Изобретение относится к области машиностроения, в частности к устройствам для преобразования равномерного и неравномерного вращения в прерывистое с остановками.
Вопросы останова решаются, как правило, с помощью стопорных защелок либо сочленением зубчатых реек с шестерней. Широко известны механизмы преобразования движения с остановом, в которых останов осуществляется с помощью подпружиненных собачек - храповых механизмов (см. , например, а.с. СССР 586285, F 16 H 27/04, 1977; а.с. СССР 1523799, F 16 H 25/06, 1989).
Недостатком этих механизмов является их ненадежность при больших скоростях.
В известном роторном двигателе (патент США 4174903, F 02 В 53/00, 1979) имеется механизм привода, состоящий из коромысла, которое вводит зубчатые рейки в зацепление с соответствующими зубчатыми шестернями первого и второго ведомых валов (фиг.3 описания). Ведомые валы расположены коаксиально. Зубчатое коромысло попеременно входит в зацепление с зубчатой шестерней то одного вала, то другого, вращая их поочередно с периодическими остановами.
Недостатком механизма привода является то, что при больших скоростях вращения имеет место заедание зубьев и, как следствие, заклинивание и поломка привода.
Известен механизм для преобразования движения, содержащий входной вал и выходные валы, установленные коаксиально, шарнирный четырехзвенник с пальцами, соединенный с выходными валами, диск с направляющими, установленный соосно с валами и жестко связанный с входным валом, и неподвижный элемент, задающий траекторию движения пальцев. Неподвижный элемент, задающий траекторию движения пальцев, выполнен в виде кулачка. Шарнирный четырехзвенник выполнен в виде рычагов и шарнирных элементов и расположен между кулачком и диском (а.с. СССР 1191658, F 16 Н 25/04, 1985).
Недостатком механизма является ненадежность соединения диска и кулачка с помощью пальцев, т. к. возникает необходимость дополнительного уравновешивания пальцев для соблюдения условия постоянной параллельности осей пальцев и оси вращения валов. В описанном механизме такое уравновешивание не достигнуто и имеет место заедание конца пальцев в пазах и перекос осей пальцев относительно валов.
Попытка устранения перекоса осей пальцев относительно оси всего механизма описана в дополнительном изобретении (а.с. СССР 1249247, F 16 Н 25/04, 1986). Согласно изобретению механизм для преобразования движения снабжен двумя дополнительными дисками, установленными на кулачке с возможностью вращения в плоскости вращения валов, и секторами, укрепленными на шарнирах четырехзвенника и взаимодействующими с дополнительными дисками.
Недостатком механизма остается перекос осей пальцев относительно осей валов. Кроме того, механизм является очень сложным, что также приводит к его ненадежности.
Другая попытка устранения перекоса осей пальцев относительно оси всего механизма описана в изобретении (а.с. СССР 1504438, F 16 Н 25/04, 1989). Описан механизм для преобразования движения, содержащий входной вал, жестко установленный на нем диск с направляющими, неподвижный кулачок с пазами, выходной вал с жестко установленным на нем передаточным звеном и пальцы, взаимодействующие с диском, пазами неподвижного кулачка и передаточным звеном. Передаточное звено выполнено в виде кулачка с дуговыми пазами, предназначенными для взаимодействия с пальцами.
Недостатком механизма остается перекос осей пальцев относительно осей валов, т. к. при работе механизма происходит заклинивание пальцев в пазу диска даже при небольших скоростях, что обуславливает ненадежность механизма в целом.
Наиболее близким по технической сущности к заявляемому является механизм преобразования движения по а.с. СССР 1191658, F 16 Н 25/04, 1985, описанный выше.
Задачей изобретения является создание надежного механизма для преобразования движения, в котором параллельность осей пальцев и оси вращения валов обеспечивается конструкцией. Поставленная задача решается тем, что механизм для преобразования движения, содержащий входной вал и выходные валы, установленные коаксиально, шарнирный четырехзвенник с пальцами, соединенный с выходными валами, диск с направляющими, установленный соосно с валами и жестко связанный с входным валом, и неподвижный элемент, задающий траекторию движения пальцев, дополнительно снабжен установленным на внешнем выходном валу вторым диском с направляющими, связанным с первым диском через узел синхронизации, а шарнирный четырехзвенник выполнен в виде кривошипно-шатунных механизмов с ползунами, установленными в направляющих дисков, причем к концу каждого кривошипа присоединено по два шатуна, а противолежащие ползуны первого и второго дисков соединены между собой пальцами, при этом неподвижный элемент, задающий траекторию движения пальцев, расположен между дисками и выполнен в виде бугеля сложной конфигурации, взаимодействующего с пальцами.
