Изобретение относится к электроехнике и может быть использовано в лектроприводах,конвейеров.
Цель изобретения - .улучшение услоий пуска электропривода конвейера.
На фиго 1 представлена схема устойства для управления пуском электопривода конвейера; на фиг. 2 - диграмма напряжений на выходе блока правления
Устройство для управления- пуском электропривода конвейера соде ржит последовательно соединенные .задатчик 1 интенсивности, программное устройство 2, блок 3 управления, электродвигатель 4 и тяговый орган 5 кон- вейера. Программное устрой ство 2 со- держит источник 6 питания, два резистора 7 и 8, три реле 9-11, два пороговых элемента 12 и 13, два интегратора 14 и 15, генератор 16 синусом- . дальных колебаний, модулятор 17, матор 18 с двумя входами, датчик 19 тока и датчик 20 скорости.
Выход задатчика 1 интенсивности связан с входом первого интегратора 14 через две параллельные цепи, одна из которых состоит из последовательно включенных размыкающего контакта 21 первого реле и первого резистора 7, а другая - из последовательно включенных замыкающего контакта 22 второго реле и второго резистора 8, вькод .первого интегратора 14 соединен с первьм входом сумматора 18, с входом первого порогового элемента 12 и через размыкающий контакт 23
третьего реле 11 связан с входом второго интегратора 15, который по входу питания соединен с входом питания генератора 16 синусоидальных колебаний и через последовательно соединенные замыкающий контакт 24 первого реле .9 и размыкающий контакт 25 второго реле 10 связан с выходом источника 6 питания, выходы второго интегратора 15. и генератора 16 синусоидальных колебаний соединены .с входами модулятора 17, выход которого соединен с вторым входом сумматора 18, выходы первого порогового элемента 12, датчика 20 скорости и второго порогового элемента 13 соединены с входами соответственно первого 9, второго 10 и третьего 11 реле, а вьосоды датчика
19 тока и сумматора 18 соединены с входами соответственно второго порогового элемента 13 и блока 3 управления.
Устройство для управления пуском электропривода конвейера работает, следующим образом.
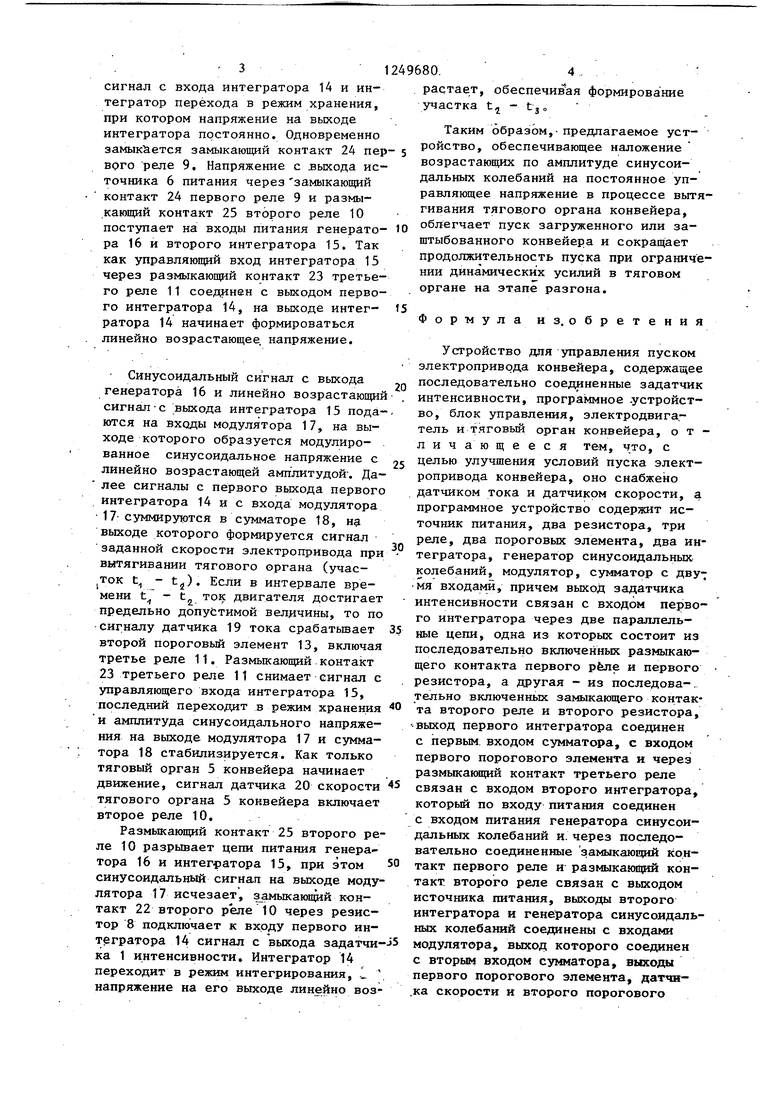
На фиг. 2 показана диаграмма заданной скорости электропривода в про- дессе пуска конвейера. На участке
О ких
t, происходит выбор кинематичесзазоров, на участке t
- Ч вы
тягивание тягового органа конвейера, на участке t - запуск конвейера. В процессе вытягивалия тягового органа (t, - t) постоянный по амплитуде сигнал заданной скорости электропривода, прикладываемый к блоку управления, суммируется с возрастающим по амплитуде синусоидальным напряжением. Это создает возрастающие колебания момента электродвигателя 4 относительно постоянного уровня и приводит к вибрации тягов ого органа, что облегчает процесс страгивания. Как только усилия в тяговом органе достигнут уровня сил сопротивления, тяговой орган начнет движение. Силы сопротивления уменьшаются, поэтому необходимость в синусоидальном изменении момента отпадает, и это воздействие при появлении сигнала скорости тягового органа конвейера снимают. Дальнейшее изменение управляю- щего воздействия осуществляют по линейномуч закону ( t), обеспечив , вающему ограничение усилий в тяговом органе, ..
0
5
