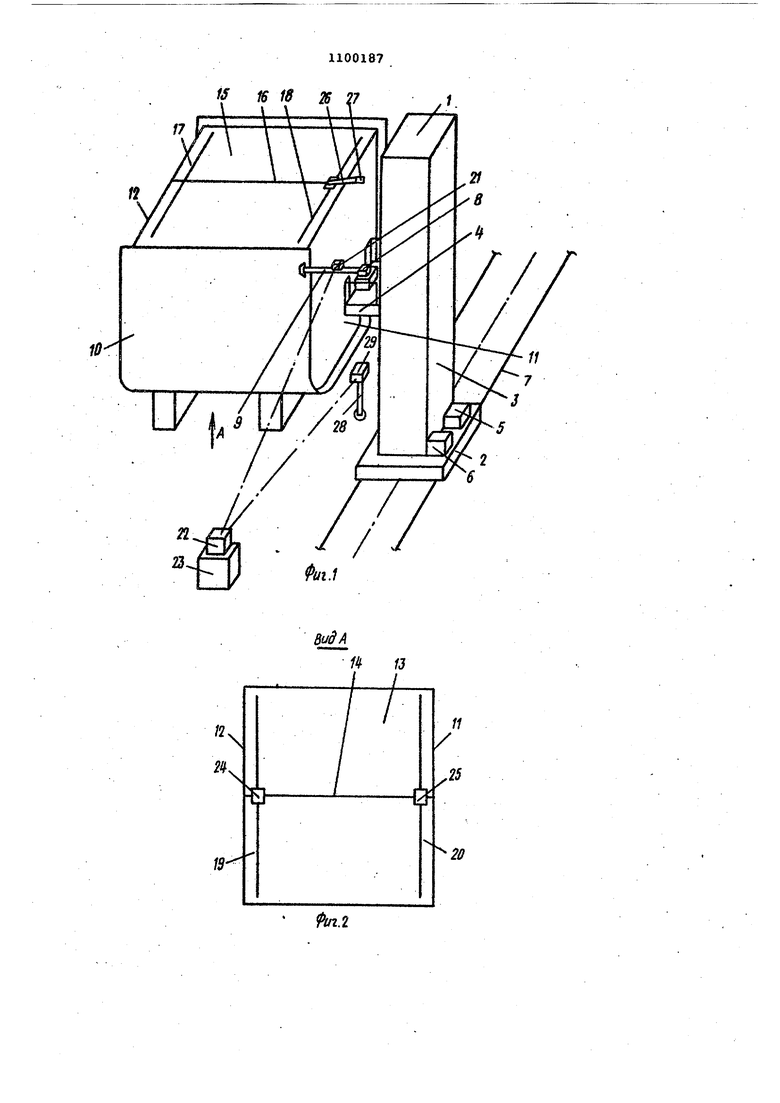
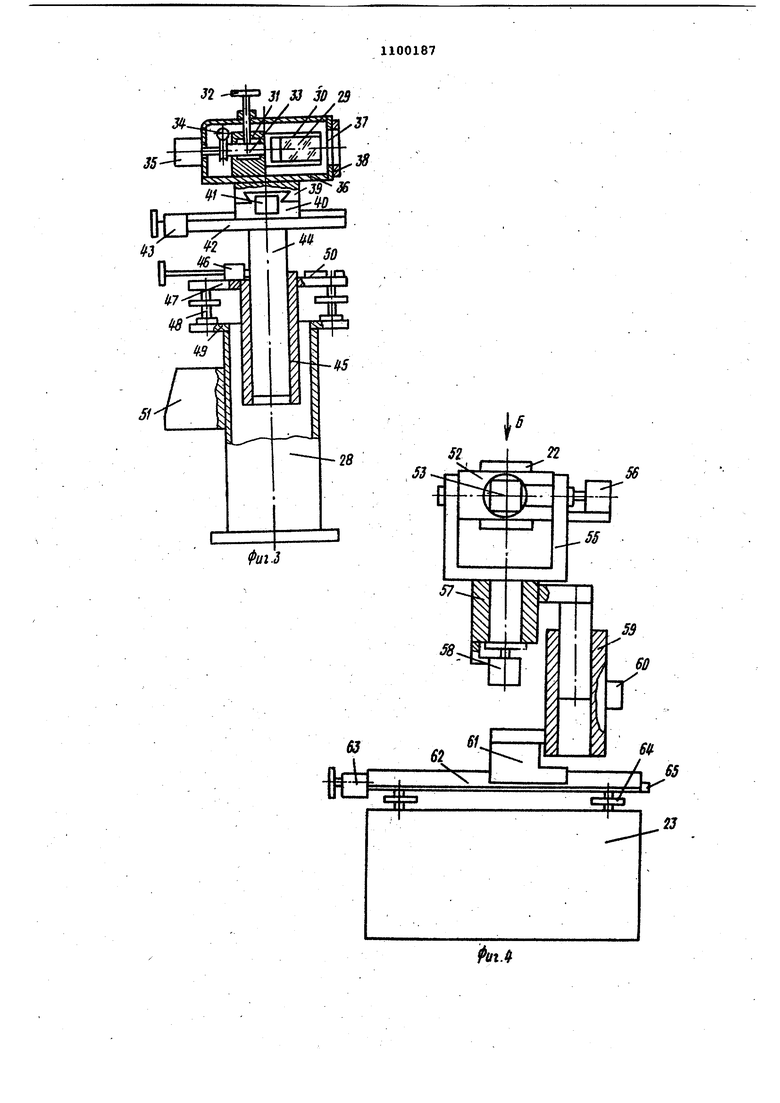
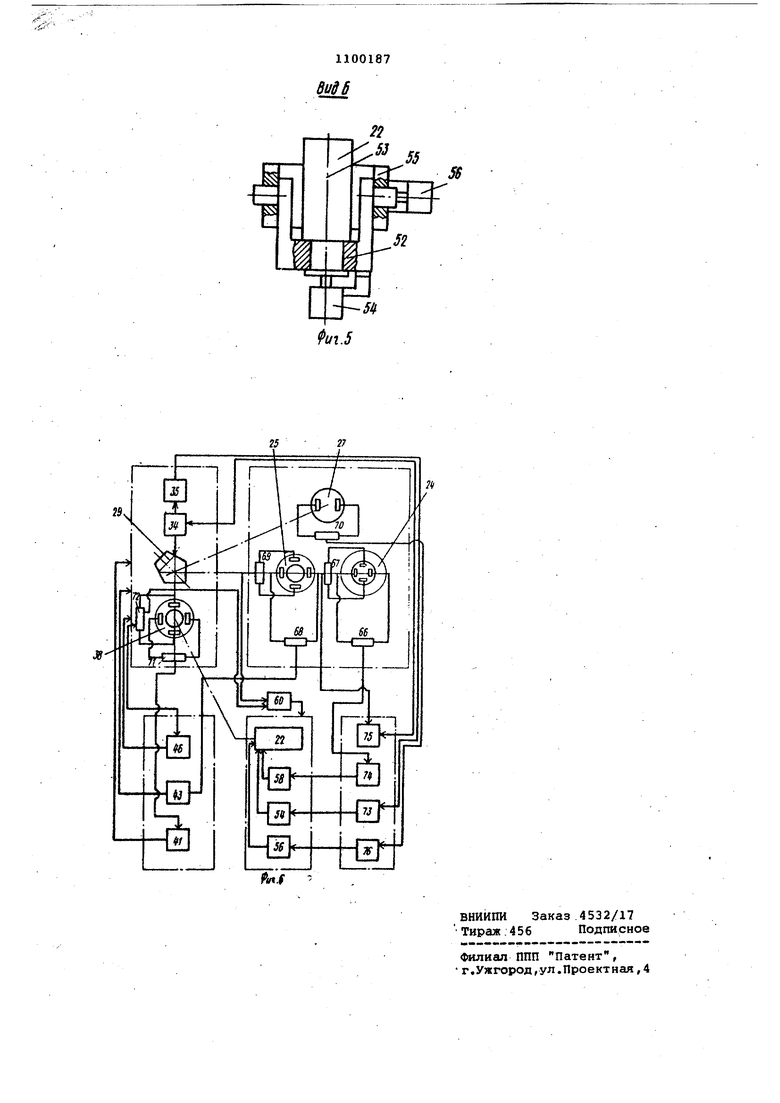
эо vj Изобретение относится к судостро нию а именно к устройствам для кон туровки стыкуемых элементов корпуса судна. Известен стенд для контуровки корпусных конструкций, содержащий подвижную колонну и систему управления резаком, причем колонна содержит самоходную тележку, несущую выдвижную штангу с резаком, а систе ма управления резаком состоит из лазерного излучателя, приемника, установленного на выдвижной штанге, приводов перемещения и поворота излучателя 11 Недостатком известного устройства является невозможность работы в двух плоскостях оконтуровки. Цель изобретения - повьвиение про изводительности труда путем сокраще ния времени на подготовку стенда к контуровке и снижение капитальных затрат на изготовление оборудования Указанная цель достигается тем, что в стенде для контуровки корпусных конструкций, содержащем подвижную колонну и систему управления резаком, причем колонна содержит са моходную тележку, несущую выдвижную штангу с резаком, а система управле ния резаком состоит из лазерного из лучателя, приемника, установленного на выдвижной штанге, приводов перемещения и поворота излучателя, система управления резаком снабжена пентапризмой, устанавливаемой в мес те пересечения плоскости контуровки с диаметральной -плоскостью Ьлока ко пуса судна,приводами перемещения и поворота пентапризмы, позиционночуветвительными датчиками, установленными на входной грани пентапризмы, а также на блоке корпуса судна в точках пересечения диаметральной плоскости с контрольными линиями, обозначенными на днищевой и палубной частях, блоками индикации, блоками сравнения сигналов датчиков и датчиком угла поворота пентапризмы, причем блоки индикации и сравнения электрически связаны с позиционночувствительными датчиками и привода ми пентапризмы излучателя; На фиг. 1 изображен стенд для ко туровки корпусных конструкций, общи вид; на фиг. 2 - вид А на фиг-. 1 (днищевая часть блока корпуса судна на фиг. 3 - пентапрйзма; на фиг. 4 излучатель; на фиг. 5 - вид Б на фиг. 4; на фиг. 6 - принципиальная блок-схема системы наведения излуча теля. Стенд для контуровки корпусных конструкций содержит подвижную Конт рующую колонну 1 (фиг.1),выполненну в виде самоходной тележки 2, на которой установлена колонна 3. На колонне 3 