Взаимодействие пальцев с бугелем осуществляется, например, через ролики или колодки.
Конфигурация бугеля образована соединением дуг разного радиуса.
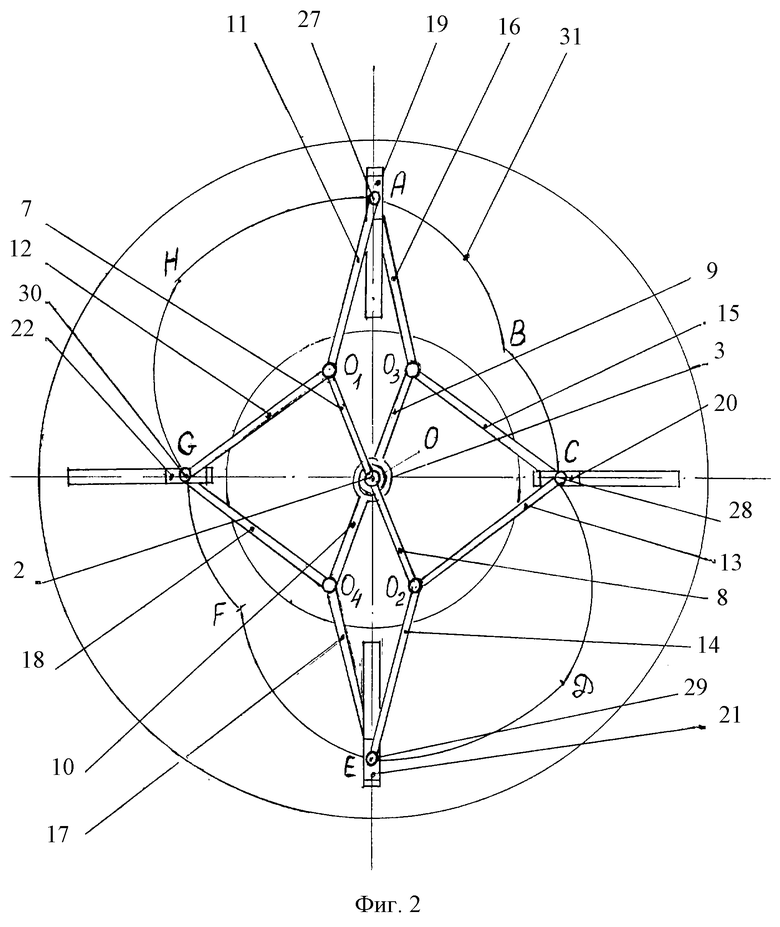
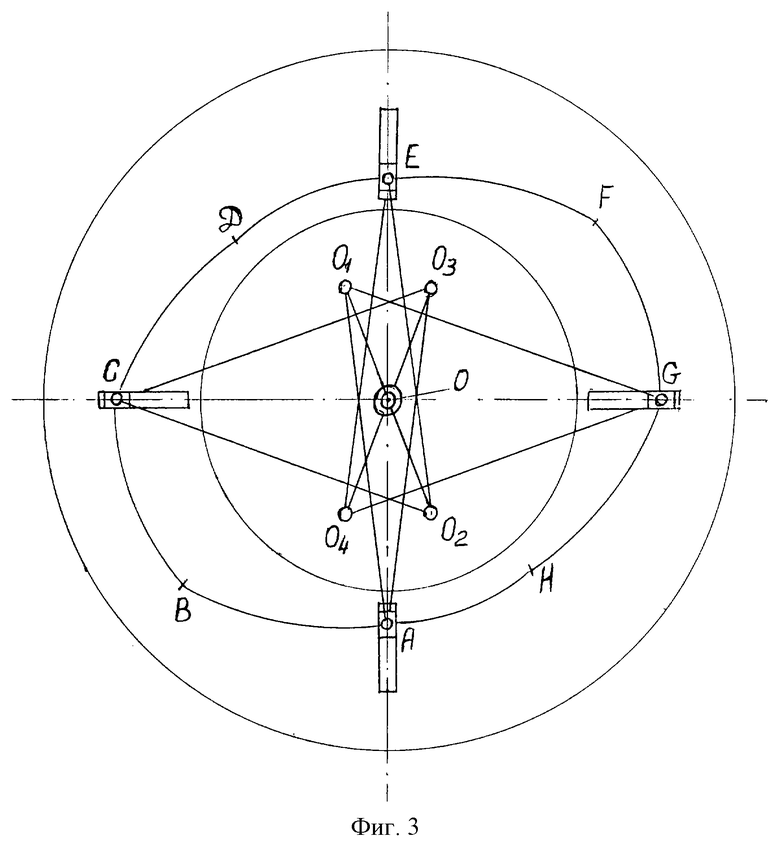
На фиг. 1 дан общий вид предложенного механизма в разрезе; на фиг.2 - кинематическая схема преобразователя; на фиг. 3 - вариант кинематической схемы.