Если при вытягивании тягового органа амплитуда синусоидальных колебаний момента (тока) электродвигателя достига.ет предельно допустим.ого уровня, то ее стабилизируют.
При пуске с выхода задатчика 1 интенсивности через размыкающий контакт 21 первого реле 9 и резистор 7 на вход интегратора 14 поступает постоянное напряжение, на выходе которого оно изменяется по линейному закону. Далее сигнал через сумматор 18 и блок 3 управления поступает на электродвигатель 4, При этом формируется участок О - t диаграммы (фиг, 2). При достижении уровня сигнала заданной скорости, необходимого для вытягивания тягового органа на выходе первого порогового элемента 12, формируется напряжение, включающее первое реле 9, При этом размыкается размыкающий контакт 21, снимая
5
сигнал с входа интегратора 14 и интегратор перехода в режим хранения, при котором напряжение на выходе интегратора постоянно. Одновременно замыкается замыкающий контакт 24 пер вого реле 9, Напряжение с выхода источника 6 питания через замыкающий контакт 24 первого реле 9 и размыкающий контакт 25 второго реле 10 поступает на входы питания генерато- ра 16 и второго интегратора 15. Так как управляющий вход интегратора 15 через размыкающий контакт 23 третьего реле 11 соединен с выходом первого интегратора 14, на выходе интег- ратора 14 начинает формироваться линейно возрастающее, напряжение.
Синусоидальный сигнал с выхода генератора 16 и линейно возрастающий сигнал-с выхода интегратора 15 подаются на входы модулятора 17, на выходе которого образуется модулиро- . ванное синусоидальное напряжение с линейно возрастающей амплитудой . Далее сигналы с первого выхода первого интегратора 14 и с входа модулятора 17-суммирзтотся в сумматоре 18, н выходе которого формируется сигнал заданной скорости электропривода при вытягивании тягового органа (учас- |Ток Ц - t). Если в интервале времени t - t ток двигателя достигает предельно допустимой величины, то по сигналу датчика 19 тока срабатьшает второй пороговый элемент 13, включая третье реле 11. Размыкающий контакт 23 третьего реле 11 снимает сигнал с управляющего входа интегратора 15, последний переходит в режим хранения и амплитуда синусоидального напряжения на выходе модулятора 17 и сумматора 18 стабилизируется. Как только тяговый орган 5 конвейера начинает движение, сигнал датчика 20 скорости тягового органа 5 конвейера включает второе реле 10.
Размыкающий контакт 25 второго реле 10 разрывает цепи питания генератора 16 и HHTerjjaTopa 15, при этом синусоидальный сигнап на выходе модулятора 17 исчезает, замыкаквдй контакт 22 второго реле 10 через резистор 8 подключает к входу первого интегратора 14 сигнал с выхода задатчи ка 1 интенсивности. Интегратор 14 переходит в режшл интегрирования, 1 напряжение на его выходе линейно возрастает, обеспечившая формирование
участка
Ч t,
5 Ю 15
20
25
30
35
40
45
50
J5
Таким образом,- предлагаемое устройство, обеспечивающее наложение возрастающих по амплитуде синусоидальных колебаний на постоянное управляющее напряжение в процессе вытягивания тягов.ого органа конвейера, облегчает пуск загруженного или за- штыбованного конвейера и сокращает продолжительность пуска при ограничении динамических усилий в тяговом органе на этапе разгона.