смонтирована кабина 4 с воз мощностью вертикального перемещения по колонне 3 с помощью привода 5 вертикального перемещения, а также горизонтального перемещения совместно с колонной 3 и самоходной тележкой 2 с помощью привода 6, Приводы 5 и 6 установлены на тележке 2; Самоходная тележка 2 установлена с возможностью перемещения по рельсовым путям 7. В кабине 4 смонтирован газорезательный аппарат 8, содержащий выдвижную штангу 9 с резако( (не обозначен), контактирующую с обрабатываемым блоком 10 корпуса судна. В кабине 4 смонтирован привод коррекции (не обозначен) выдвижной штанги 9, предназначенный для перемещения штанги 9 вдоль ее продольной оси (не обозначена). Блок 10 содержит стыки носовой 11 и кормовой 12, днищевую часть 13 (фиг. 2) с контрольной линией 14 диаметральной плоскости, а также палубную часть 15 (фиг. 1) с контрольной линией 16 диаметральной плоскости. На палубной части 15 блока 10 нанесены контрольные линии 17 и 18 крайних шпангоутов, а на днищевой части 13 - контрольные линии 19 и 20 крайних шпангоутов. На выщвижной штанге 9 (фиг. 1) установлен приемник 21, связанный следящей системой (не обозначена) с излучателем 22, установленным на тумбе, 23. Кроме того, приемник 21 электрически связан с приводом коррекции штанги 9. Элементы следящей системы .установлены на приемнике 21 и излучателе 22. На днищевой части 13 (фиг. 2) в точках пересечения контрольной линии 14 и контрольных линий 19 и 20 крайних шпангоутов установлены соответственно двухкоординатный позиционно-чувсвительный датчик 24 и проходной двухкоординатный позйционно-чувствительный датчик 25 с центральным отверстием. На палубной части 15 (фиг. 1) в точке пересечения контрольных линий 16 и 18 крайнего шпангоута носового стыка 11 установлен кронштейн 26, на котором закреплен однокоординатный позиционно-чувствительный датчик 27 с таким расчетом, чтобы его габариты выходили за пределы носового стыка 11 блока 10. Крепление и фиксация датчиков 24 и 25 (фиг. 2) и кронштейна 26 (фиг. 1) с датчиком 27 относительно днип.евой 13 и палубной 15 частей блока 10 осуществлены, например, прижимами (не обозначены) с постоянными ма1гнитами. Датчики 24, 25 и 27 предназначены для приема энергии излучения излучателя 22 и выработки сигналов рассогласования. В районе носового стыка 11 на стойке 28 установлена пентапрйзма 29 таким образом, что её оптический центр ориентировочно совпадает с линией пересечения дзух плоскостей - диаметральной, проходящей через контрольные линии 14 и 16, и плоскости, параллельной основной плоскости блока 10 и проходящей через центр.