Механизм для преобразования движения (фиг.1) содержит входной вал 1, выходные валы 2 и 3, на которых установлены соответственно диски 4 и 5, связанные между собой узлом синхронизации их вращения 6. Кривошипно-шатунные механизмы содержат кривошипы 7 и 8, закрепленные на валу 2, и кривошипы 9 и 10, закрепленные на валу 3. К концу кривошипа 7 присоединены шатуны 11 и 12; к концу кривошипа 8 присоединены шатуны 13 и 14; к концу кривошипа 9 присоединены шатуны 15 и 16; к концу кривошипа 10 присоединены шатуны 17 и 18. Кривошипно-шатунные механизмы связывают вал 2 с ползунами 19, 20, 21, 22 диска 4, а вал 3 - с ползунами 23, 24, 25, 26 диска 5. Противолежащие ползуны 19-23, 20-24, 21-25, 22-26 соединены пальцами 27, 28, 29 и 30 соответственно (фиг.2). Между дисками 4 и 5 расположен неподвижный бугель 31.
Входной вал 1 и выходные валы 2 и 3 имеют общую ось, причем выходные валы 2 и 3 установлены коаксиально. Диски 4 и 5 установлены соосно с валами. Диск 4 жестко связан с входным валом 1. Диск 5 установлен на внешнем выходном валу 3. В дисках 4 и 5 выполнены направляющие для ползунов. Направляющие могут быть выполнены любым известным образом, например в виде прорезей, спиц и т.п. Узел синхронизации 6 может быть выполнен в виде любой известной конструкции, например в виде зубчатой передачи. В центральной части пальцев 27, 28, 29 и 30 могут быть установлены ролики или колодки, взаимодействующие с бугелем 31. Бугель 31 имеет сложную конфигурацию, которая образована соединением дуг разного радиуса. На фиг.2 показаны следующие дуги: АВ, ВС, CD, DE, EF, FG, GH, НА. Дуги DE и НА равны по длине и имеют одинаковый радиус с центром в точке О, расположенной на оси механизма. Дуги ВС и FG равны по длине и имеют одинаковый радиус с центром в точке О, расположенной на оси механизма. Дуги АВ и GH равны по длине и имеют одинаковый радиус с центром в точке О1, расположенным в точке соединения кривошипа 7 с шатунами 11 и 12. Дуги CD и EF равны по длине и имеют одинаковый радиус с центром в точке O2, расположенным в точке соединения кривошипа 8 с шатунами 13 и 14.
Механизм для преобразования движения работает следующим образом. При вращении вала 1 приводятся в синхронное движение диски 4 и 5. Синхронность вращения обеспечивается узлом 6. Приведенные в движение вращением дисков 4 и 5 пальцы 27-30, обкатываясь по кривой бугеля 31, воздействуют на ползуны 19-26, которые передают усилия на шатуны 11-18. Шатуны, в свою очередь, передают усилие на кривошипы 7-10, которые приводят во вращение валы 2 и 3. Режимы движения валов определяются сложной конфигурацией кривой бугеля 31. При конфигурации кривой бугеля 31, изображенного на фиг.2, при перемещении пальцев 27-30 соответственно по дугам АВ, CD, EF и GH кривошипы 7 и 8 будут неподвижны. Следовательно, вал 2 не вращается. В это время кривошипы 9 и 10 перемещаются по часовой стрелке до достижения пальцами 27-30 конца дуг. При этом вращается вал 3, связанный с кривошипами 9 и 10. При достижении пальцами точек В, D, F и Н пальцы переходят на дуги ВС, DE, FG и НА. При этом кривошипы 7, 8, 9 и 10 перемещаются одновременно и, соответственно, оба выходных вала 2 и 3 вращаются до достижения пальцами точек С, Е, G, А. При этом положение кривошипов 7 и 8 (ось О1-О2) изменилась и они переместились в положение кривошипов 9 и 10 (ось O3-O4). А кривошипы 9 и 10 заняли положение по оси О1-O2. Далее цикл повторяется.