Формула из, обретения
Устройство для управления пуском электропривода конвейера, содержащее последовательно соединенные задатчик интенсивности, программное устройство, блок управления, электродвига,- тель и тяговый орган конвейера, отличающееся тем, что, с целью улучшения условий пуска электропривода конвейера, оно снабжено датчиком тока и датчиком скорости, а программное устройство содержит источник питания, два резистора, три реле, два пороговых элемента, два интегратора, генератор синусоидальных колебаний, модулятор, сумматор с двумя входами, причем выход задатчика интенсивности связан с входом первого интегратора через две параллельные цепи, одна из которых состоит из последовательно включенных размыкающего контакта первого реле и первого резистора, а другая - из последова-. тельно включенных замыкающего контакта второго реле и второго резистора, выход первого интегратора соединен с первым входом сумматора, с входом первого порогового элемента и через размыкакнций контакт третьего реле связан с входом второго интегратора, который по входу питания соединен с входом питания генератора синусоидальных колебаний и. через последовательно соединенные замыкающий контакт первого реле и размыкающий контакт, второго реле связан с выходом источника питания, выходы второго интегратора и генератора синусоидальных колебаний соединены с модулятора, выход которого соединен с вторым входом сумматора, выкоды первого порогового элемента, датчи- .ка скорости и второго порогового
51249680«
элемента соединены с входами соот- сумматора соединены с входами второ- ветственно первого, второго и треть- го порогового элемента и блока уп его реле, а выходы датчика тока и равления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ пуска частотно-управляемого асинхронного электродвигателя | 1988 |
|
SU1534738A2 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Устройство для управления пуском электродвигателя | 1989 |
|
SU1700732A1 |
| Устройство для моделирования бесконтактного двигателя постоянного тока | 1980 |
|
SU1035618A1 |
| Электропривод для механизма с циклической импульсной нагрузкой | 1981 |
|
SU1001408A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ВИБРАТОРА | 2003 |
|
RU2239935C1 |
| Устройство для регулирования и контроля производительности измельчителя | 1990 |
|
SU1791031A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| Электропривод постоянного тока | 1984 |
|
SU1239820A1 |
| УСТРОЙСТВО ДЛЯ КЛАССИФИКАЦИИ МНОГОПАРАМЕТРИЧЕСКИХ ОБЪЕКТОВ | 1991 |
|
RU2049355C1 |
Изобретение относится к злект- ротехнике и может быть использовано в электродах конвейеров. Цель изобретения - улучшение условий пуска электропривода (ЭП) конвейера. Устройство содержит задатчик 1 интенсивности, программное устройство (ПУ) 2, блок 3 -управления, электродвигатель (ЭД) 4 и тяговый орган 5 конвейера (ТОК)о Устройство снабжено датчиком (Д) 19 тока и Д 20 скорости, а ПУ выполнено на источнике 6 питания, двух .резисторах 7 и 8, трех реле 9 (контакты 21 и 24), 10 (контак ты 22 и-25) -и 11 (контакт 23) двух пороговых элементах 12 и 13, двух интеграторах 14 и. 15, генераторе 16 синусоидальных колебаний, модуляторе 17, сумматоре 18 и Д 19 и 20. Изобретение обеспечивает наложение возрастающих по. амплитуде синусоидальных колебаний на постоянное управляющее напряжение в процессе вьггягивания ТОК, облегчает пуск загруженного конвейера и сокращает продолжительность пуска при ограничении динамических усилий в ТОК на этапе разгона. 2 ил. .§ (Л ю 4;: СО а 00
tj
фиг. 2
Редактор А.Козориэ
Составитель В.Трофименко
Техред Л.Олейншс Корректор Л. Пилипенко
4338/58
Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
iz
| Шубенко В.А., Браславский И.Я | |||
| Тиристорный асинхроиньй электропривод с фазовым управлением | |||
| М.:.Энергия, 1972, с | |||
| Термосно-паровая кухня | 1921 |
|
SU72A1 |
| Устройство для управления пуском электропривода конвейера | 1978 |
|
SU771831A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