датчика 25, закрепленного у носового стыка 11. Выходная грань (не обозначена) пентапризмы 29 напр лена в сторону излучателя 22. Пента призма 29 предназначена для поворот на ЭО луча излучателя 22 и направл НИН луча на датчики 24, 25 и 27« Пентапризма 29 (фиг. 1 и 3) закреплена в корпусе 30, установленно с возможностью фиксированного повор та в вертикальной плоскости в опоре 31. Для фиксации корпуса 30 предназначен винт 32, взаимодействующий с валом 33 корпуса 30. Вал 33 жестко связан с приводом 34 поворота и дат чиком 35 угла поворота пентапризмы 29. Датчик 35, привод 34 и опора 31 закреплены на корпусе 36. Корпус 36 выполнен с отверстием 37 напротив пентапризмы 29. CdocHO с отверстием 37 на корпусе 36 установлен двухкоординатный проходной позиционночувствительный датчик 38. Корпус 36 жестко закреплен на каретке 39, ус новленной с возможностью горизонтал ного перемещения относительно напра ляющей 40 с помощью привода 41. Направляющая 40 установлена с возможностью горизонтального перемещения по плите 42 с помощью привода 43.. Каретка 39 и направляющая 40 имеют возможность перемещения в двух азаимно перпендикулярных плоскостях. Плита 42 жестко соединена со штоком 44, установленным с возможностью вертикального перемещения в направляющей 45 с помощью привода 46. Привод 46 жестко закреплен на плите 47 направляющей 45.Плита 47 посредством регулировочных винтов 48 связана с верхним основанием 49 стойки 28. Для установки плиты 47 в горизонтальное положение предназначены регулировочные винты 48. Контроль горизонтальности осуществляется уров нями 50, закрепленными на плите 47. На стойке 28 закреплен пульт 51 управления. Излучатель 22 (фиг. 1, 4 и 5) установлен в корпусе 52 с возможностью поворота вокруг своей продольной оси 53 с помощью привода 54, закрепленного на корпусе 52.. Излучатель 22 предназначен для задания плоскости контуровки и соответственно для управления приемником 21, установленным на штанге . Кор пус 52 установлен с возможностью поворота в вертикальной плоскости в кронштейне 55 с помощью привода 56. Кронштейн 55 смонтирован с возможностью поворота в горизонтальной плоскости в опоре 57 с помощью привода 58. Опора 57 .установлена с возможностью вертикального перемещения в корпусе 59 с помощью привода 60. i Корпус 59 жестко связан с кареткой 61, установленной с возможностью горизонтального перемещения по плите 62 с помощью привода 63. Установка плиты 62 в горизонтальное положение осуществляется с помощью регулировочных винтов 64, посредством кртоjsjx плита 62 связана с тумбой 23. Контроль горизонтальности осуществляется уровнями 65, закрепленными на плите 62, Позиционно-чувствительные датчики 24, 25, 27 и 38 (фиг. 6), установленные соответственно на блоке 10 корпуса судна (фиг. 1) и корпусе 36 (фиг. 3), электрически связаны соответственно с блоками 66-72 (фиг. 6) сравнения пар координатных злементов (не показаны), например фоторезисторов, смонтированных в позиционно-чувствительных датчиках 24, 25, 27 и 38. Блоки 6672 сравнения предназначены для управления приводами 41, 46, 43 и 60 излучателя 22 ипентапризмы 29. Датчик 35 угла поворота пентапризмы 29 злектрически связан со счетчиком 73 импульсов и предназначен для выдачи информации о повороте пентапризмы 29. Счетчик 73 электрически связан с приводом 54 поворота излучателя 22 относительно продольной оси 53. Блоки 66, 67 и 70 сравнения злектрически связаны соответственно с блоками-74, 75 и 76 индикации рассогласования пар координатных элементов позиционно-чувствительных датчиков 24 и 27. Блоки 74, 75 и 76 индикации предназначены для индицирования численных показаний датчиков 24, 27 и для управления приводами 56 и 58 излучателя 22. Блок 75 индикации рассогласования электрически связан с приводом 34 поворота пента- призмы 29. Блоки 74 и 76 индикации электрически связаны соответственно с приводами 58 и 56 поворота излучателя в горизонтальной и вертикальной плоскостях. Блок 69 сравнения электрически связан q приводом 60 перемещения излучателя 22 в вертикальной плоскости, блок 68 сравненияс приводом 43 перемещения пентапризмы 29 в горизонтальной плоскости в на- правлении, параллельном продольной оси 53 и излучателя 22. Блоки 7-1 и 72 сравнения электрически связаны соответственно с приводами 41 и 46 перемещения пентапризмы 29 в гори- ) зонтсшьной плоскости в направлении, перпендикулярном к продольной оси 53 излучателя 22, а также в вертикальном направлении. Блоки 66-72 сравнения пар координатных элементов,.счетчик 73 импульсов , блоки 74, 75 и 76 индикации рассогласования пар координатных элементов смонтированы в пульте 51 управления (фиг. 3). Блок 72 (фиг. 3) электрически дополнительно связан с приводом 60 перемещения излучателя 22 по вертикали. Стенд работает следующим образом Блок 10 корпуса судна передвигается на транспортных средствах (не обозначены) на стапельную позицию, где фиксируется в таком положений, чтобы обрабатываемый монтажный стык например носовой 11, находился а зоне вылета выдвижной штанги 9. На днищевой части 13 блока 10 в точ ках пересечения контрольной линии 14 и контрольных линий 19 и 20 уста навливаются позицирнно-чувствительные датчики 24 и 25. На палубной части 15 блока 10 в точке пересечения контрольных линий 16 и 18 устанавливается кронштейн 26 с датчиком 27. Плиту 62 устанавливают в горизо тальное положение с помощью регулировочных винтов 64. Контроль горизо тальности осуществляют по уровням 6 Излучатель 22 с помощью приводов 60 и 63 перемещают в горизонтальном и вертикальном направлени:ях до такого положения, чтобы его продольная ось 53 ориентировочно совпала с пересечением двух плоскостей горизонтальной и вертикальной, причем горизонтальная должна ориентировочно П1эоходить через центр датчика 25, за крепленного на днище 13 у носовог стыка 11, а.след вертикальной плоскости на полу цеха должен ориентиро вочно проходить через центр площадк (не обозначена), предназначенной дл установки стойки 28 с пентапризмой В районе носового стыка 11 на стойке 28 устанавливается пентапризма 2 таким образом, чтобы ее оптический црнтр ориентировочно совпал с линие пересечения двух плоскостей - диаметральной,проходящей через контроль ные линии 14 и 16, и плоскости, параллельной основной плоскости блока 10 и проходящей через центр датчика 25. Плиту 47 устанавливают в горизонтальное положение с помощью регулировочных винтов 48. Контроль горизонтальности осуществляют по уровням 50. В ручном режиме привода ми 41 и 46 перемещают пентапризму 2 в горизонтальной и вертикальной пло костях до совмещения зоны захвата позицирнно-чувствительного датчика 38 с лучом излучателя 22. Включают автоматический режим взаимного слежения пентапризмы 29 и излучателя 2 Сигналы рассогласования пар фоторез сторов датчика 38 через блоки 71 и 72 поступают на приводы 41 и 46, пе ремещающие пентапризму 29 по горизонтали и вертикали до зануления сигналов рассогласования. В ручном режиме приводом 60 перемещают излучатель 22 по вертикали, приводом 43 пантапризму 29 по горизонтали параллельно продольной оси 53 излучателя 22 до попадания выходного луча пентапризмы 29 и зону захвата позиционно-чувствительного датчика 25, при этом сигнал рассогласования, вырабатываемой на датчике 38, поступает через блок 72 на привод 46, который перемещает пентапризму 29 по вертикали синхронно с излучателем 22. Включают автоматический режим слежения пентапризмы 29, излучателя 22 и датчика 25. Сигналы рассргласования пар фоторезисторов датчика 25 через блоки 68 и 69 поступают на приводы 60 и 43,корректирующие положения излучателя 22 и пентапризмы 29 до зануления сигналов рассогласования датчиков 25 и 38.Визуально определяют положение пятна луча излучателя 22, прошедшего через датчик 25, по отношению к нозициионно-чувствительному датчику 24. В ручном режиме приводом 58 поворачивают излучатель 22 в горизонтальной плоскости, а приводом 34 - пентапризму 29 в вертикальной плоскости до совмещения луча излучателя 22 с зоной захвата датчика 24. Включают автоматический режим слежения датчиков 24 и 25, пентапризмы 29 и излучателя 22. В процессе поворота пентапризмы 29 в вертикальной плоскости привод 34 воздействует на датчик 35 угла поворота, выдающего импульсные сигналы, количество которых пропорционально углу поворота пентапризмы 29, на счетчик 73 импульсов, который управляет приводом 54, поворачивающим излучатель. 22 вокруг продольной оси 53, в результате чего осуществляется синхронный поворот пентапризмы 29 и излучателя 22 на равные углы. Поворот излучателя 22 в горизонтальной плоскости вызывает перемещение пятна луча на передней грани (не обозначена) пентапризмы 29, т.е. уход пятна луча с центра датчика 38, в результате чегоХв нем вырабатывается сигнал рассогласования. Этот сигнал через блок 71 поступает на привод 41, перемещающий пентапризму . 29 в Горизонтальной плоскости до зануления сигнала рассогласования. Одновременно происходит отработка сигналов рассогласования, возникающих в результате изменения положения выходного луча пентапризмы 29 на фоторезисторах датчика 25. Эти сигналы через блоки 68 и 69 поступают на привод 43, перемещающий пентапризму 29 вдоль продольной оси 53 излучателя 22, и привод 60, перемещающий излучатель 22 по вертикали. Отключают автоматический режим слекeния. В ручном режиме приводом 34 поворачивают пентапризму 29 в вертикальной плоскости и фиксируют в вертикальном положении винтом 32. Визуально определяют положение пятна луча излучателя 22, прошедшего пентапризму 29 относительно позиционночувствительного датчика 27. Включают режим автоматического слежения датчи ка 38, излучателя 22 и датчика 27. Приводом 56 поворачивают излучатель 22 в вертикальной плоскости, что вызывает перемещение пятна луча на передней грани пентапризмы 29, в результате чего датчик 38 вырабатывает сигнал рассогласования, который через блок 72 поступает на привод 60, перемещакиций излучатель 22 по вертикали. Поворот и согласованное с ним перемещение по вертикали излучателя 22 осуществляются до зануления сигнала рассогласования датчика 27, который через блок 76 индикации воздействует на привод 56, останавливая поворот излучателя 22. Отключают автоматический режим слежения. Таким образом, лазерный излучатель 22 устанавливается так, что плоскость, описываемая лучом излучателя 22, совпадает с плоскостью контуровки блока 10 корпуса судна, T.et плоскость, описываемая лучом излучателя 22, перпендикулярна к диаметральной и основной плоскостям блока 10, причем последний произвольно установлен на стапеле. Датчики 24 и 25, кронштейн 26 с датчиком 27, а также пентапризма 29 снимаются. Вьщвижную штангу 9 вводят в контакт с блоком 10. Приемник 21 вводят во взаимодействие с излучателем 22 и включают следящую систему, обеспечивающую постоянное взаимодействие приемника 21 с излучателем 22. Включают резак вьщвижной штанги 9, приводы 5 и 6. Производят оконтуровку носового стыка 11. В процессе перемещения выдвижной штанги 9 вдоль обрабатываемой кромки приемник 21 через привод коррекции обеспечивает перемещение резака в плоскости, задаваемой излучателем 22. По окончании контуровки колонну 1 перемещгиот в исходное состояние. При необходимости оконтуровки кормового стыка 12 блок 10 подводят кормовым стыком 12 к контурующей колонне 1, устанавливают датчики 24, 25 и 27 в соответств5тощие места, устанавливают пентапризму 29, настраивают излучатель 22 и контуруют кормовой стык 12. Кроме повышения производительности труда и снижения капитальных затрат, предлагаемый стенд обеспечивает сокращение цикла и снижение трудоемкости постройки судна, улучшение условий и привлекательности труда сборщиков корпусов судов. Экономический эффект от внедрения изобретения на одном предприятии составит ориентировочно 5,6 тыс. руб.
W t6 fS 26 27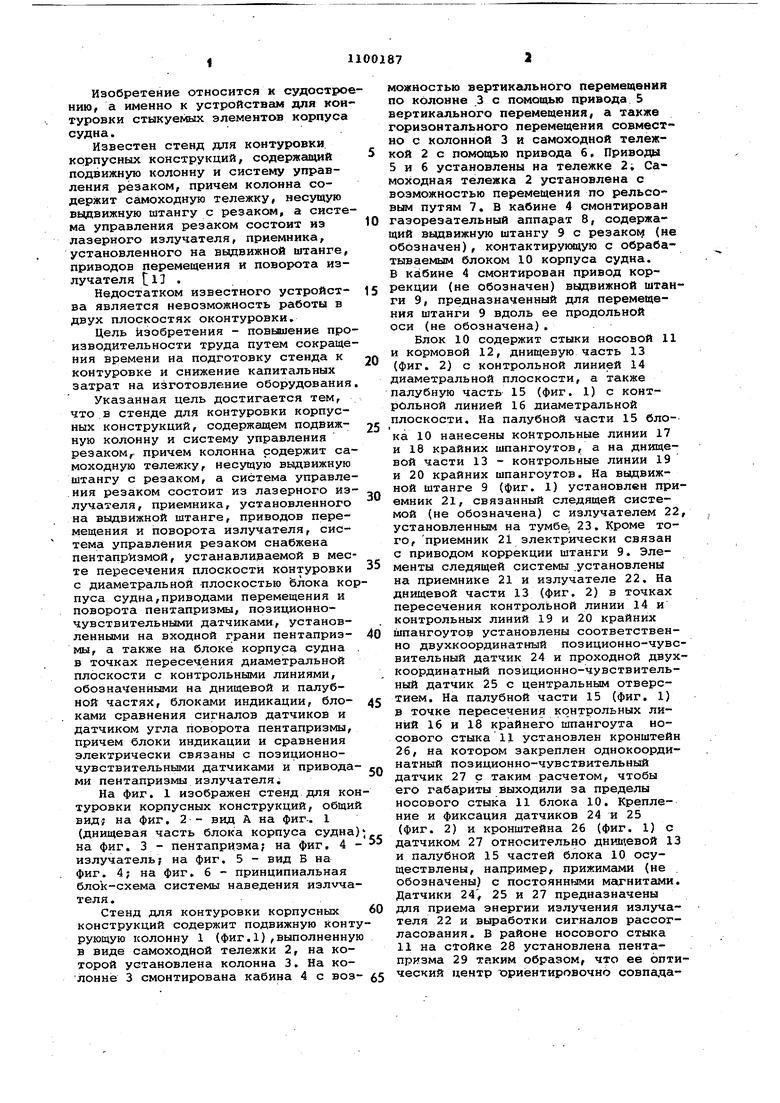
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ установки блока корпусаСудНА HA СТАпЕлЕ (ЕгО ВАРиАНТы) | 1979 |
|
SU800015A1 |
| Способ установки блоков корпуса судна на стапеле | 1982 |
|
SU1043066A1 |
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1982 |
|
SU1074760A2 |
| Способ установки секции при изготовлении корпуса судна и устройство для его осуществления | 1984 |
|
SU1248886A1 |
| Способ формирования корпуса судна и устройство для его осуществления | 1981 |
|
SU1025577A1 |
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1981 |
|
SU1002180A2 |
| Устройство для сборки цилиндрической части корпуса судна | 1981 |
|
SU994328A1 |
| Устройство для оконтуровки стыкуемых элементов корпуса судна | 1978 |
|
SU740592A2 |
| Способ сборки объемных конструкций борта и днища при формировании блоков корпуса судна | 1983 |
|
SU1105371A1 |
| Способ установки блока корпуса судна на стапеле | 1983 |
|
SU1127796A1 |
СТЕНД ДЛЯ КОНТУРОВКИ КОРПУСНЫХ КОНСТРУКЦИЙ, содержащий подвижную колонну и систему управления резаком, причем колонна содержит самоходную тележку, несущую выдвижную штангу с резаком, a система.управления резаком состоит из лазерного излучателя, приемника, установленного на выдвижной штанге, приводов перемещения и поворота излучателя, отличающийся тем, что, с целью повышения производительности труда путем сокращения времени на подготовку стенда к контуровке и снижения капитальных затрат на изготовление оборудования, система управления резаком снабжена пентапризмой, устанавливаемой в месте пересечения плоскости контуровки с диаметральной плоскостью блока корпуса судна, приводами перемещения и поворота пентапризмы, позиционно-чувствительными датчиками, установленными на входной грани пентапризмы, a также на блоке корпуса судна в точках пересечения диаметральной плоскости с контрольными линиями, обозначенными на днищевой и палубной частях, блоками индика- ции, блоками сравнения сигналов дат-® чиков и датчиком угла поворота пен(Л тапризмы, причем блоки индикации и сравнения электрически связаны с позиционно-чувствительными датчиками и приводами пентапризмы и излучателя.
n
n
19
n 13
11
X
25
/
20
-ЗГХ
1Ц
f
«J
iK
J
duSS
55
56
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сборник | |||
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