На фиг. 3 представлен другой вариант кинематической схемы с удлиненными шатунами для получения более плавной кривой бугеля. Работа механизма аналогична работе по вышеописанному варианту.
Использование предлагаемого изобретения обеспечивает очень высокую надежность преобразования движения, поскольку сама конфигурация кривой бугеля как бы создана фиксированными размерами и законами движения кривошипно-шатунных механизмов. Механизм обеспечивает описанное движение при равномерном и/или неравномерном вращении входного вала. Предложенный механизм может быть реверсивным и обратимым, т.е. передавать движение и в обратной последовательности (от валов 2 и 3 - к валу 1).
Изобретение относится к области машиностроения, в частности к устройствам для преобразования равномерного и неравномерного вращения в прерывистое с остановками. Технический результат - создание надежного механизма для преобразования движения, в котором обеспечивается параллельность осей пальцев и оси вращения валов. Устройство содержит входной вал, с которым жестко связан диск с направляющими, а также выходные валы, расположенные коаксиально. На внешнем выходном валу установлен второй диск с направляющими, связанный с первым через узел синхронизации. В устройстве имеется шарнирный четырехзвенник в виде кривошипно-шатунных механизмов с ползунами, установленными в направляющих дисков. Противолежащие ползуны первого и второго дисков соединены между собой пальцами. Траекторию движения пальцев задает неподвижный элемент, расположенный между дисками. 1 з.п.ф-лы, 3 ил.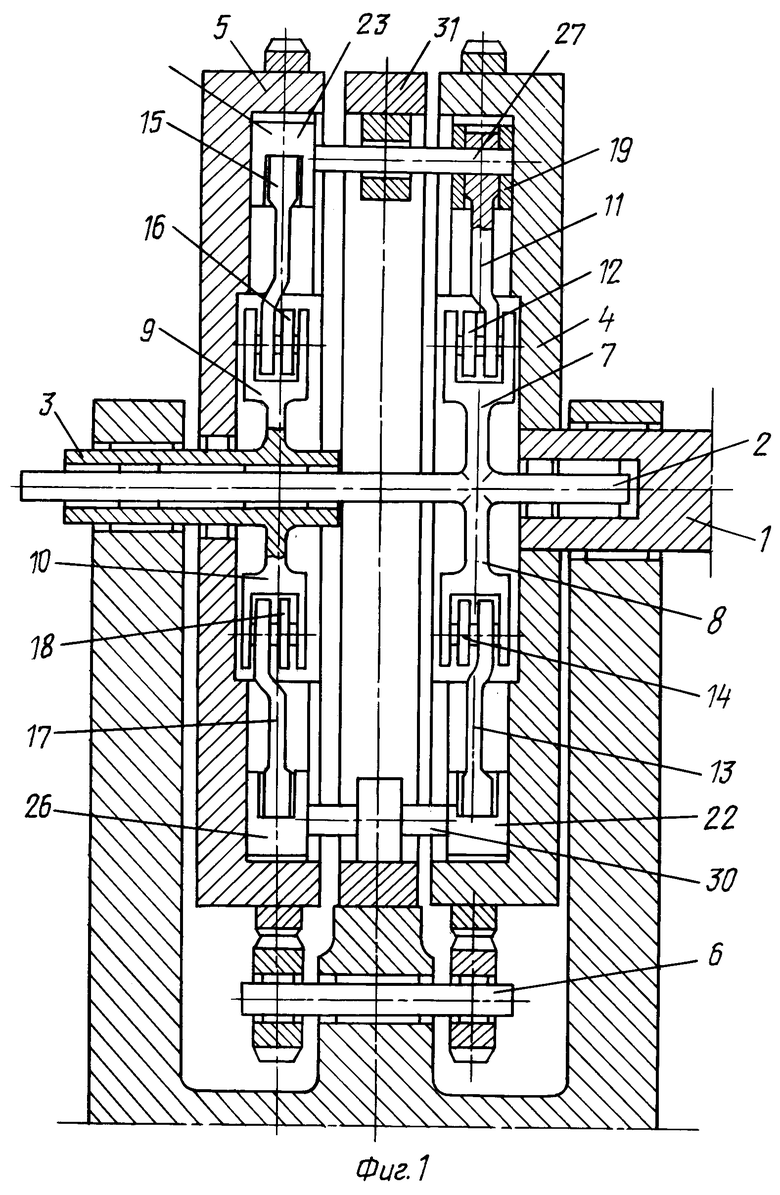
| Механизм для преобразования движения | 1984 |
|
SU1191658A1 |
| Механизм для преобразования движения | 1984 |
|
SU1249247A2 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |

